ROS控制器介绍:PID控制器在ROS中的应用
发布时间: 2024-03-30 04:41:07 阅读量: 122 订阅数: 93 
# 1. 什么是ROS控制器?
ROS(Robot Operating System)控制器是一种用于机器人控制的软件组件,它提供了一种灵活的方式来管理和执行机器人的控制算法。ROS控制器可以实现各种控制策略,如PID控制、运动规划等,是ROS中实现机器人动作和响应的关键组件之一。在ROS中,控制器被设计为可插拔的模块,可以根据不同的应用需求进行组合和配置。
### 1.1 ROS控制器的作用和意义
ROS控制器的主要作用是管理和执行机器人的控制算法,通过控制器可以实现机器人的运动控制、路径规划、姿态调整等功能。它提供了一种统一的接口,使得不同类型的机器人和传感器可以方便地集成和控制。同时,ROS控制器的可插拔设计也使得开发者可以针对不同的应用场景进行定制化开发,提高了控制系统的灵活性和可扩展性。
### 1.2 ROS控制器在机器人控制中的应用
ROS控制器广泛应用于各种机器人系统中,包括移动机器人、机械臂、飞行器等。通过ROS控制器,可以实现机器人的精准运动控制、避障、目标追踪等功能。同时,ROS还提供了丰富的工具和库,如MoveIt、Navigation Stack等,使得机器人控制更加便捷高效。
### 1.3 ROS控制器与传统控制器的区别
与传统的硬件控制器相比,ROS控制器具有更高的灵活性和可定制性。传统控制器通常采用固定的控制算法和硬件结构,难以满足多样化的控制需求;而ROS控制器可以轻松地实现不同控制策略的切换,同时还能与其他ROS组件无缝集成,实现更复杂的控制任务。
# 2. PID控制器简介
- 2.1 PID控制器的基本原理
- 2.2 PID控制器的优缺点
- 2.3 PID控制器在闭环控制中的应用
# 3. ROS中的PID控制器介绍
在ROS中,PID控制器是一种常见的控制器,用于实现闭环控制系统。下面将介绍ROS中PID控制器的架构,实现方法以及如何使用ROS控制器管理器管理PID控制器。
#### 3.1 ROS中PID控制器的架构
在ROS中,PID控制器通常包括三个部分:比例(Proportional)、积分(Integral)和微分(Derivative)。这三个部分分别对应控制器的三个参数:Kp、Ki和Kd。通过调节这三个参数,可以实现对系统的控制。PID控制器的架构如下:
```python
class PIDController:
def __init__(self, Kp, Ki, Kd):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.error_sum = 0
self.last_error = 0
def control(self, setpoint, feedback):
error = setpoint - feedback
self.error_sum += error
output = self.Kp * error + self.Ki * self.error_sum + self.Kd * (error - self.last_error)
self.last_error = error
return output
# 示例代码
pid = PIDController(1.0, 0.1, 0.01)
control_output = pid.control(setpoint_value, feedback_value)
```
#### 3.2 在ROS中如何实现PID控制器
在ROS中,可以通过编写一个PID控制器节点来实现PID控制器。首先需要创建一个ROS节点,然后订阅目标值和反馈值的话题,计算控制输出,并发布控制命令的话题。具体代码示例如下:
```python
import rospy
from std_msgs.msg import Float64
setpoi
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏将深入探讨在Ubuntu操作系统上安装ROS,并围绕ROS在机器人领域的应用展开系列讲解。从初识ROS,探究其在机器人领域中的价值,到ROS环境的正确搭建与版本选择,再到创建、运行第一个ROS节点和探讨消息通信机制,以及深入理解ROS中的服务调用、参数服务器管理、消息类型、数据可视化等高级话题。通过介绍常用工具和调试技巧,还将探讨ROS中的包管理、仿真环境搭建、RViz可视化自定义、PID控制器应用、导航栈解析、SLAM算法原理与实践,以及机器人运动控制等方面的知识,帮助读者全面掌握ROS在机器人开发中的应用及相关技术。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【RESTful API设计】:ecology9.0系统中的最佳实践
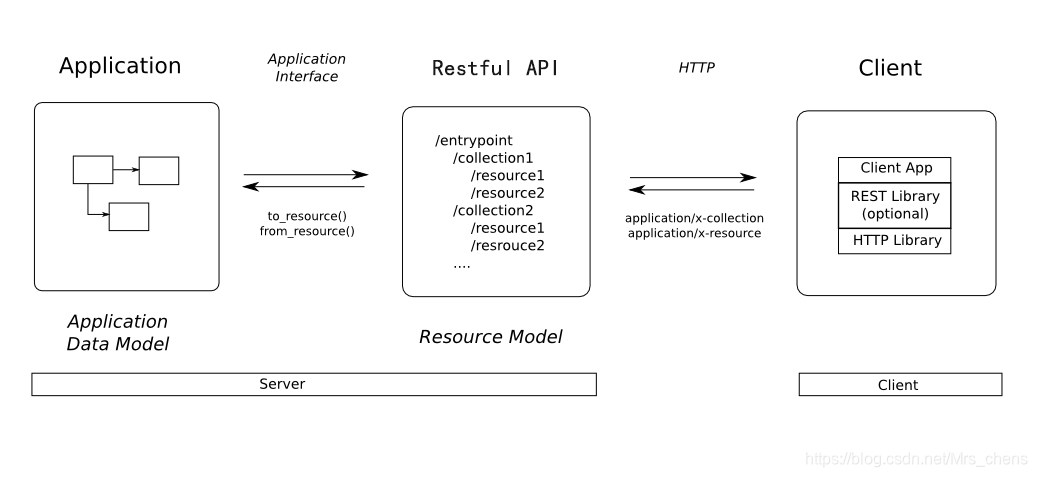
# 摘要
本文对RESTful API的设计进行了全面的概述,从设计原则、理论基础到实际应用和高级技巧,以及性能优化与扩展策略。文章首先介
【数据中心测量案例】:揭秘如何成功利用距离平方反比定律进行光辐射测量

# 摘要
本文系统探讨了距离平方反比定律在光辐射测量中的理论基础和应用实践。第一章介绍了距离平方反比定律的物理意义及其在理论上的基础。第二章详述了光辐射测量的原理、关键设备的选择以及技术要求,并探讨了该定律在实际测量中的应用和优化策略。第三章则通过数据中
【编程实践】:JavaScript文件上传功能的绝对路径获取技术总结与剖析

# 摘要
本文全面探讨了JavaScript文件上传功能的设计与实现,从基础理论、安全性、性能优化到安全性与兼容性解决方案进行了深入研究。通过分析HTTP协议、HTML5文件API以及前端事件处理技术,本文详细阐述了文件上传的技术原理和前端技术要求。同时,文章提供了获取绝对路径的实用技巧,解释了多文件处理、拖放API的使用方法,以及性能优化策略。为了应对不同浏览器的兼容性问题和提升
openTCS 5.9 报表与数据分析:深度挖掘运营数据,提升决策效率

# 摘要
本文综述了openTCS 5.9版本中的报表系统与数据分析功能。文章首先介绍了报表与数据分析的基本概念和openTCS 5.9中相应系统的概览。接着,深入探讨了报表系统的架构设计、技术选型、工具与组件选择,以及安全性与权限管理等方面。在数据分析部分,本文阐述了理论基础、数据处理技术、分析模型的构建与应用。之后,文章探讨了在实践中如何利用openTCS进行有效的报表展示、决策支持以及优化策略。最后,对报表与数
3D Mine用户教程:实例教学转子位置角,应用自如的诀窍

# 摘要
本文首先对3D Mine软件进行了全面概览,并详细介绍了其用户界面布局。随后深入探讨了转子位置角的基础知识,包括其理论基础、在采矿设计中的作用、测量和计算方法。文章进一步提供了3D Mine软件中转子位置角的操作教程,涵盖了建模、数据分析和模拟演练。为提高采矿效率,本文还探讨了转子位置角
【数据持久化解决方案】:智能编码中的数据库选择与优化

# 摘要
数据持久化是信息处理系统中的关键环节,对于保证数据的安全性、一致性和可靠性具有基础性的作用。本文首先介绍了数据持久化的重要性,随后对比了关系型数据库与非关系型数据库的优缺点,并提出了数据库选择的具体标准。关系型数据库优
BMP文件损坏检测与修复:图像处理中的错误识别技术
# 摘要
BMP文件格式因其简单性在图像处理中广泛使用,但同时也容易遭受损坏。本文首先概述了BMP文件格式及其损坏问题,随后深入探讨图像损坏的成因、类型及检测方法。基于理论基础,文章详细介绍了BMP损坏检测工具的开发过程,包括设计原则、功能实现和性能评估。进一步,本文深入研究了图像修复技术,包括修复工具的应用和未来趋势。最后,通过综合案例分析,本文展示了BMP文件损坏检测与修复的全过程,总结了修复成功的关键因素和遇到的问题的解决策略。
# 关键字
BMP文件格式;图像损坏;损坏检测;图像修复;检测算法;修复技术
参考资源链接:[BMP文件格式详解:单色-16/256色位图数据结构与显示](
《Mathematica金融工程中的应用》:算法交易与风险管理实战
# 摘要
本文全面介绍Mathematica在金融工程领域中的应用,重点探讨了其在算法交易、风险管理以及金融数据处理和可视化方面的功能和优势。通过对Mathematica核心功能的分析,以及在构建和评估量化交易模型、风险评估方法、以及数据获取和清洗等方面的具体应用,本文展示了Mathematica如何帮助金融专业人士提高工作效率和决策质量。此外,案例研
【Ubuntu系统安装教程】:一步一步带你走进Linux世界
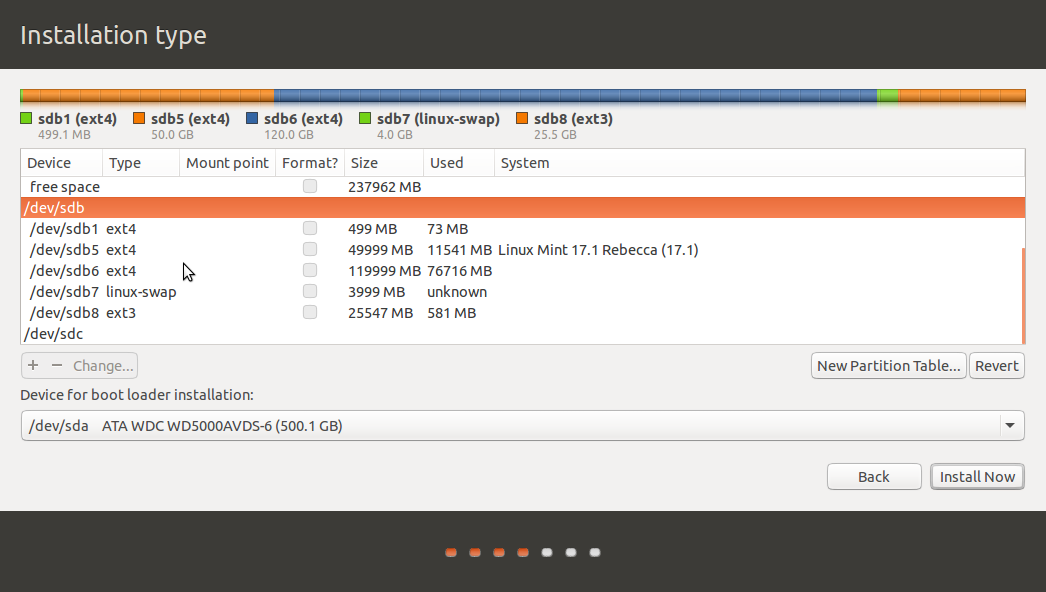
# 摘要
本文详细介绍了Ubuntu操作系统的基础知识、安装流程、初始设置和优化、基本操作使用以及进阶应用和扩展。首先,文章对Ubuntu系统进行了全面的介绍,并阐述了安装前的准备工作和安装过程的详细步骤。随后,文章深入讲解了用户账户管理、系统更新、软件管理以及性能优化的策略。在此基础上,针对Ubuntu系统的基本操作和使用,本文还提供了文件管理、个性化设置和网络配置的方法。最后,
数据同步无差错:银企直连数据一致性的保障方案
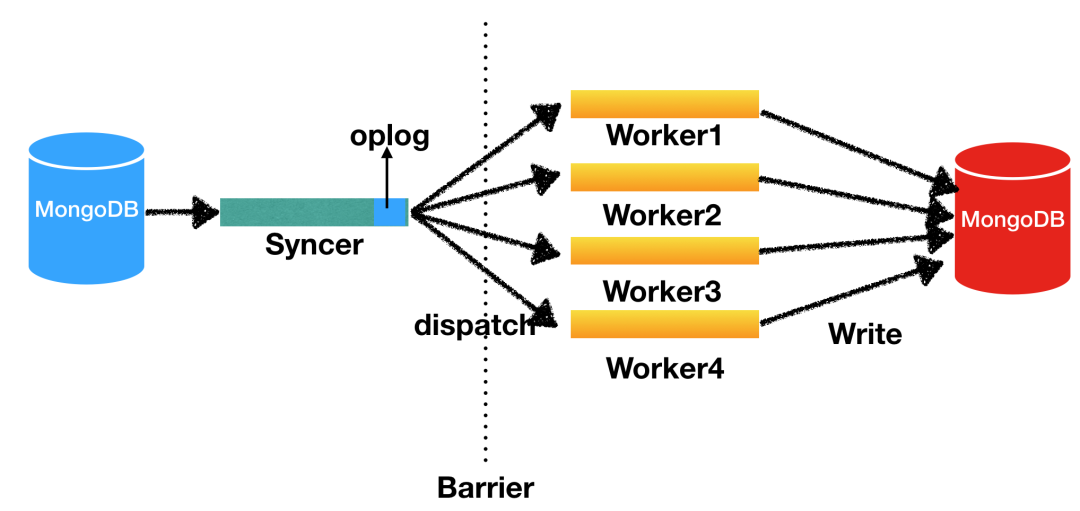
# 摘要
银企直连作为企业与银行间实现信息交互的重要通道,在保证数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )