【搜索算法深度解析】:广工大试卷中的关键搜索策略
发布时间: 2024-12-25 12:05:38 阅读量: 4 订阅数: 10 

2014年12月广东工业大学计算机学院软件工程试卷

# 摘要
搜索算法作为解决复杂数据结构中问题的基础工具,广泛应用于计算机科学的多个领域。本文首先对搜索算法的基本概念和经典策略进行了概述,然后深入探讨了各种搜索算法在树、哈希表和图结构中的应用及优化技术。此外,本文还讨论了搜索算法在游戏开发、Web爬虫和推荐系统等实际应用中的案例,并分析了量子搜索、机器学习与搜索算法结合等前沿研究方向,以及搜索算法在未来可能的发展趋势。通过这些内容的阐述,本文为读者提供了搜索算法全面的理论基础和应用知识,以及对搜索算法未来发展的深刻洞察。
# 关键字
搜索算法;线性搜索;二分搜索;深度优先搜索;广度优先搜索;启发式搜索;数据结构;优化技术;量子搜索算法;机器学习;跨学科应用
参考资源链接:[广工数据结构期末考试真题及答案解析](https://wenku.csdn.net/doc/w7murq9pd7?spm=1055.2635.3001.10343)
# 1. 搜索算法基础概述
搜索算法是计算机科学和软件工程中不可或缺的组成部分,用于在数据结构中寻找特定元素或路径。本章将介绍搜索算法的基本概念、分类和应用场景。
## 1.1 搜索算法的定义与重要性
搜索算法是指在一系列元素中查找特定目标值的过程。它们在许多领域中应用广泛,包括数据检索、人工智能、网络搜索和数据库查询。一个有效的搜索算法可以显著提高程序的性能和用户体验。
## 1.2 搜索算法的分类
搜索算法可以根据搜索的策略和数据结构的不同进行分类。线性搜索和二分搜索是按搜索策略分类的例子,而树结构搜索和图搜索则体现了数据结构的差异。每种算法都有其独特的适用场景和效率考量。
## 1.3 搜索算法的性能评估
在评估搜索算法的性能时,通常会考虑时间复杂度和空间复杂度。时间复杂度描述了算法执行所需时间随着输入数据量的变化关系,而空间复杂度反映了算法运行过程中所占用内存的大小。
通过对搜索算法的深入研究,我们可以更好地理解如何在实际应用中选择和实现最合适的搜索策略,以便在处理大量数据时保持效率和准确性。
# 2. 经典搜索策略的理论与实现
### 2.1 线性搜索与二分搜索算法
#### 2.1.1 线性搜索的原理和复杂度分析
线性搜索(Linear Search),也被称为顺序搜索,是最简单的搜索算法。它的基本思想是从数据结构的起始位置开始,逐个检查每个元素,直到找到目标元素或者遍历完所有元素为止。在无序数组中寻找特定值时,线性搜索是最直接的方法。
线性搜索的复杂度分析相对简单。在最好情况下,当目标元素位于数组的第一个位置时,算法只需要进行一次比较,复杂度为O(1)。在最坏的情况下,目标元素位于数组的最后一个位置或者根本不在数组中,算法需要进行n次比较,其中n为数组长度,因此其复杂度为O(n)。平均情况下,目标元素出现在数组中任意位置的概率相同,因此平均复杂度也为O(n)。
#### 2.1.2 二分搜索的适用场景和算法实现
二分搜索(Binary Search),又称为折半搜索,是一种在有序数组中查找特定元素的高效算法。其基本原理是将目标值与数组中间的元素进行比较,根据比较结果缩小搜索区间的一半,直到找到目标值或者确定目标值不存在为止。
二分搜索算法的核心思想是“分而治之”,每次都将搜索区间减半,因此它具有对数时间复杂度。具体来说,如果数组的长度为n,则最坏情况下的比较次数为log2(n),因此算法的时间复杂度为O(log n)。
下面是一个二分搜索的Python实现示例:
```python
def binary_search(arr, target):
low = 0
high = len(arr) - 1
while low <= high:
mid = (low + high) // 2
guess = arr[mid]
if guess == target:
return mid
if guess > target:
high = mid - 1
else:
low = mid + 1
return -1 # Target is not found
# Example usage:
sorted_array = [1, 2, 3, 4, 5, 6, 7, 8, 9]
target = 5
index = binary_search(sorted_array, target)
if index != -1:
print(f"Target {target} found at index {index}")
else:
print(f"Target {target} not found in the array.")
```
在上述代码中,`binary_search`函数首先确定数组的搜索范围(`low`和`high`),然后在每次迭代中通过计算中间索引来比较目标值。如果目标值等于中间值,则返回中间索引;如果目标值较小,则将搜索范围缩小到左半部分;如果目标值较大,则缩小到右半部分。这个过程会一直重复,直到找到目标值或搜索范围为空。
### 2.2 深度优先搜索(DFS)与广度优先搜索(BFS)
#### 2.2.1 DFS的递归和非递归实现
深度优先搜索(Depth-First Search,DFS)是一种用于遍历或搜索树或图的算法。这个算法会尽可能深地搜索树的分支。当节点v的所在边都已被探寻过,搜索将回溯到发现节点v的那条边的起始节点。这个过程一直进行到已发现从源节点可达的所有节点为止。
DFS可以通过递归或使用栈实现。下面是使用Python实现的DFS的递归版本:
```python
def dfs_recursive(graph, start, visited=None):
if visited is None:
visited = set()
visited.add(start)
print(start, end=' ')
for next in set(graph[start]) - visited:
dfs_recursive(graph, next, visited)
return visited
# Graph represented as an adjacency list
graph = {
'A': {'B', 'C'},
'B': {'A', 'D', 'E'},
'C': {'A', 'F'},
'D': {'B'},
'E': {'B', 'F'},
'F': {'C', 'E'}
}
dfs_recursive(graph, 'A') # Output: A C F E B D or similar
```
在非递归版本中,我们使用显式的栈来模拟递归过程。非递归版本避免了递归可能导致的栈溢出问题,特别是在图非常大的情况下。
```python
def dfs_non_recursive(graph, start):
visited = set()
stack = [start]
while stack:
vertex = stack.pop()
if vertex not in visited:
print(vertex, end=' ')
visited.add(vertex)
stack.extend(graph[vertex] - visited)
return visited
dfs_non_recursive(graph, 'A') # Output: A C F E B D or similar
```
在非递归版本中,使用了栈来存储待访问的节点。算法开始时,栈中只有一个起始节点。随后,只要栈非空,算法就从栈中弹出一个节点,并将其标记为已访问。然后算法将当前节点的所有未访问的邻居节点压入栈中。
#### 2.2.2 BFS在图遍历中的应用
广度优先搜索(Breadth-First Search,BFS)是另一种遍历或搜索树或图的算法。与DFS不同,BFS从根节点开始,探索所有邻近的节点,然后再对每一个邻近节点,探索它们的邻近节点,这个过程一直持续到所有的节点都被访问为止。
BFS需要使用队列来实现,我们从队列中取出一个节点,访问它,并将其未访问的邻居节点加入队列。以下是BFS算法的Python实现:
```python
from collections import deque
def bfs(graph, start):
visited = set()
queue = deque([start])
while queue:
vertex = queue.popleft()
if vertex not in visited:
print(vertex, end=' ')
visited.add(vertex)
queue.extend(graph[vertex] - visited)
return visited
bfs(graph, 'A') # Output: A B C D E F or similar
```
在这个实现中,我们首先创建一个空队列,并将起始节点加入队列。在队列非空的情况下,我们从队列的前端取出一个元素,访问它,并将它的所有未访问的邻居节点加入队列。这个过程一直进行,直到所有的节点都被访问。
### 2.3 启发式搜索算法
#### 2.3.1 启发式搜索的基本原理
启发式搜索算法,又称为最佳优先搜索,是一种在树或图中寻找最优路径的搜索策略。它通常用于在大搜索空间中寻找最优解的场景,比如棋类游戏或路径规划。
启发式搜索的核心思想是使用一个评估函数(也称为启发式函数)来评估哪些节点最有可能导向目标,从而优先探索这些节点。评估函数的常见形式是`f(n) = g(n) + h(n)`,其中`g(n)`是当前节点到起始节点的实际成本,而`h(n)`是当前节点到目标节点的预估成本(启发式成本)。
一个经典的启发式搜索算法是A*算法,它依赖于启发式函数的准确性来减少搜索空间和提高搜索效率。
#### 2.3.2 A*算法及其优化策略
A*算法是一种利用启发式信息来寻找从初始状态到目标状态的最短路径的算法。它结合了最好优先搜索和迪杰斯特拉算法(Dijkstra's Algorithm)的特点,使用了`f(n) = g(n) + h(n)`评估函数,其中`h(n)`是关键。
A*算法的优化策略包括:
- 启发式函数的选择:一个好的启发式函数可以显著减少搜索时间和空间。如曼哈顿距离(Manhattan distance)和欧几里得距离(Euclidean distance)常被用于网格地图中。
- 优先队列的使用:为了保持节点的正确顺序,优先队列(通常是最小堆)被用于存储待访问的节点。
- 节点评估值的存储:使用结构体或字典存储每个节点的`g(n)`, `h(n)`, 和`f(n)`值,以便快速计算和比较。
下面是A*算法的伪代码实现:
```pseudo
function A_star_search(graph, start, goal):
openSet = PriorityQueue()
openSet.add(start, f(start))
cameFrom = empty map
gScore = map with default value of Infinity
gScore[start] = 0
fScore = map with default value of Infinity
fScore[start] = heuristic_cost_estimate(start, goal)
while openSet is not empty:
current = openSet.pop_lowest_f_score_node()
if current == goal:
return reconstruct_path(cameFrom, current)
for neighbor in graph.neighbors(current):
tentative_gScore = gScore[current] + distance_between(current, neighbor)
if tentative_gScore < gScore[neighbor]:
cameFrom[neighbor] = current
gScore[neighbor] = tentative_gScore
fScore[neighbor] = gScore[neighbor] + heuristic_cost_estimate(neighbor, goal)
if neighbor not in [n for (n, f) in open
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供广东工业大学数据结构试卷的全面解析和答案。专栏内容涵盖线性表、栈、队列、树、二叉树、搜索算法、排序算法、动态规划等核心考点。通过对试卷中关键题目和解答策略的深入剖析,以及算法实现案例的实战应用,专栏旨在帮助学生深入理解数据结构的原理和应用,提升考试成绩。专栏还提供试卷要点全面解析、考点及解答等内容,为学生备考提供全方位的指导。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【BOOST升压电路全方位解析】:精通电感电容计算与选择

# 摘要
本文全面探讨了BOOST升压电路的基础知识、核心组件以及效率优化策略。首先解析了BOOST升压电路的基本概念,进而深入分析了电感和电容在电路中的作用、选择标准和计算方法,提供了详细的理论基础和实例应用。文章重点讨论了BOOST电路的工作效率,探索了提升效率的优化技术和策略,并通过实验验证了优化效果。最后,本文给出了BOOST电路设计的具体流程和案例,并介绍
【InfluxDB 2.0 入门至精通】:构建现代时间序列数据库的秘籍
# 摘要
InfluxDB 2.0作为一款先进的时序数据平台,提供了全面的数据管理和分析解决方案。本文首先概述了InfluxDB 2.0的核心特性和安装过程,随后深入讲解了基础操作,包括数据模型、写入、读取、查询以及用户权限管理。进阶特性部分,探讨了持续查询、任务自动化、告警通知以及扩展和备份策略。通过实践案例分析,文章展示了InfluxDB在实时监控、IoT数据管理和日志分析中的应用。最后,本文分享了性能调优的最佳实践,并展望了社区生态和未来的发展方向。整体而言,本文为读者提供了一个全面的InfluxDB 2.0学习和实践指南。
# 关键字
InfluxDB 2.0;时序数据;数据模型;查
MG200指纹膜组通信协议故障排除:一次性解决所有问题

# 摘要
本文全面阐述了MG200指纹膜组的通信协议,包括协议的基础知识、故障排查方法、实践故障排除以及优化和维护策略。文章首先介绍了通信协议的基本概念和MG200指纹膜组的特定通信
【Origin8.0数据导入秘籍】:掌握ASC格式导入与数据清洗,立竿见影提升效率

# 摘要
本文全面介绍了Origin软件中数据处理的核心环节,从理解ASC文件格式开始,详细解析了ASC文件
【KSOA性能优化】:系统响应速度提升的终极技巧
# 摘要
本文深入探讨了KSOA(Kubernetes Service Oriented Architecture)的性能优化策略。首先对KSOA架构的核心组件进行解析,并通过性能监控工具和案例分析对性能瓶颈进行定位。接着,探讨了KSOA性能优化的理论基础,包括性能优化原则和评估测试标准。文章详细介绍了
柯美C1070打印机秘籍:7个技巧轻松优化打印体验
# 摘要
柯美C1070打印机作为一款功能强大的办公设备,为用户提供了一系列打印设置与优化技巧,以提升打印质量和效率。本文详细介绍了如何通过调整打印分辨率、管理墨粉和纸张以及安装和更新驱动程序来优化打印设置。同时,还探讨了打印作业管理、维护与故障排除、成本控制以及个性化设置等实用技巧,旨在帮助用户实现更加高效和便捷的打印体验。文章也提供了维护和故障诊断的策略,以及如何通过设置和管理来控制打印成本,并个性化配置打印机以满足不同用户的特定需求。
# 关键字
打印机优化;打印分辨率;墨粉管理;驱动更新;打印队列;故障排除;成本控制;个性化设置
参考资源链接:[柯尼卡美能达C1070维修手册:安全
【SpringMVC视图解析】:技术内幕与最佳实践深度剖析
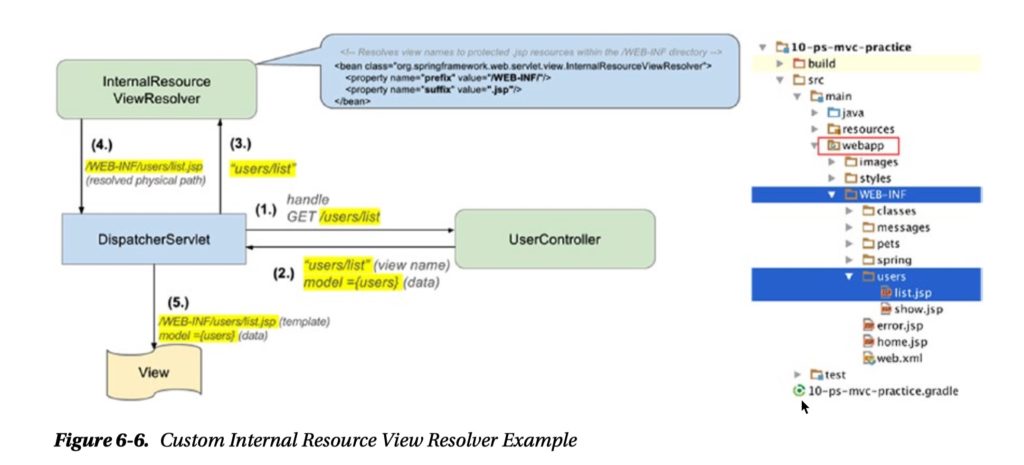
# 摘要
SpringMVC作为现代Java开发中广泛使用的Web框架,其视图解析机制是构建动态Web应用的关键组成部分。本文旨在全面概述SpringMVC的视图解析功能,从理论基础到实践应用,再到进阶技巧和最佳实践,为开发者提供系统的视图解析指南。文章首先介绍了SpringMVC的工作原理以及视图解析的核心概念,然后通过JSP、JSON和PDF等视图类型的实践案例,展示了如何在
【Z3735F与ARM处理器比较分析】:性能、功耗与应用场景的全角度对比
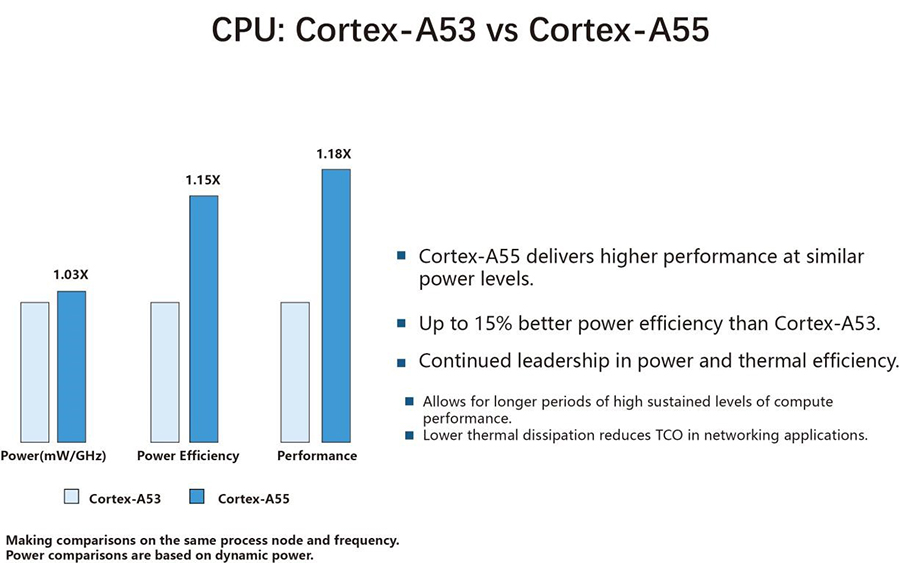
# 摘要
本论文旨在对Z3735F与ARM处理器进行全面的技术比较分析。首先,概述了Z3735F处理器与ARM架构的基本信息,为后续比较提供基础。在性能比较章节,定义了关键性能指标,并通过基准测试及应用案例展示了Z3735F与ARM处理器的性能对比结果。接着,本文探讨了两者的功耗理论和实证分析,分析了在不同工作模式下的功耗表现,并提出面向能效优
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )