STM32 I2C驱动开发:总线通信与传感器交互的全面解析
发布时间: 2024-07-05 11:39:07 阅读量: 58 订阅数: 31 

# 1. STM32 I2C总线基础
I2C(Inter-Integrated Circuit)是一种串行通信协议,广泛用于嵌入式系统中连接微控制器和外围设备。它以其低成本、低功耗和易于使用而著称。
STM32系列微控制器内置了I2C外设,提供硬件支持,简化了I2C通信的开发。本章将介绍STM32 I2C总线的结构、时序和通信模式,为后续的驱动开发和传感器交互奠定基础。
# 2. I2C通信协议与驱动实现
### 2.1 I2C通信协议概述
#### 2.1.1 I2C总线结构和时序
I2C(Inter-Integrated Circuit)是一种串行通信协议,用于在集成电路(IC)之间进行数据传输。它采用两线式结构,包括一条数据线(SDA)和一条时钟线(SCL)。
I2C总线时序由起始位、地址位、数据位和停止位组成。起始位由SDA和SCL同时变低触发,地址位用于标识通信目标设备,数据位用于传输数据,停止位由SDA和SCL同时变高结束通信。
#### 2.1.2 I2C通信模式和寻址
I2C通信支持两种模式:主模式和从模式。主设备发起通信并控制总线,而从设备响应主设备的请求并传输数据。
I2C寻址采用7位或10位地址,由主设备发送。7位地址用于标准模式,10位地址用于快速模式和高速模式。
### 2.2 STM32 I2C驱动开发
#### 2.2.1 硬件配置和初始化
在STM32微控制器中,I2C外设通常通过GPIO引脚连接到I2C总线。硬件配置包括设置GPIO引脚为开漏模式,并配置I2C外设的时钟和控制寄存器。
```c
// I2C1 GPIO配置
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FAST;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
// I2C1外设配置
I2C_HandleTypeDef hi2c1;
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0x00;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
HAL_I2C_Init(&hi2c1);
```
#### 2.2.2 数据传输和接收
I2C数据传输和接收通过HAL库函数实现。发送数据时,使用`HAL_I2C_Master_Transmit()`函数;接收数据时,使用`HAL_I2C_Master_Receive()`函数。
```c
// 发送数据
uint8_t data[] = {0x01, 0x02, 0x03};
HAL_I2C_Master_Transmit(&hi2c1, slave_address, data, sizeof(data), 100);
// 接收数据
uint8_t data[3];
HAL_I2C_Master_Receive(&hi2c1, slave_address, data, sizeof(data), 100);
```
**参数说明:**
* `hi2c1`:I2C句柄
* `slave_address`:从设备地址
* `data`:数据缓冲区
* `size`:数据长度
* `timeout`:超时时间(毫秒)
**逻辑分析:**
* `HAL_I2C_Master_Tran

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨 STM32 单片机驱动开发的方方面面,从基础知识到高级技术,旨在帮助开发者掌握单片机开发的核心技术。专栏涵盖了 STM32 驱动开发的各个方面,包括寄存器配置、引脚配置、中断处理、时间控制、PWM 输出、串口通信、总线通信、模拟信号采集、数字信号输出、USB 连接等。通过深入浅出的讲解和实战指南,专栏旨在帮助开发者从小白成长为单片机开发大神,掌握单片机开发的精髓。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Diffie-Hellman密钥交换协议】:cryptography库的深入理解与实现

# 1. Diffie-Hellman密钥交换协议概述
Diffie-Hellman密钥交换协议是密码学中一项革命性的发明,它允许两方在公开的通信渠道上生成一个共享的秘密密钥,而无需事先共享任何敏感信息。这一协议是由Whitfield Diffie和Martin Hellman于1976年提出的,并迅速成为保障
从零开始构建邮件处理应用:rfc822库文件全攻略

# 1. 邮件处理应用概述
电子邮件作为互联网上最早也是最广泛使用的通信方式之一,早已成为商务和日常沟通的重要工具。在当今数字化时代,邮件处理应用的高效、准确性和安全性对个人和企业都至关重要。本章将介绍邮件处理应用的基础知识,包括其基本功能、关键技术和应用领域的概览。我们
wxPython图形绘制与动画效果:创建视觉冲击力的自定义元素

# 1. wxPython图形界面库基础
wxPython是一个建立在wxWidgets C++库之上的Python扩展模块,提供了跨平台的图形用户界面(GUI)支持。开发者可以利用wxPython轻松创建美观且功能丰富的桌面应用程序。本章将简要介绍wxPython的安装、基本窗口创建以及事件处理等基础知识,为之后的深入学习打下坚实基础。
## 1.1 安装wxP
【Django Forms在大型项目中的应用】:模块化与可维护性的高级策略
# 1. Django Forms 基础介绍
Django Forms是Django框架中用于处理HTML表单的组件,它提供了一套丰富的工具来渲染表单元素、处理表单数据以及验证用户输入。本章节旨在让读者快速理解Django Forms的核心功能和使用方式。
## 1.1 Django Forms简介
Dja
【pipenv故障排除全攻略】:常见问题与解决方案总结

# 1. pipenv的环境管理与安装问题
## 1.1 安装pipenv的先决条件
在开始使用pipenv之前,我们有必要确保系统中已经安装了Python和pip(Python的包管理器)。pipenv依赖于这些工具来创建虚拟环境和管理依赖项。对于不同的操作系统,安装步骤可能略有不同,但是通常,可以通过Python的包管理器pip
快速掌握Pylint:为新项目快速建立代码规范流程
# 1. Pylint简介与安装配置
Pylint 是一个广泛用于 Python 代码静态分析的工具,它可以帮助开发者发现代码中的错误,检查代码风格和代码复杂度,以及提供一些代码质量的改进建议。对于追求代码质量和一致性的开发团队而言,Pylint 是一个不可或缺的工具。
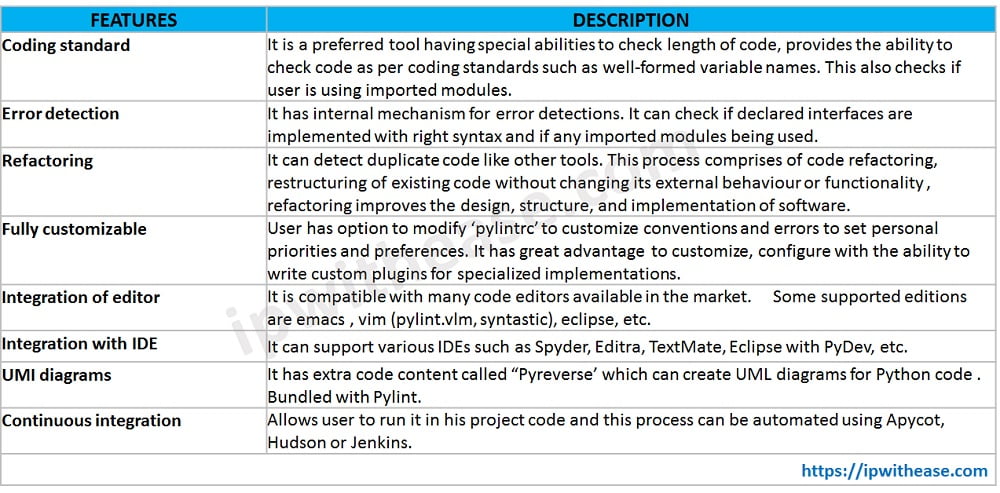
## 1.1 Pylint的功能介绍
Pylint 不仅能检查 Python 代码中的错误,还能检测代码风格的一致性、不合理的编
virtualenv环境备份与迁移:数据保护的最佳实践
# 1. virtualenv环境概述与重要性
Python 是一门非常灵活的编程语言,它的这种灵活性来源于一个庞大的标准库和丰富的第三方库。然而,随着项目依赖库数量的增加,不同项目对同一库的不同版本的需求,会引发依赖冲突。为了解决这一问题,virtualenv 应运而生,它允许你为一个项目创建一个隔离的 Python 环境。
## 1.1 virt
heapq与二叉堆:图解Python中的优先级队列操作
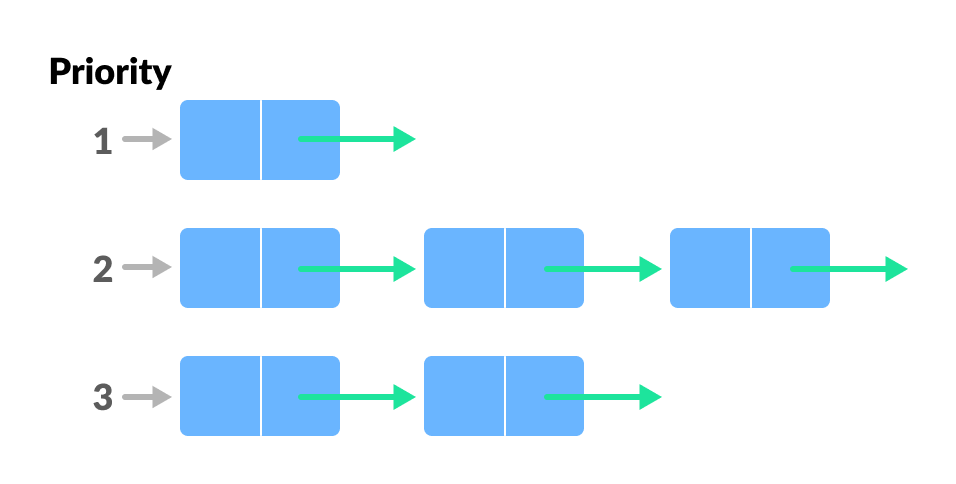
# 1. 优先级队列与二叉堆的基本概念
优先级队列是一种抽象数据类型,其中的元素都有自己的优先级。在优先级队列中,元素按照优先级从高到低的顺序被移除。它与先进先出(FIFO)的普通队列不同,因为普通队列移除元素的顺序只取决于它们进入队列的顺序。
二叉堆是优先级队列的一种实现方式,具体来说,它是一种特殊的完全二叉树。在二叉堆中,树的每一层都是完全填满的,除了可能的最后一层。二叉堆分为两种:最大堆
【Black教育应用】:培养编程新手良好习惯的10个方法
# 1. 引言:为什么需要良好编程习惯
编程是一门艺术,也是一项科学。在软件开发的历程中,良好编程习惯的重要性不亚于工程师的技术能力。它不仅关乎代码的可读性、可维护性,更与软件的生命周期和开发效率紧密相关。良好的编程习惯能够带来清晰的结构、高效的协作以及稳定的性能,最终达到提高软件质量的目的。接下来的章节,我们将深入探讨构建良好编程习惯的具体方法和实践,从基础做起
【Paramiko入门详解】:零基础学习Python远程操作库

# 1. Paramiko库简介和安装
## 1.1 Paramiko库简介
Paramiko是一个用Python编写的第三方库,用于实现SSHv2协议,提供了客户端和服务器的功能。通过Paramiko,Python程序可以实现远程SSH连接、执行命令、文件传输等操作,从而提供一种安全且
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )