01背包问题在路径规划中的应用探究
发布时间: 2024-04-13 00:41:44 阅读量: 74 订阅数: 40 

动态规划01背包问题
# 1.1 背包问题的定义与分类
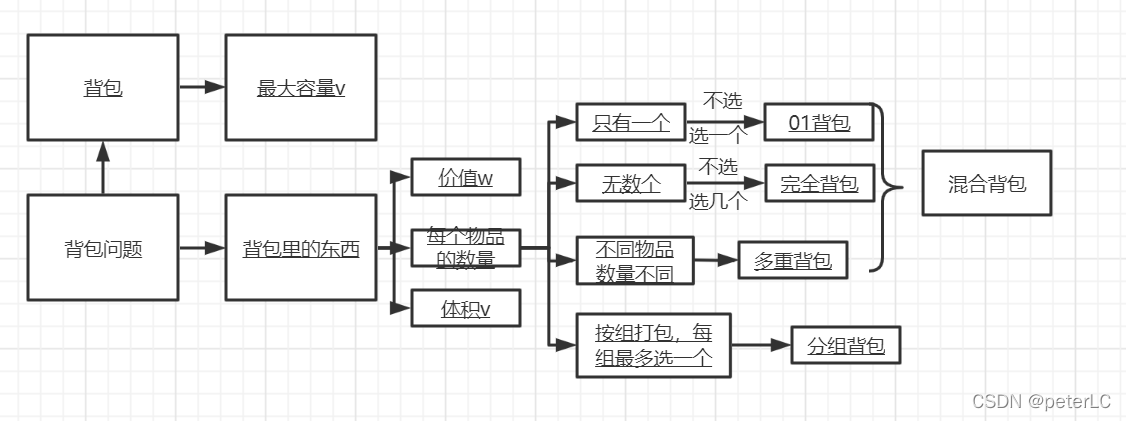
背包问题是一个经典的组合优化问题,其基本思想是,在有限的资源约束下,如何选择物品放入背包,使得价值最大化。根据不同的约束条件和限制性质,背包问题可分为多种类型,常见的有0/1背包问题、分数背包问题和多重背包问题。0/1背包问题要求每种物品只能选择一次,分数背包问题可选取物品的一部分,而多重背包问题允许多次选择同一种物品。不同类型的背包问题在实际应用中有着各自的特点和解法,对于计算机科学领域的算法设计与优化起着重要的作用。
# 2. 路径规划与动态规划
### 2.1 动态规划在路径规划中的作用
在路径规划中,动态规划是一种重要的算法思想,能够有效地解决各种最优路径或最短路径的计算问题。通过动态规划,我们可以找到从起点到终点的最优路径,实现路径规划的精准性和高效性。
#### 2.1.1 最短路径问题
最短路径问题是路径规划中常见的一种情况,我们希望找到两点之间经过的路径长度最短的路线。在动态规划中,有几种经典的算法可以解决最短路径问题,其中包括:
##### 2.1.1.1 Dijkstra算法
Dijkstra算法是一种用于求解图中某一节点到其余各节点的最短路径的算法。它采用贪心策略,通过逐步扩展离起始节点最近的节点来逐步确定最短路径。
```python
# Python实现Dijkstra算法
def dijkstra(graph, start):
dist = {node: float('infinity') for node in graph}
dist[start] = 0
queue = []
heapq.heappush(queue, (dist[start], start))
while queue:
current_dist, current_node = heapq.heappop(queue)
if current_dist > dist[current_node]:
continue
for neighbor, weight in graph[current_node].items():
distance = current_dist + weight
if distance < dist[neighbor]:
dist[neighbor] = distance
heapq.heappush(queue, (distance, neighbor))
return dist
```
##### 2.1.1.2 Floyd算法
Floyd算法是一种动态规划算法,用于解决任意两点之间的最短路径问题。该算法通过中转点逐步优化路径长度,直到得到最优解。
```python
# Python实现Floyd算法
def floyd(graph):
n = len(graph)
for k in range(n):
for i in range(n):
for j in range(n):
graph[i][j] = min(graph[i][j], graph[i][k] + graph[k][j])
return graph
```
#### 2.1.2 最优路径规划
除了最短路径问题,最优路径规划也是路径规划中的关键问题之一。在最优路径规划中,我们不仅考虑路径的长度,还需要考虑其他因素,如代价、时间等。
##### 2.1.2.1 A*算法
A*算法是一种启发式搜索算法,用于在图中找到起点到终点的最佳路径。该算法综合考虑了路径的代价和启发式评估函数,能够高效地搜索最优路径。
```python
# Python实现A*算法
def A_star(graph, start, end):
open_list = [start]
closed_list = []
while open_list:
current_node = min(open_list, key=lambda x: graph[x]['f'])
open_list.remove(current_node)
closed_list.append(current_node)
if current_node == end:
break
for neighbor in graph[current_node]['neighbors']:
if neighbor in closed_
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面深入地探讨了 01 背包问题动态规划的方方面面。从基本原理的解析到优化解法的分析,从贪心算法的对比到实际背包装填问题的应用,从重量和价值相等情况的处理到多重背包问题的动态规划解法,专栏深入浅出地介绍了 01 背包问题动态规划的各种知识点。此外,还涉及了空间复杂度优化、选择价值最高物品策略、零钱兑换应用、剪枝优化技巧、状态转移方程分析、分组 01 背包问题、多维背包问题在生产优化中的应用、路径规划中的应用、资源分配中的实际案例、编程竞赛中的技巧应用、组合优化解决、二进制优化方法以及动态规划与回溯法结合解决 01 背包问题等内容,为读者提供了全面系统的学习资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
高效编码秘籍:Tempus Text自定义快捷操作全面解析

# 摘要
Tempus Text编辑器作为一款高效的编程工具,其快捷键功能在提升编码效率和个性化工作流中起到了关键作用。本文从自定义快捷键的基础讲起,详细探讨了Tempus Text的快捷键机制,包括原生快捷键的解析和用户自定义快捷键的步骤。进阶部分介绍了复合快捷键的创建和应用,以及快捷键与插件的协同工作,并提供了快捷键冲突的诊断与解决方法。通过实践操作演示与案例分析,展
STM32 HardFault异常终极指南:13个实用技巧揭示调试与预防策略
# 摘要
STM32微控制器中的HardFault异常是常见的系统错误之一,其发生会立即打断程序执行流程,导致系统不稳定甚至崩溃。本文首先介绍了HardFault异常的基础知识,随后深入探讨了其成因,包括堆栈溢出、中断优先级配置不当和内存访问错误等。硬件与软件层面的异常触发机制也是本文研究的重点。在此基础上,本文提出了有效的预防策略,涵盖了编
AD19快捷键高级应用:构建自动化工作流的必杀技

# 摘要
本文系统地介绍了AD19软件中快捷键的使用概览、高级技巧和自动化工作流构建的基础与高级应用。文章从快捷键的基本操作开始,详细探讨了快捷键的定制、优化以及在复杂操作中的高效应用。之后,文章转向自动化工作流的构建,阐述了工作流自动化的概念、实现方式和自动化脚本的编辑与执行。在高级应用部分,文章讲解了如何通过快捷键和自动化脚本提升工作效率,并探索了跨平台操作和协
【迁移挑战】:跨EDA工具数据迁移的深度剖析与应对策略
# 摘要
随着电子设计自动化(EDA)技术的快速发展,数据在不同EDA工具间的有效迁移变得日益重要。本文概述了跨EDA工具数据迁移的概念及其必要性,并深入探讨了数据迁移的类型、模型、挑战与风险。通过实际案例研究,文章分析了成功的迁移策略,并总结了实施过程中的问题解决方法与性能优化技巧。最后,本文展望了人工智能、机器学习、云平台和大数据技术等新兴技术对EDA数据迁移未来趋势的影响,以及标准化进程和最佳实践的发展前景。
# 关键字
跨EDA工具数
系统工程分析:递阶结构模型的案例研究与实操技巧
# 摘要
递阶结构模型作为一种系统化分析和设计工具,在多个领域内得到了广泛应用,具有明确的层次划分和功能分解特点。本文首先介绍了递阶结构模型的基本概念和理论基础,随后通过不同行业案例,展示了该模型的实际应用效果和操作技巧。重点分析了模型在设计、构建、优化和维护过程中的关键步骤,并对面临的挑战进行了深入探讨。文章最终提出了针对现有挑战的解决策略,并对递阶结构模型的未来应用和发展趋势进行了展望。本文旨在为专业实践者提供实用的理论指导和实操建议
【实时操作系统】:医疗器械软件严苛时延要求的解决方案
# 摘要
实时操作系统(RTOS)在医疗器械领域扮演着至关重要的角色,以其高可靠性和实时性保障了医疗设备的安全与效率。本文从RTOS的基础理论出发,详细讨论了硬实时与软实时的区别、性能指标、关键调度算法和设计原则。在应用层面,文章分析了医疗器械对RTOS的严格要求,并结合实际案例展示了RTOS在心电监护设备和医学影像处理中的应用。同时,文中还探讨了设计中面临的医疗标准、实时性与资源限制的挑战。技术实践章节阐述了R
快手短视频推荐系统协同过滤技术:用户与内容协同的智能算法

# 摘要
本论文全面概述了快手短视频推荐系统的关键技术与实践应用,详细介绍了协同过滤技术的理论基础,包括其原理、分类、数据处理及优缺点分析。此外,深入探讨了用户与内容协同推荐算法的设计与实践,以及推荐系统面临的技术挑战,如实时性、冷启动问题和可解释性。文章还通过案例分析,展示了短视频推荐系统的用户界面设计和成功推荐算法的实际应用。最后,展望了快手短视频推荐系统的未来发展方向,包括人工智能技术的潜在应用和推荐系统研究的新趋势。
# 关键字
短
S参数测量实战:实验室技巧与现场应用
# 摘要
S参数测量是微波工程中用于描述网络散射特性的参数,广泛应用于射频和微波电路的分析与设计。本文全面介绍了S参数测量的基础知识、实验室中的测量技巧、软件应用、现场应用技巧、高级分析与故障排除方法,以及该技术的未来发展趋势。通过对实验室和现场测量实践的详细阐述,以及通过软件进行数据处理与问题诊断的深入探讨,本文旨在提供一系列实用的测量与分析策略。此外,本文还对S参数测量技术的进步方向进行了预测,强调了教
Mike21FM网格生成功能进阶攻略:处理复杂地形的神技巧

# 摘要
本文详细介绍了Mike21FM网格生成功能,并分析了其在地形复杂性分析、网格需求确定、高级应用、优化与调试以及案例研究中的应用实践。文章首先概述了Mike21FM网格生成功能,然后深入探讨了地形复杂性对网格需求的影响,包括地形不规则性和水文动态
【UG901-Vivado综合技巧】:处理大型设计,你不可不知的高效方法

# 摘要
Vivado综合是现代数字设计流程中不可或缺的一步,它将高层次的设计描述转换为可实现的硬件结构。本文深入探讨了Vivado综合的基础理论,包括综合的概念、流程、优化理论,以及高层次综合(HLS)的应用。此外,本文还提供了处理大型设计、高效使用综合工具、解决常见问题的实践技巧。高级应用章节中详细讨论了针对特定设计的优化实例、IP核的集成与复用,以及跨时钟域设计的综合处理方
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )