【常见问题一网打尽:yolo目标检测新对象解决方案大揭秘】
发布时间: 2024-08-15 17:21:42 阅读量: 11 订阅数: 17 

# 1. YOLO目标检测概述**
YOLO(You Only Look Once)是一种实时目标检测算法,它通过一次卷积神经网络(CNN)推理来预测目标的边界框和类别。与其他目标检测算法不同,YOLO 将目标检测视为回归问题,而不是分类问题。
YOLO 算法的优势在于其速度和准确性。它可以在实时处理视频流,同时保持较高的检测精度。 YOLO 算法的这种高效性使其非常适合于视频监控、自动驾驶和增强现实等应用。
# 2.1 卷积神经网络(CNN)基础
### 2.1.1 卷积和池化操作
卷积神经网络(CNN)是一种深度学习模型,专门用于处理具有网格状结构的数据,例如图像和视频。CNN 的核心操作是卷积和池化。
**卷积**操作通过一个称为卷积核的过滤器在输入数据上滑动,生成一个称为特征图的新数据。卷积核中的权重用于提取输入数据的局部特征。
**池化**操作通过将输入数据中的相邻元素分组并使用聚合函数(如最大值或平均值)来减少特征图的大小。池化可以减少计算量并提高模型的鲁棒性。
### 2.1.2 激活函数和损失函数
**激活函数**是非线性函数,应用于卷积或池化操作的输出。激活函数引入非线性,使模型能够学习复杂的关系。常见的激活函数包括 ReLU、sigmoid 和 tanh。
**损失函数**用于衡量模型预测与真实标签之间的差异。常见的损失函数包括交叉熵损失和均方误差损失。损失函数的值用于指导模型的训练过程,通过最小化损失函数来优化模型参数。
### 代码示例:
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
# 定义卷积层
conv = nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1)
# 定义池化层
pool = nn.MaxPool2d(kernel_size=2, stride=2)
# 定义激活函数
relu = nn.ReLU()
# 定义损失函数
loss_fn = nn.CrossEntropyLoss()
# 逻辑分析:
# 卷积层使用 3x3 的卷积核,步长为 1,填充为 1,将 3 通道输入转换为 64 通道特征图。
# 池化层使用 2x2 的最大池化核,步长为 2,将特征图大小减半。
# ReLU 激活函数应用于池化层输出,引入非线性。
# 交叉熵损失函数用于衡量模型预测与真实标签之间的差异。
```
# 3.1 YOLO模型的训练和评估
### 3.1.1 数据集的准备和预处理
YOLO模型的训练需要大量标注良好的数据集。常用的数据集包括:
- COCO数据集:包含超过20万张图像,标注了80个物体类别。
- PASCAL VOC数据集:包含超过11000张图像,标注了20个物体类别
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到我们的专栏,深入探索 YOLO 目标检测新对象的世界。从概念到实践,我们将为您提供权威指南,揭秘 10 个实战案例,展示其在不同领域的应用场景。
我们将深入探讨 7 大算法秘籍,帮助您提升检测精度。通过实战案例解析,您将了解 YOLO 在特定领域的应用和性能优化策略。我们还将解答常见问题,提供解决方案,并与其他算法进行对比分析,帮助您了解 YOLO 的优劣势。
此外,我们将独家分享 YOLO 在特定领域的应用和案例,展示其在深度学习领域的创新应用。您还将获得在边缘设备上部署和优化 YOLO 的实战指南,以及构建自己的目标检测模型的教程。
我们提供性能提升秘籍、数据增强和模型训练优化技巧,以及超参数调优和模型选择的专业指南。最后,我们将探讨目标遮挡和重叠、复杂场景中的挑战以及 YOLO 与其他计算机视觉任务的结合。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Technical Guide to Building Enterprise-level Document Management System using kkfileview
# 1.1 kkfileview Technical Overview
kkfileview is a technology designed for file previewing and management, offering rapid and convenient document browsing capabilities. Its standout feature is the support for online previews of various file formats, such as Word, Excel, PDF, and more—allowing user
Parallelization Techniques for Matlab Autocorrelation Function: Enhancing Efficiency in Big Data Analysis
# 1. Introduction to Matlab Autocorrelation Function
The autocorrelation function is a vital analytical tool in time-domain signal processing, capable of measuring the similarity of a signal with itself at varying time lags. In Matlab, the autocorrelation function can be calculated using the `xcorr
Python pip性能提升之道
# 1. Python pip工具概述
Python开发者几乎每天都会与pip打交道,它是Python包的安装和管理工具,使得安装第三方库变得像“pip install 包名”一样简单。本章将带你进入pip的世界,从其功能特性到安装方法,再到对常见问题的解答,我们一步步深入了解这一Python生态系统中不可或缺的工具。
首先,pip是一个全称“Pip Installs Pac
Python序列化与反序列化高级技巧:精通pickle模块用法

# 1. Python序列化与反序列化概述
在信息处理和数据交换日益频繁的今天,数据持久化成为了软件开发中不可或缺的一环。序列化(Serialization)和反序列化(Deserialization)是数据持久化的重要组成部分,它们能够将复杂的数据结构或对象状态转换为可存储或可传输的格式,以及还原成原始数据结构的过程。
序列化通常用于数据存储、
Pandas中的文本数据处理:字符串操作与正则表达式的高级应用
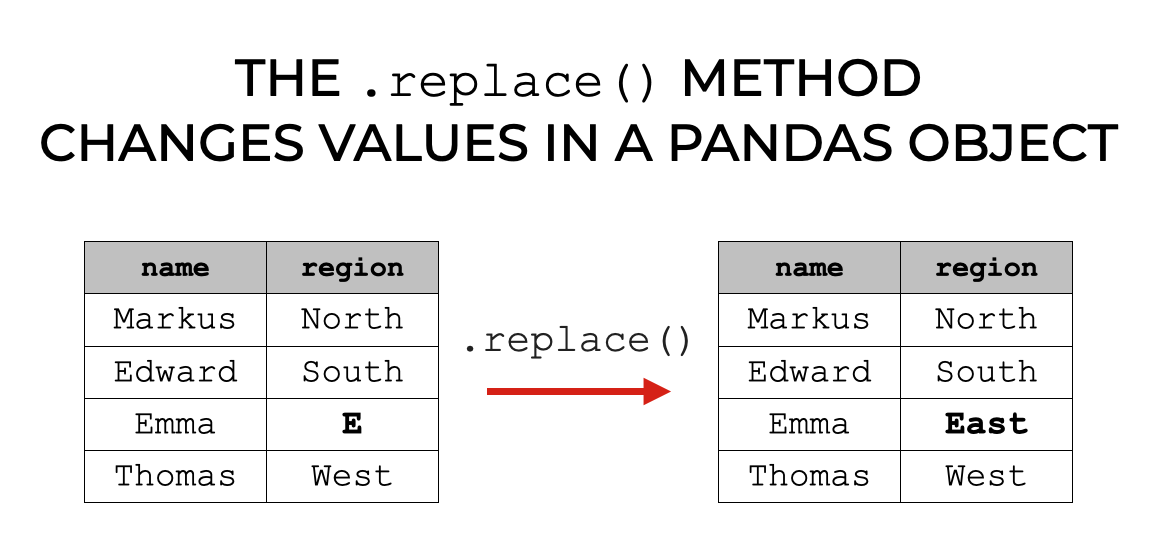
# 1. Pandas文本数据处理概览
Pandas库不仅在数据清洗、数据处理领域享有盛誉,而且在文本数据处理方面也有着独特的优势。在本章中,我们将介绍Pandas处理文本数据的核心概念和基础应用。通过Pandas,我们可以轻松地对数据集中的文本进行各种形式的操作,比如提取信息、转换格式、数据清洗等。
我们会从基础的字
Python print语句装饰器魔法:代码复用与增强的终极指南

# 1. Python print语句基础
## 1.1 print函数的基本用法
Python中的`print`函数是最基本的输出工具,几乎所有程序员都曾频繁地使用它来查看变量值或调试程序。以下是一个简单的例子来说明`print`的基本用法:
```python
print("Hello, World!")
```
这个简单的语句会输出字符串到标准输出,即你的控制台或终端。`prin
[Frontier Developments]: GAN's Latest Breakthroughs in Deepfake Domain: Understanding Future AI Trends
# 1. Introduction to Deepfakes and GANs
## 1.1 Definition and History of Deepfakes
Deepfakes, a portmanteau of "deep learning" and "fake", are technologically-altered images, audio, and videos that are lifelike thanks to the power of deep learning, particularly Generative Adversarial Networks (GANs
Image Processing and Computer Vision Techniques in Jupyter Notebook
# Image Processing and Computer Vision Techniques in Jupyter Notebook
## Chapter 1: Introduction to Jupyter Notebook
### 2.1 What is Jupyter Notebook
Jupyter Notebook is an interactive computing environment that supports code execution, text writing, and image display. Its main features include:
-
【Python集合异常处理攻略】:集合在错误控制中的有效策略
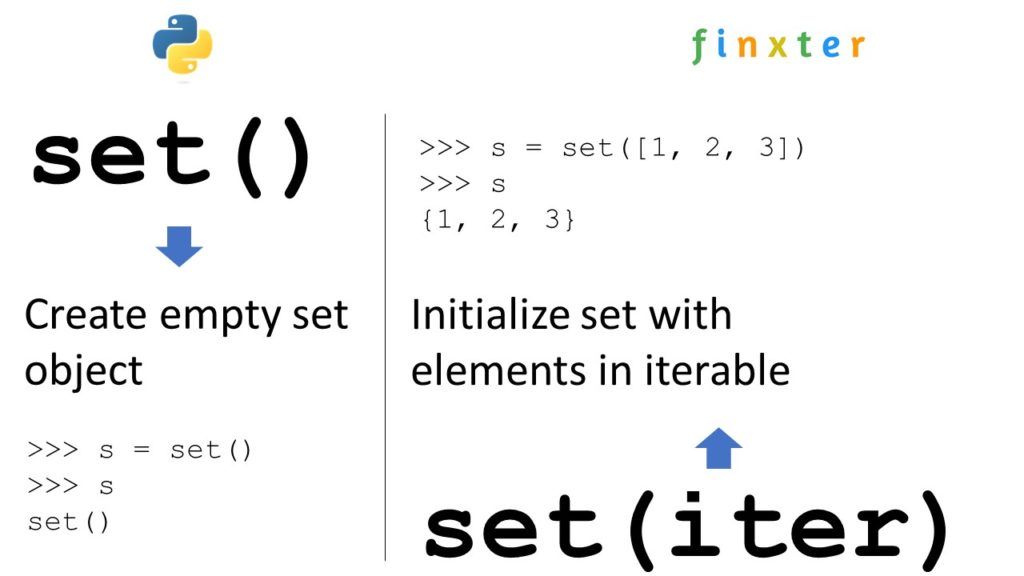
# 1. Python集合的基础知识
Python集合是一种无序的、不重复的数据结构,提供了丰富的操作用于处理数据集合。集合(set)与列表(list)、元组(tuple)、字典(dict)一样,是Python中的内置数据类型之一。它擅长于去除重复元素并进行成员关系测试,是进行集合操作和数学集合运算的理想选择。
集合的基础操作包括创建集合、添加元素、删除元素、成员测试和集合之间的运
Python版本控制实战手册:pyenv和virtualenvwrapper精通指南
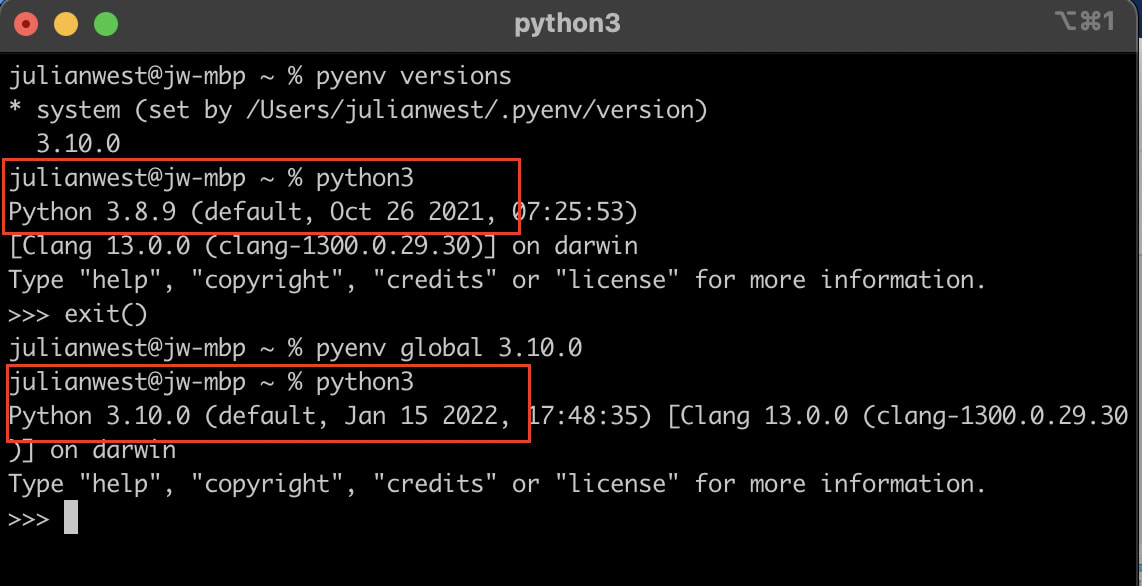
# 1. 版本控制与Python环境管理概述
在现代软件开发过程中,版本控制和环境管理是两个至关重要的方面。它们确保了项目的可追溯性、可协作性以及在不同开发环境下的可复现性。Python作为一门广泛使用的编程语言,其环境管理尤其需要严谨的策略,以确保代码在不同的系统和依赖环境下能稳定运行。
## 1.1 版
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )