ROS导航栈解析:实现机器人的自主导航与路径规划
发布时间: 2024-03-30 04:42:36 阅读量: 212 订阅数: 91 

基于ROS的机器人自主导航系统设计.pdf
# 1. ROS导航栈概述
ROS(Robot Operating System)是一种灵活的机器人软件框架,提供了丰富的工具和库,使开发者可以更轻松地构建各种机器人应用。ROS导航栈作为ROS中的一个重要组成部分,在实现机器人的自主导航和路径规划过程中发挥着关键作用。
## 1.1 什么是ROS导航栈
ROS导航栈是ROS中用于实现机器人自主导航和路径规划的软件包集合,包含了一系列的节点、算法和工具,可以帮助机器人在未知环境中进行路径规划、避障、定位等功能。
## 1.2 导航栈的核心组件及功能介绍
ROS导航栈的核心组件包括地图服务器(map_server)、导航功能包(navigation)、路径规划(path planning)、本地化(localization)等模块,通过这些组件的协作,实现了机器人在复杂环境中的自主导航。
## 1.3 ROS导航栈在机器人领域的应用和重要性
ROS导航栈的出现和发展,极大地推动了机器人领域的发展,使得机器人能够更加灵活地应用于各种场景,如服务机器人、仓储机器人、AGV等,提高了自主导航和路径规划的效率和准确性。
# 2. 自主导航实现流程
自主导航是机器人领域中一项重要的技术,通过使用ROS导航栈,机器人可以在未知环境中实现自主移动、避障和路径规划。以下是自主导航的实现流程及关键步骤:
### 2.1 传感器数据获取与处理
在实现自主导航过程中,机器人需要通过各种传感器获取周围环境的信息,如激光雷达、摄像头、惯性测量单元(IMU)等。这些传感器数据可以用于构建地图、定位机器人以及识别障碍物。
```python
# 传感器数据获取示例
import rospy
from sensor_msgs.msg import LaserScan
def laser_callback(data):
# 处理激光雷达数据
pass
rospy.init_node('laser_subscriber')
rospy.Subscriber('/scan', LaserScan, laser_callback)
rospy.spin()
```
### 2.2 地图构建与更新
地图是机器人导航的基础,ROS导航栈支持多种地图类型,包括二维栅格地图、三维点云地图等。地图的构建可以通过SLAM技术实现,同时需要定期更新以反映环境的实时变化。
```python
# 地图构建与更新示例
from nav_msgs.msg import OccupancyGrid
def map_callback(data):
# 更新地图信息
pass
rospy.init_node('map_subscriber')
rospy.Subscriber('/map', OccupancyGrid, map_callback)
rospy.spin()
```
### 2.3 定位算法在自主导航中的应用
机器人在未知环境中需要实现精确定位才能进行准确导航,常用的定位算法包括里程计、自适应蒙特卡洛定位(AMCL)等。这些算法可以结合传感器数据对机器人位置进行估计。
```python
# 定位算法示例(AMCL)
import rospy
from nav_msgs.msg import Odometry
from geometry_msgs.msg import PoseWithCovarianceStamped
def amcl_callback(data):
# AMCL定位算法实现
pass
rospy.init_node('amcl_subscriber')
rospy.Subscriber('/amcl_pose', PoseWithCovarianceStamped, amcl_callback)
rospy.spin()
```
### 2.4 障碍物识别与避障策略
在自主导航过程中,机器人需要及时识别周围的障碍物,并采取相应的避障策略,如

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏将深入探讨在Ubuntu操作系统上安装ROS,并围绕ROS在机器人领域的应用展开系列讲解。从初识ROS,探究其在机器人领域中的价值,到ROS环境的正确搭建与版本选择,再到创建、运行第一个ROS节点和探讨消息通信机制,以及深入理解ROS中的服务调用、参数服务器管理、消息类型、数据可视化等高级话题。通过介绍常用工具和调试技巧,还将探讨ROS中的包管理、仿真环境搭建、RViz可视化自定义、PID控制器应用、导航栈解析、SLAM算法原理与实践,以及机器人运动控制等方面的知识,帮助读者全面掌握ROS在机器人开发中的应用及相关技术。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【概率论与数理统计:工程师的实战解题宝典】:揭示习题背后的工程应用秘诀
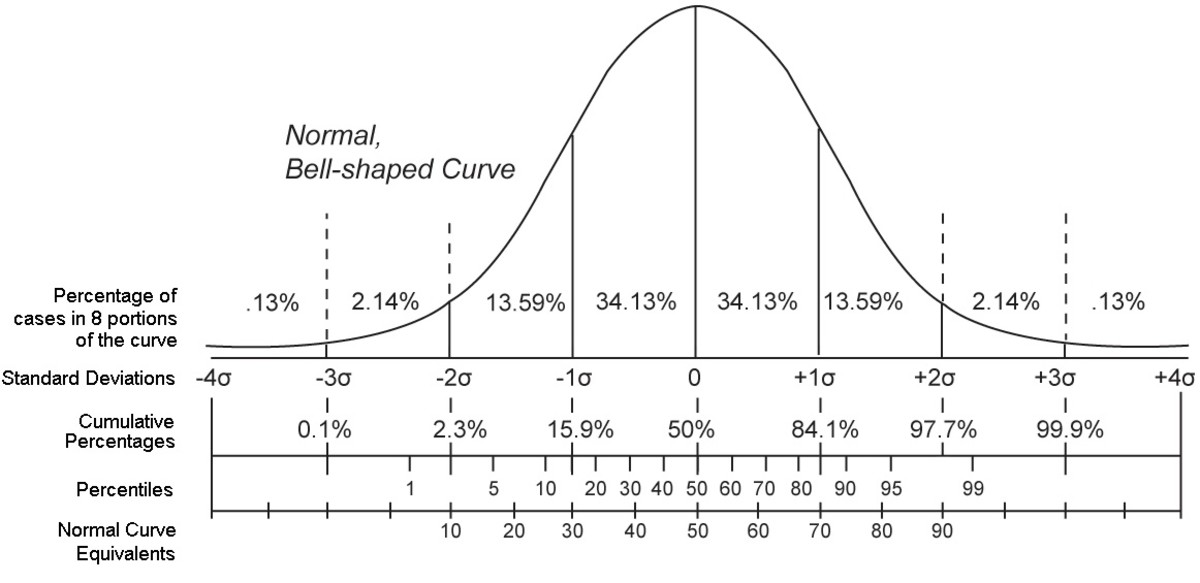
# 摘要
本文从概率论与数理统计的角度出发,系统地介绍了其基本概念、方法与在工程实践中的应用。首先概述了概率论与数理统计的基础知识,包括随机事件、概率计算以及随机变量的数字特征。随后,重点探讨了概率分布、统计推断、假设检验
【QSPr参数深度解析】:如何精确解读和应用高通校准综测工具

# 摘要
QSPr参数是用于性能评估和优化的关键工具,其概述、理论基础、深度解读、校准实践以及在系统优化中的应用是本文的主题。本文首先介绍了QSPr工具及其参数的重要性,然后详细阐述了参数的类型、分类和校准理论。在深入解析核心参数的同时,也提供了参数应用的实例分析。此外,文章还涵盖了校准实践的全过程,包括工具和设备准备、操作流程以及结果分析与优化。最终探讨了QSPr参数在系统优化中的
探索自动控制原理的创新教学方法

# 摘要
本文深入探讨了自动控制理论在教育领域中的应用,重点关注理论与教学内容的融合、实践教学案例的应用、教学资源与工具的开发、评估与反馈机制的建立以
Ubuntu 18.04图形界面优化:Qt 5.12.8性能调整终极指南

# 摘要
本文全面探讨了Ubuntu 18.04系统中Qt 5.12.8图形框架的应用及其性能调优。首先,概述了Ubuntu 18.04图形界面和Qt 5.12.8核心组件。接着,深入分析了Qt的模块、事件处理机制、渲染技术以及性能优化基
STM32F334节能秘技:提升电源管理的实用策略
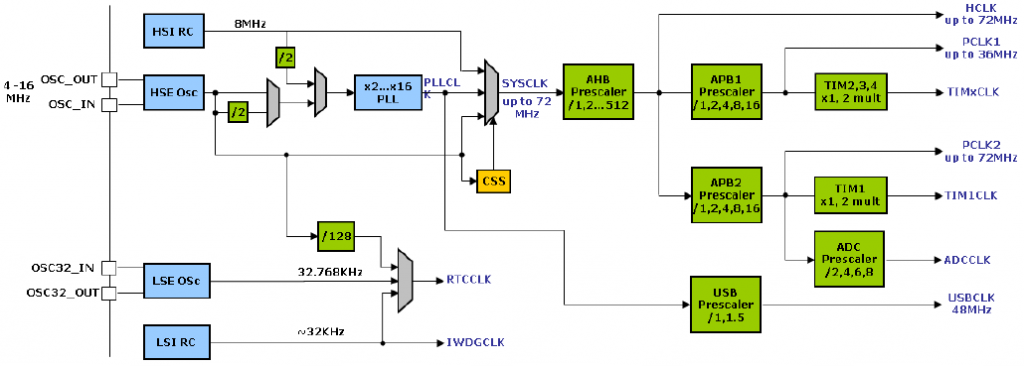
# 摘要
本文全面介绍了STM32F334微控制器的电源管理技术,包括基础节能技术、编程实践、硬件优化与节能策略,以及软件与系统级节能方案。文章首先概述了STM32F334及其电源管理模式,随后深入探讨了低功耗设计原则和节能技术的理论基础。第三章详细阐述了RTOS在节能中的应用和中断管理技巧,以及时钟系统的优化。第四章聚焦于硬件层面的节能优化,包括外围设备选型、电源管
【ESP32库文件管理】:Proteus中添加与维护技术的高效策略
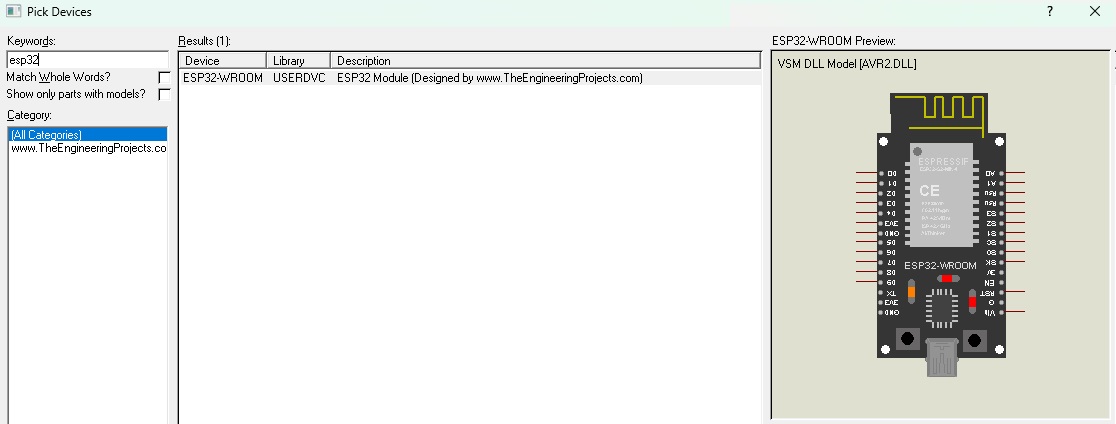
# 摘要
本文旨在全面介绍ESP32微控制器的库文件管理,涵盖了从库文件基础到实践应用的各个方面。首先,文章介绍了ESP32库文件的基础知识,包括库文件的来源、分类及其在Proteus平台的添加和配置方法。接着,文章详细探讨了库文件的维护和更新流程,强调了定期检查库文件的重要性和更新过程中的注意事项。文章的第四章和第五章深入探讨了ESP3
【实战案例揭秘】:遥感影像去云的经验分享与技巧总结

# 摘要
遥感影像去云技术是提高影像质量与应用价值的重要手段,本文首先介绍了遥感影像去云的基本概念及其必要性,随后深入探讨了其理论基础,包括影像分类、特性、去云算法原理及评估指标。在实践技巧部分,本文提供了一系列去云操作的实际步骤和常见问题的解决策略。文章通过应用案例分析,展示了遥感影像去云技术在不同领域中的应用效果,并对未来遥感影像去云技术的发
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )