负载均衡策略:PyTorch实现多GPU高效协同的技巧
发布时间: 2024-12-12 04:20:01 阅读量: 8 订阅数: 12 

论文复现:Pytorch实现VDSR
# 1. 多GPU协同计算的原理
在当今大数据和深度学习的时代,单个GPU的计算能力已经难以满足一些特定复杂模型的训练需求,因此多GPU协同计算应运而生。多GPU协同计算指的是在一个计算任务中使用多个GPU进行并行处理,以提高运算效率和处理速度。
## 1.1 GPU并行计算的优势
并行计算的优势在于能够将一个大的计算问题拆分成多个小的子问题,然后分别在不同的计算单元上同时进行计算。在深度学习模型训练过程中,这个拆分过程通常是针对网络的不同层或数据的不同批次。
## 1.2 数据并行与模型并行
多GPU协同计算主要分为两种模式:数据并行和模型并行。数据并行是指在多个GPU间复制模型,并将数据集分割成不同的部分,分别在各个GPU上进行训练,然后同步更新模型参数。模型并行则是将一个模型的不同部分分配给不同的GPU,适用于模型参数量非常大的情况。
## 1.3 同步与异步训练策略
在多GPU协同计算中,有同步和异步两种训练策略。同步策略在更新模型参数时需要等待所有参与训练的GPU都计算完成,而异步策略允许不同GPU独立更新模型参数,可能会导致模型不同步的问题。
```mermaid
graph LR
A[开始训练] --> B{数据并行/模型并行}
B -->|数据并行| C[数据分割]
B -->|模型并行| D[模型分割]
C --> E[分别在多GPU上训练]
D --> F[在多GPU上分布模型]
E --> G[参数同步]
F --> G
G --> H[完成一轮训练]
```
在下一章,我们将深入探讨如何在PyTorch框架下搭建多GPU环境,并具体介绍如何在多GPU上进行模型的训练。
# 2. ```
# 第二章:PyTorch中的多GPU模型训练基础
## 2.1 PyTorch多GPU环境的搭建
### 2.1.1 GPU硬件与PyTorch版本的兼容性检查
在开始搭建多GPU训练环境之前,首先需要确保你的GPU硬件和PyTorch版本之间是兼容的。硬件方面,NVIDIA的GPU较为普遍,需要确保其支持CUDA。可以通过NVIDIA官方网站查询GPU型号是否在支持列表中。而对于PyTorch版本,从1.x版本开始,对CUDA的支持做了大量改进,尤其是针对新硬件的兼容性。
一个兼容性检查的方法是在Python交互式环境中尝试导入`torch.cuda`模块,并查询GPU状态:
```python
import torch
print(torch.cuda.is_available()) # 应输出True,表示CUDA可用
print(torch.cuda.device_count()) # 显示可用的GPU数量
```
如果以上代码执行后输出`True`,表明GPU可用,并且`torch.cuda.device_count()`的结果表示系统中可被PyTorch调用的GPU数量。
### 2.1.2 安装CUDA与cuDNN库
在确认了GPU硬件与PyTorch版本兼容后,接下来需要安装CUDA和cuDNN库。CUDA是NVIDIA提供的并行计算平台和编程模型,而cuDNN是NVIDIA提供的深度神经网络加速库。
安装的步骤如下:
1. 访问NVIDIA官方网站,下载与你的GPU硬件和操作系统兼容的CUDA版本。
2. 下载对应的cuDNN库。
3. 解压CUDA与cuDNN,并按照官方文档进行安装。
在安装完成后,重新启动系统,并在Python环境中再次运行之前的兼容性检查代码,确认安装成功。
## 2.2 单进程多GPU模型训练
### 2.2.1 数据加载与模型并行化
在使用多GPU进行训练时,首先遇到的问题是如何将数据加载到各个GPU上,以及如何设计模型以支持并行化。数据并行化通常通过PyTorch提供的`DataLoader`来实现。针对多GPU,模型并行化需要将模型结构设计为能够在多个GPU上分割的模块。
数据加载可以使用`DataLoader`配合`torch.utils.data.TensorDataset`:
```python
from torch.utils.data import DataLoader, TensorDataset
import torch
# 假设已经有了训练数据和对应的标签
train_data = ... # 训练数据的Tensor
train_labels = ... # 训练数据的标签Tensor
dataset = TensorDataset(train_data, train_labels)
dataloader = DataLoader(dataset, batch_size=64, shuffle=True)
```
模型并行化涉及到模型内部结构的定义,例如,可以将模型分成几个部分,每个部分在独立的GPU上执行:
```python
class ModelParallel(nn.Module):
def __init__(self, device1, device2):
super(ModelParallel, self).__init__()
self.module1 = ... # 第一部分模型定义在device1上
self.module2 = ... # 第二部分模型定义在device2上
def forward(self, x):
x1 = self.module1(x.to(device1))
x2 = self.module2(x1.to(device2))
return x2
```
### 2.2.2 使用DataParallel进行模型训练
`DataParallel`是PyTorch中用于简化多GPU训练的模块。通过将模型包裹在`DataParallel`中,PyTorch能够自动将数据分配到多个GPU,并将模型复制到每个GPU上执行。
以下是一个使用`DataParallel`的例子:
```python
import torch.nn as nn
from torch.nn import DataParallel
class SimpleModel(nn.Module):
def __init__(self):
super(SimpleModel, self).__init__()
# 定义模型结构
self.layers = ...
def forward(self, x):
# 前向传播逻辑
return self.layers(x)
# 实例化模型
model = SimpleModel()
# 将模型并行化
model = DataParallel(model)
# 定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
# 训练过程
for inputs, targets in dataloader:
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, targets)
loss.backward()
optimizer.step()
```
在以上代码中,`DataParallel`对象会将`model`复制到每个GPU上,并将输入数据`inputs`分散到各个GPU上,执行模型前向传播后再将结果汇总,执行反向传播和参数更新。注意,在这个过程中需要确保优化器的参数是所有副本共享的。
## 2.3 多进程多GPU模型训练
### 2.3.1 多进程数据并行化
虽然单进程多GPU足以应对许多场景,但在面对大规模分布式训练时,多进程数据并行化是一个更加高效的解决方案。通过Python的`multiprocessing`库,可以创建多个进程,每个进程控制一组GPU。
多进程数据并行化的关键点在于进程间通信IPC(Inter-process communication),以及确保每个进程能够正确地管理各自的GPU资源。
```python
import torch.multiprocessing as mp
from torch.nn.parallel import DistributedDataParallel as DDP
def train(rank, world_size):
# 初始化进程组,使得多个进程可以协作
torch.distributed.init_process_group("nccl", rank=rank, world_size=world_size)
# 定义模型、数据加载器、损失函数和优化器
# ...
# 将模型包装在DDP中
model = DDP(model)
# 训练循环
for epoch in range(num_epochs):
# 分布式数据加载器
dataloader = DataLoader(train_dataset, batch_size=batch_size, sampler=dist_sampler)
for inputs, targets in dataloader:
# 训练逻辑
# ...
# 运行多进程训练
if __name__ == "__main__":
num_processes = 4 # 假设在4个GPU上训练
mp.spawn(train, args=(num_processes,), nprocs=num_processes, join=True)
```
在上述代码中,`DistributedDataParallel`替代了`DataParallel`以在分布式设置中使用。所有进程通过`torch.distributed.init_process_group`初始化一个进程组,在这个组内,进程间可以通过`DDP`共享模型状态和梯度。
### 2.3.2 使用DistributedDataParallel的实践
`DistributedDataParallel`(简称DDP)提供了一种高效的多进程并行训练方式,它允许跨多个进程和多个GPU进行数据和模型的并行化处理。在使用DDP时,需要正确设置进程组,每个进程应该只操作一部分数据,并且仅更新它所控制的模型副本。
创建DDP模型的基本步骤如下:
1. 使用`torch.distributed.init_process_group`初始化分布式进程组。
2. 定义模型并在每个进程中复制模型副本。
3. 将模型包裹在`DistributedDataParallel`中,指定要使用的设备(比如GPU)。
4. 每个进程读取其负责的数据批次,并对数据进行前向、反向传播和参数更新。
在DDP中进行训练的一个简化的代码示例如下:
```python
def main(rank, world_size):
# 初始化进程组
torch.distributed.init_process_group("nccl", rank=rank, world_size=world_size)
# 实例化模型并将其放置在对应的GPU上
torch.cuda.set_device(rank)
model = ... # 模型定义
model.cuda(rank)
ddp_model = DDP(model, device_ids=[rank])
# 定义损失函数和优化器
criterion = ...
optimizer = ...
for epoch in range(num_epochs):
# 分布式采样器确保每个进程加载不同的数据子集
train_sampler = DistributedSampler(train_dataset, num_replicas=world_size, rank=rank)
dataloader = DataLoader(train_dataset, batch_size=batch_size, sampler=train_sampler)
for inputs, targets in dataloader:
optimizer.zer

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 PyTorch 中的数据并行技术,提供了全面的指南,帮助读者充分利用 GPU 加速。专栏涵盖了数据并行机制、最佳实践、性能调优策略、数据加载优化、混合精度训练、模型一致性、模型并行与数据并行的对比、内存管理技巧、多 GPU 系统中的扩展性、云计算部署、负载均衡策略、生产环境最佳实践、跨节点通信延迟解决方案、序列模型并行化挑战、自定义操作并行化、梯度累积并行化、数据加载优化和梯度裁剪处理等主题。通过深入的分析和实用技巧,本专栏旨在帮助读者掌握 PyTorch 数据并行技术,从而显著提高深度学习模型的训练效率和性能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PF4000扭力控制器:新手速成秘籍】

参考资源链接:[阿特拉斯·科普柯PF4000扭力控制器中文操作手册](https://wenku.csdn.net/doc/u5wwfkf7jq?spm=1055.2635.3001.10343)
# 1. PF4000扭力控制器概述
图读天书:平断面图快速解读的5大技巧
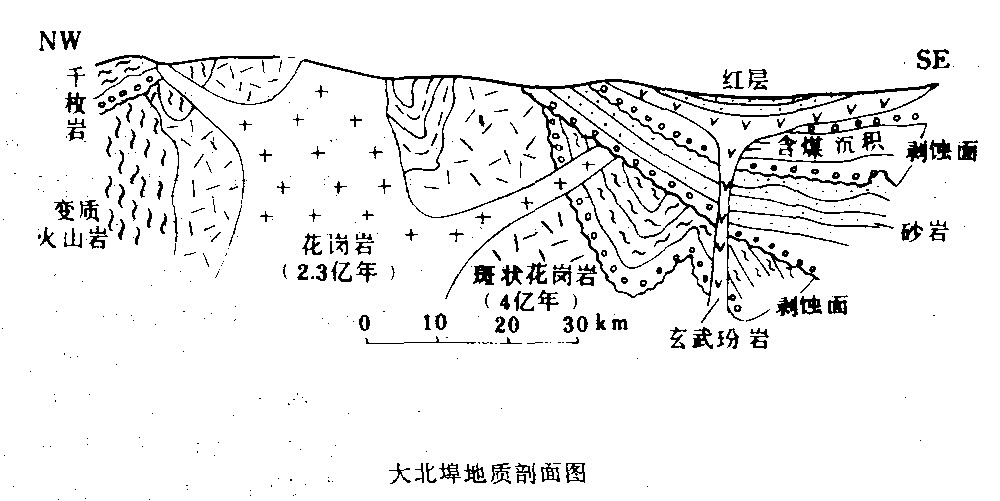
参考资源链接:[输电线路设计必备:平断面图详解与应用](https://wenku.csdn.net/doc/6dfbvqeah6?spm=1055.2635.3001.10343)
# 1. 平断面图简介及重要性
平断面图作为地质工程领域的核心工具,提供了地下结构的二维图像,是地质学家、工程师和城市规划者不可或缺的参考资料
【Java EXE安全加固】:5步为你的应用添加数字签名

参考资源链接:[Launch4j教程:JAR转EXE全攻略](https://wenku.csdn.net/doc/6401aca7cce7214c316eca53?spm=1055.2635.3001.10343)
# 1. Java EXE安全加固概述
在当今数字时代,随着恶意软件和攻击技术的日益进化,保护应用程序免受篡改、欺
【安全扭矩限制】:西门子1200V90伺服系统设置指南

参考资源链接:[西门子V90PN伺服驱动参数读写教程](https://wenku.csdn.net/doc/6412b76abe7fbd1778d4a36a?spm=1055.2635.3001.10343)
# 1. 西门子1200V90伺服系统概述
##
【隧道工程实践手册】:FLAC3D中的流-固耦合模型与支护结构设计
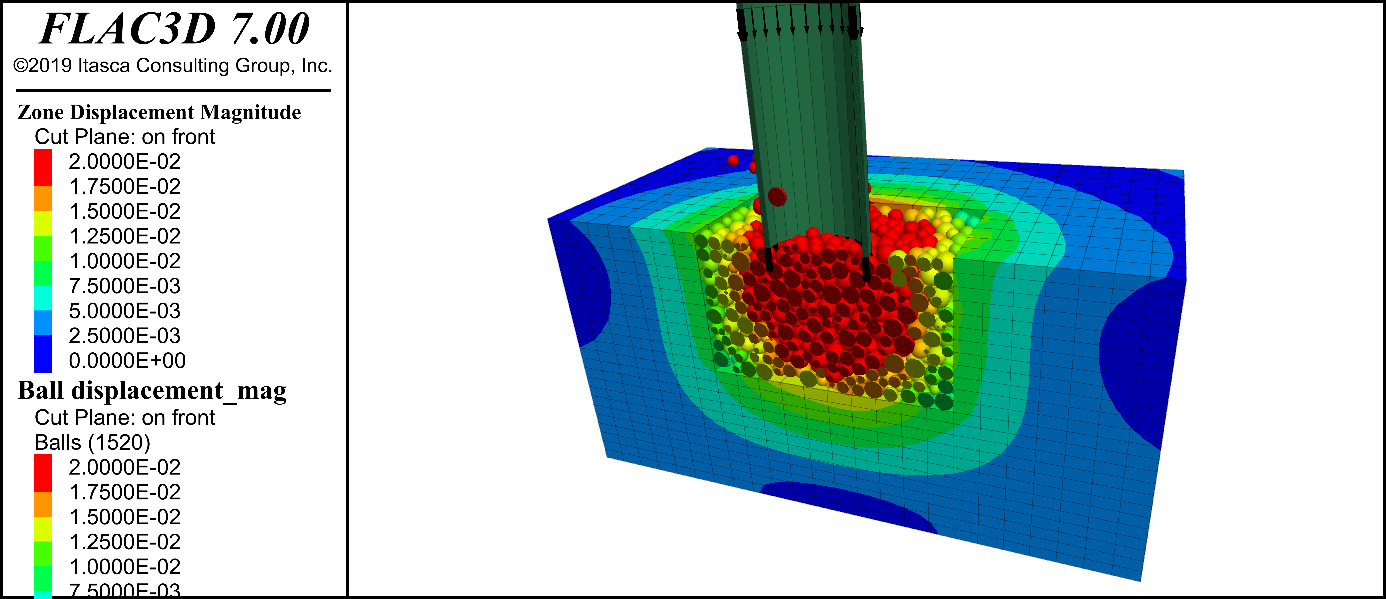
参考资源链接:[FLac3D计算隧道作业](https://wenku.csdn.net/doc/6412b770be7fbd1778d4a4c3?spm=1055.2635.3001.10343)
# 1. FLAC3D基础与流-固耦合模型概论
FLAC3D(Fast Lagrangian Analysis of Continua in 3 Dimensions)是一款广泛应用于岩土工程、地质工程
移动直播优化神技:iOS端FFmpeg应用案例全解析

参考资源链接:[iOS平台视频监控软件设计与实现——基于rtsp ffmpeg](https://wenku.csdn.net/doc/4tm4tt24ck?spm=1055.2635.3001.10343)
# 1. 移动直播的现状与挑战
## 移动直播的迅猛发展
GT-POWER振动噪声分析:诊断难题与改善策略,一步到位
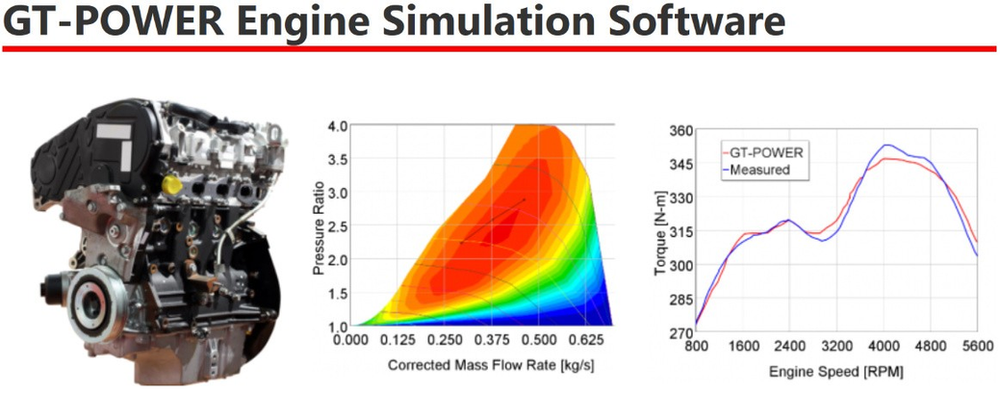
参考资源链接:[GT-POWER基础培训手册](https://wenku.csdn.net/doc/64a2bf007ad1c22e79951b57?spm=1055.2635.3001.10343)
# 1. GT-POWER振动噪声分析基础
## 概述
GT-POWER作为一款
【COMSOL仿真优化秘籍】:掌握内置参数与函数,提升模型效率与精度(专家版)
参考资源链接:[COMSOL参数与变量详解:内置函数及变量使用指南](https://wenku.csdn.net/doc/1roqvnij6g?spm=1055.2635.3001.10343)
# 1. COMSOL仿真软件概述
COMSOL Multiphysics 是一款功能强大的仿真软件,广泛应用于
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )