【OpenCV安装指南】:Ubuntu平台的OpenCV安装全攻略
发布时间: 2024-08-14 02:10:20 阅读量: 81 订阅数: 45 

uos上编译上的opencv 4.5的库文件和头文件
# 1. OpenCV简介**
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,它为图像处理、视频分析和机器学习提供了广泛的算法和函数。OpenCV最初由英特尔开发,现在由一个活跃的社区维护,并广泛用于学术研究、商业产品和工业应用中。
OpenCV具有以下优点:
- **跨平台兼容性:**支持Windows、Linux、macOS和移动平台。
- **丰富的功能:**涵盖图像处理、视频分析、机器学习等领域。
- **开源和免费:**可供个人和企业免费使用和修改。
# 2. OpenCV安装准备
在安装OpenCV之前,需要对系统环境进行检查和准备,以确保安装过程顺利进行。
### 2.1 系统环境检查
首先,需要检查系统是否满足OpenCV的最低系统要求:
- 操作系统:Windows、Linux、macOS
- CPU:支持SSE2指令集的处理器
- 内存:至少4GB
- 硬盘空间:根据OpenCV版本和安装方式而定
### 2.2 OpenCV版本选择
OpenCV有不同的版本,每个版本都有自己的特性和支持的平台。在选择版本时,需要考虑以下因素:
- **版本稳定性:**较新的版本通常具有更多功能和更好的性能,但稳定性可能较差。
- **平台支持:**确保选择的版本支持目标操作系统。
- **依赖库:**检查所选版本所需的依赖库,并确保系统已安装这些库。
### 2.3 依赖库安装
OpenCV依赖于多个第三方库,在安装OpenCV之前,需要确保这些库已安装在系统中。常见的依赖库包括:
- **C++编译器:**如GCC、Clang
- **CMake:**用于构建OpenCV
- **Python:**用于OpenCV的Python绑定
- **NumPy:**用于图像处理
- **FFmpeg:**用于视频处理
**代码块:依赖库安装示例**
```bash
# Ubuntu系统下安装依赖库
sudo apt-get install build-essential cmake python3-dev python3-numpy ffmpeg
```
**逻辑分析:**
该代码块安装了OpenCV所需的依赖库,包括C++编译器、CMake、Python、NumPy和FFmpeg。
**参数说明:**
- `build-essential`:安装C++编译器和其他构建工具。
- `cmake`:安装CMake。
- `python3-dev`:安装Python开发头文件。
- `python3-numpy`:安装NumPy。
- `ffmpeg`:安装FFmpeg。
# 3. OpenCV安装步骤
### 3.1 源码编译安装
#### 3.1.1 下载OpenCV源码
从OpenCV官方网站下载最新版本的OpenCV源码,解压后得到`opencv`文件夹。
```bash
wget https://github.com/opencv/opencv/archive/4.6.0.zip
unzip 4.6.0.zip
```
#### 3.1.2 编译和安装
在`opencv`文件夹下创建`build`文件夹,并进入该文件夹。
```bash
mkdir build
cd build
```
使用CMake生成Makefile,指定OpenCV源码路径和安装路径。
```bash
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
```
执行make命令编译安装OpenCV。
```bash
make
make install
```
### 3.2 包管理工具安装
#### 3.2.1 Ubuntu自带的包管理工具
Ubuntu系统自带的包管理工具apt-get可以安装OpenCV。
```bash
sudo apt-get update
sudo apt-get install libopencv-dev
```
#### 3.2.2 第三方包管理工具
第三方包管理工具如conda、pip也可以安装OpenCV。
**conda安装**
```bash
conda install -c conda-forge opencv
```
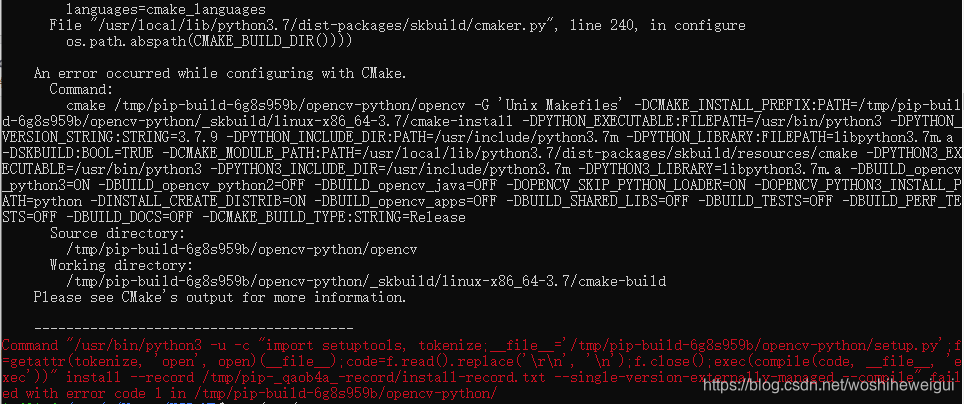
**pip安装**
```bash
pip install opencv-python
```
**安装验证**
安装完成后,可以通过以下命令验证是否安装成功:
```bash
python
import cv2
print(cv2.__version__)
```
# 4. OpenCV环境配置
### 4.1 环境变量设置
OpenCV安装完成后,需要配置环境变量,以便在系统中任何位置都可以使用OpenCV库。
**Windows系统:**
1. 打开控制面板,选择“系统和安全” > “系统” > “高级系统设置”。
2. 在“高级”选项卡中,单击“环境变量”按钮。
3. 在“系统变量”列表中,找到“Path”变量并双击它。
4. 在“变量值”字段中,添加OpenCV安装目录的bin文件夹路径。例如:`C:\opencv\build\x64\vc15\bin`。
5. 单击“确定”保存更改。
**Linux系统:**
1. 打开终端并编辑`.bashrc`文件:`nano ~/.bashrc`。
2. 在文件末尾添加以下行:
```bash
export PATH=$PATH:/usr/local/lib/opencv/bin
```
3. 保存文件并退出。
4. 运行以下命令使更改生效:`source ~/.bashrc`。
### 4.2 OpenCV模块加载
OpenCV库包含许多模块,每个模块提供不同的功能。在使用OpenCV库时,需要加载所需的模块。
**Python:**
```python
import cv2
cv2.namedWindow("Image")
cv2.imshow("Image", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**C++:**
```cpp
#include <opencv2/opencv.hpp>
using namespace cv;
int main() {
Mat image = imread("image.jpg");
namedWindow("Image");
imshow("Image", image);
waitKey(0);
destroyAllWindows();
return 0;
}
```
**Java:**
```java
import org.opencv.core.Core;
import org.opencv.core.Mat;
import org.opencv.highgui.HighGui;
public class Main {
public static void main(String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
Mat image = HighGui.imread("image.jpg");
HighGui.namedWindow("Image");
HighGui.imshow("Image", image);
HighGui.waitKey(0);
HighGui.destroyAllWindows();
}
}
```
# 5. OpenCV基本操作
### 5.1 图像读取和显示
#### 读取图像
OpenCV提供了`imread()`函数读取图像。该函数接受图像路径作为参数,并返回一个`Mat`对象,该对象代表图像数据。
```python
import cv2
# 读取图像
image = cv2.imread("image.jpg")
```
#### 显示图像
使用`imshow()`函数显示图像。该函数接受图像窗口名称和`Mat`对象作为参数。
```python
# 显示图像
cv2.imshow("Image", image)
# 等待用户按任意键关闭窗口
cv2.waitKey(0)
cv2.destroyAllWindows()
```
### 5.2 图像处理基础
#### 图像转换
OpenCV提供了多种函数来转换图像格式,例如:
- `cvtColor()`:转换图像颜色空间
- `resize()`:调整图像大小
- `flip()`:翻转图像
#### 图像算术运算
OpenCV支持图像算术运算,例如:
- `add()`:图像加法
- `subtract()`:图像减法
- `multiply()`:图像乘法
#### 图像平滑
图像平滑用于去除图像噪声。OpenCV提供了多种平滑方法,例如:
- `blur()`:高斯平滑
- `medianBlur()`:中值滤波
- `bilateralFilter()`:双边滤波
#### 图像边缘检测
边缘检测用于识别图像中的边缘。OpenCV提供了多种边缘检测算法,例如:
- `Canny()`:Canny边缘检测
- `Sobel()`:Sobel边缘检测
- `Laplacian()`:拉普拉斯边缘检测
# 6.1 图像识别与分析
图像识别与分析是计算机视觉领域的重要组成部分,OpenCV提供了丰富的图像识别和分析功能,包括:
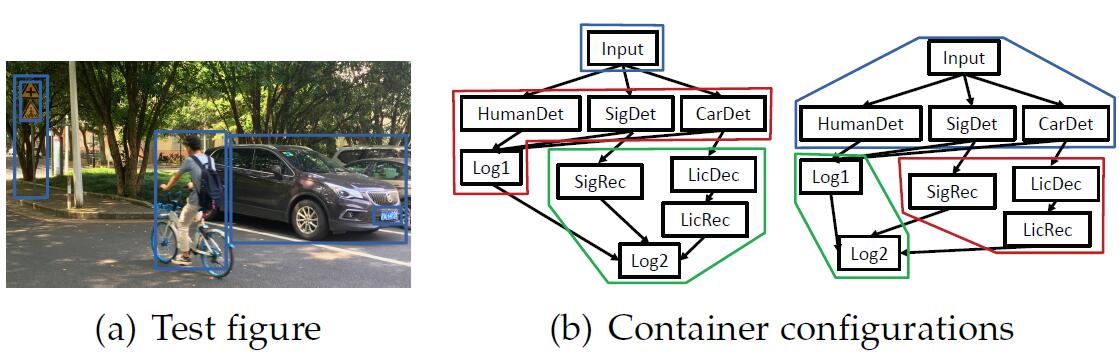
### 对象检测
对象检测是识别图像中特定对象的边界框和类别。OpenCV提供了多种对象检测算法,如:
- **Haar级联分类器:**一种基于Haar特征的快速对象检测器。
- **HOG描述符:**一种基于梯度直方图的特征描述符,用于对象检测。
- **深度学习模型:**如YOLOv5、Faster R-CNN等,提供更高的准确性和速度。
### 图像分割
图像分割将图像分割成具有相似特征的区域。OpenCV提供了以下图像分割算法:
- **阈值分割:**基于像素亮度或颜色将图像分割成二值图像。
- **区域生长:**基于相邻像素的相似性将图像分割成区域。
- **基于图的分割:**将图像表示为图,并根据像素之间的相似性进行分割。
### 特征提取
特征提取从图像中提取有意义的信息,用于识别和分类对象。OpenCV提供了多种特征提取算法,如:
- **SIFT:**尺度不变特征变换,可提取图像中不变的特征。
- **SURF:**加速稳健特征,是一种快速且稳健的特征提取器。
- **ORB:**定向快速二进制模式,是一种高效且鲁棒的特征提取器。
### 图像匹配
图像匹配在不同的图像中找到相似的区域或对象。OpenCV提供了以下图像匹配算法:
- **特征匹配:**使用特征提取器提取特征,然后匹配特征以找到相似区域。
- **模板匹配:**将一个图像作为模板,在另一个图像中搜索与模板相匹配的区域。
- **光流:**跟踪图像序列中像素的运动,以估计光流场。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 OpenCV Ubuntu 专栏!本专栏旨在为 Ubuntu 用户提供全面的 OpenCV 指南,涵盖从安装到高级图像处理技术的各个方面。
您将深入了解 OpenCV 图像增强、分割、目标检测、人脸识别、运动跟踪和深度学习等关键概念。此外,我们还提供了性能优化、疑难杂症解决、最佳实践和算法分析方面的宝贵见解。
无论您是图像处理新手还是经验丰富的专业人士,本专栏都将为您提供必要的知识和技巧,让您充分利用 OpenCV 的强大功能。从计算机视觉到工业自动化,再到安防和无人驾驶,探索 OpenCV 在各种领域中的广泛应用。通过我们的深入文章和实用示例,您将掌握 OpenCV 的精髓,并将其应用于您的项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
【S参数转换表准确性】:实验验证与误差分析深度揭秘
# 摘要
本文详细探讨了S参数转换表的准确性问题,首先介绍了S参数的基本概念及其在射频领域的应用,然后通过实验验证了S参数转换表的准确性,并分析了可能的误差来源,包括系统误差和随机误差。为了减小误差,本文提出了一系列的硬件优化措施和软件算法改进策略。最后,本文展望了S参数测量技术的新进展和未来的研究方向,指出了理论研究和实际应用创新的重要性。
# 关键字
S参
【TongWeb7内存管理教程】:避免内存泄漏与优化技巧
# 摘要
本文旨在深入探讨TongWeb7的内存管理机制,重点关注内存泄漏的理论基础、识别、诊断以及预防措施。通过详细阐述内存池管理、对象生命周期、分配释放策略和内存压缩回收技术,文章为提升内存使用效率和性能优化提供了实用的技术细节。此外,本文还介绍了一些性能优化的基本原则和监控分析工具的应用,以及探讨了企业级内存管理策略、自动内存管理工具和未来内存管理技术的发展趋
无线定位算法优化实战:提升速度与准确率的5大策略
# 摘要
本文综述了无线定位技术的原理、常用算法及其优化策略,并通过实际案例分析展示了定位系统的实施与优化。第一章为无线定位技术概述,介绍了无线定位技术的基础知识。第二章详细探讨了无线定位算法的分类、原理和常用算法,包括距离测量技术和具体定位算法如三角测量法、指纹定位法和卫星定位技术。第三章着重于提升定位准确率、加速定位速度和节省资源消耗的优化策略。第四章通过分析室内导航系统和物联网设备跟踪的实际应用场景,说明了定位系统优化实施
成本效益深度分析:ODU flex-G.7044网络投资回报率优化
# 摘要
本文旨在介绍ODU flex-G.7044网络技术及其成本效益分析。首先,概述了ODU flex-G.7044网络的基础架构和技术特点。随后,深入探讨成本效益理论,包括成本效益分析的基本概念、应用场景和局限性,以及投资回报率的计算与评估。在此基础上,对ODU flex-G.7044网络的成本效益进行了具体分析,考虑了直接成本、间接成本、潜在效益以及长期影响。接着,提出优化投资回报
【Delphi编程智慧】:进度条与异步操作的完美协调之道

# 摘要
本文旨在深入探讨Delphi编程环境中进度条的使用及其与异步操作的结合。首先,基础章节解释了进度条的工作原理和基础应用。随后,深入研究了Delphi中的异步编程机制,包括线程和任务管理、同步与异步操作的原理及异常处理。第三章结合实
C语言编程:构建高效的字符串处理函数
# 摘要
字符串处理是编程中不可或缺的基础技能,尤其在C语言中,正确的字符串管理对程序的稳定性和效率至关重要。本文从基础概念出发,详细介绍了C语言中字符串的定义、存储、常用操作函数以及内存管理的基本知识。在此基础上,进一步探讨了高级字符串处理技术,包括格式化字符串、算法优化和正则表达式的应用。
【抗干扰策略】:这些方法能极大提高PID控制系统的鲁棒性
# 摘要
PID控制系统作为一种广泛应用于工业过程控制的经典反馈控制策略,其理论基础、设计步骤、抗干扰技术和实践应用一直是控制工程领域的研究热点。本文从PID控制器的工作原理出发,系统介绍了比例(P)、积分(I)、微分(D)控制的作用,并探讨了系统建模、控制器参数整定及系统稳定性的分析方法。文章进一步分析了抗干扰技术,并通过案例分析展示了PID控制在工业温度和流量控制系统中的优化与仿真。最后,文章展望了PID控制系统的高级扩展,如
业务连续性的守护者:中控BS架构考勤系统的灾难恢复计划

# 摘要
本文旨在探讨中控BS架构考勤系统的业务连续性管理,概述了业务连续性的重要性及其灾难恢复策略的制定。首先介绍了业务连续性的基础概念,并对其在企业中的重要性进行了详细解析。随后,文章深入分析了灾难恢复计划的组成要素、风险评估与影响分析方法。重点阐述了中控BS架构在硬件冗余设计、数据备份与恢复机制以及应急响应等方面的策略。
自定义环形菜单
# 摘要
本文探讨了环形菜单的设计理念、理论基础、开发实践、测试优化以及创新应用。首先介绍了环形菜单的设计价值及其在用户交互中的应用。接着,阐述了环形菜单的数学基础、用户交互理论和设计原则,为深入理解环形菜单提供了坚实的理论支持。随后,文章详细描述了环形菜单的软件实现框架、核心功能编码以及界面与视觉设计的开发实践。针对功能测试和性能优化,本文讨论了测试方法和优化策略,确保环形菜单的可用性和高效性。最后,展望了环形菜单在新兴领域的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )