速成OpenCV车距检测优化策略:精度与效率双提升
发布时间: 2024-08-14 03:20:49 阅读量: 24 订阅数: 36 

2024年OpenCV基础功能快速上手指南:图像处理与特征提取

# 1. OpenCV车距检测基础**
OpenCV(Open Source Computer Vision Library)是一个强大的开源计算机视觉库,广泛用于车距检测等任务。本节将介绍OpenCV车距检测的基础知识。
车距检测是一个计算机视觉任务,涉及确定车辆之间的距离。OpenCV提供了各种图像处理和目标识别算法,可用于构建车距检测系统。这些算法通常涉及以下步骤:
1. 图像预处理:将原始图像转换为适合车距检测的格式,包括灰度转换、噪声去除、边缘检测和轮廓提取。
2. 目标识别:使用车辆检测算法(如Haar级联分类器)识别图像中的车辆。
3. 车距计算:根据识别的车辆位置和已知的相机参数计算车辆之间的距离。
# 2. 车距检测算法优化**
车距检测算法优化是提升车距检测系统准确性和实时性的关键。本章节将探讨图像预处理和目标识别的优化策略,以增强算法的性能。
**2.1 图像预处理优化**
图像预处理是车距检测算法的基础,其目的是增强图像中车辆特征,同时去除噪声和干扰。
**2.1.1 灰度转换和噪声去除**
灰度转换将彩色图像转换为灰度图像,减少图像中的颜色信息,突出亮度信息。噪声去除可以消除图像中的椒盐噪声和高斯噪声,提高后续处理的准确性。
```python
import cv2
# 灰度转换
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 高斯滤波
blur_image = cv2.GaussianBlur(gray_image, (5, 5), 0)
# 中值滤波
median_image = cv2.medianBlur(blur_image, 5)
```
**2.1.2 边缘检测和轮廓提取**
边缘检测可以提取图像中的边缘信息,轮廓提取可以将边缘连接成闭合的区域。这些步骤有助于识别图像中的车辆。
```python
# Canny边缘检测
edges = cv2.Canny(median_image, 100, 200)
# 轮廓提取
contours, hierarchy = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
```
**2.2 目标识别优化**
目标识别是车距检测算法的核心,其目的是准确识别图像中的车辆。
**2.2.1 车辆检测算法**
车辆检测算法可以分为基于特征的算法和基于深度学习的算法。基于特征的算法使用手工设计的特征,如霍夫变换和haar特征,来识别车辆。基于深度学习的算法使用卷积神经网络(CNN)从图像中自动学习特征。
```python
# 基于特征的车辆检测
cascade_classifier = cv2.CascadeClassifier('haarcascade_cars.xml')
vehicles = cascade_classifier.detectMultiScale(gray_image, 1.1, 1)
# 基于深度学习的车辆检测
model = cv2.dnn.readNetFromCaffe('deploy.prototxt.txt', 'mobilenet_iter_73000.caffemodel')
blob = cv2.dnn.blobFromImage(gray_image, 0.007843, (300, 300), 127.5)
model.setInput(blob)
detections = model.forward()
```
**2.2.2 车辆分类和跟踪**
车辆分类可以识别不同类型的车辆,如轿车、卡车和公共汽车。车辆跟踪可以跟踪车辆在连续帧中的运动,以提高检测精度。
```python
# 车辆分类
cl
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面解析了基于 OpenCV 的车距检测技术,从原理、实现、应用到优化策略,深入浅出地阐述了车距检测的方方面面。专栏涵盖了图像处理、距离计算、算法原理、实战指南、疑难杂症解决、性能调优、目标跟踪、深度学习融合、智能交通系统应用、传感器融合、机器人导航、SLAM 技术结合、工业自动化、计算机视觉融合、医疗成像、安防监控、体育分析和虚拟现实等广泛领域。通过深入浅出的讲解和丰富的实战案例,本专栏旨在帮助读者掌握 OpenCV 车距检测技术的精髓,并将其应用于各种实际场景中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
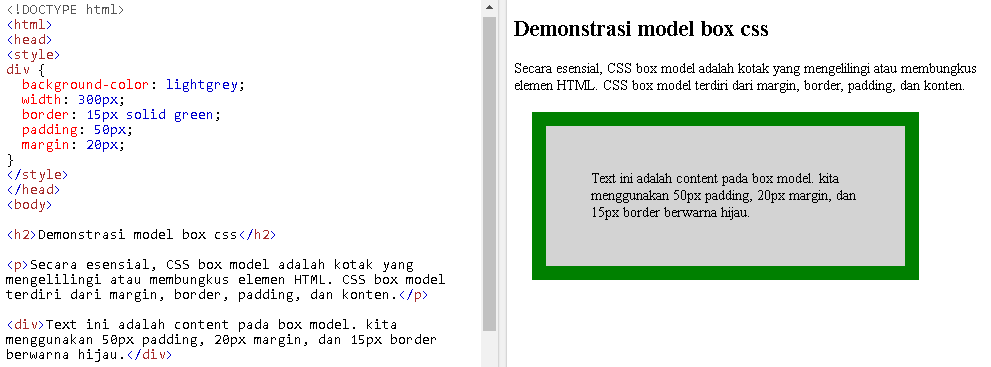
【Web设计实践】:从零开始构建花店网站布局
# 摘要
本文针对Web设计及开发的各个方面进行了系统性的阐述和实例演练,旨在指导开发者打造一个响应式、交互性强且视觉吸引人的花店网站。文章首先介绍了Web设计的基础知识和HTML5的关键特性,然后详细讨论了如何使用CSS3实现响应式设计、动画效果,以及如何通过JavaScript进行交互逻辑的构建。通过深入分析HTML结构、CSS样式和JavaScript脚本,本文展示了一个花店网站从界面设计到功能实现的完整开发流程。文章最后强调了网站实战开发中的用
【NHANES R 包编程技巧】:自定义函数与脚本优化的秘密武器
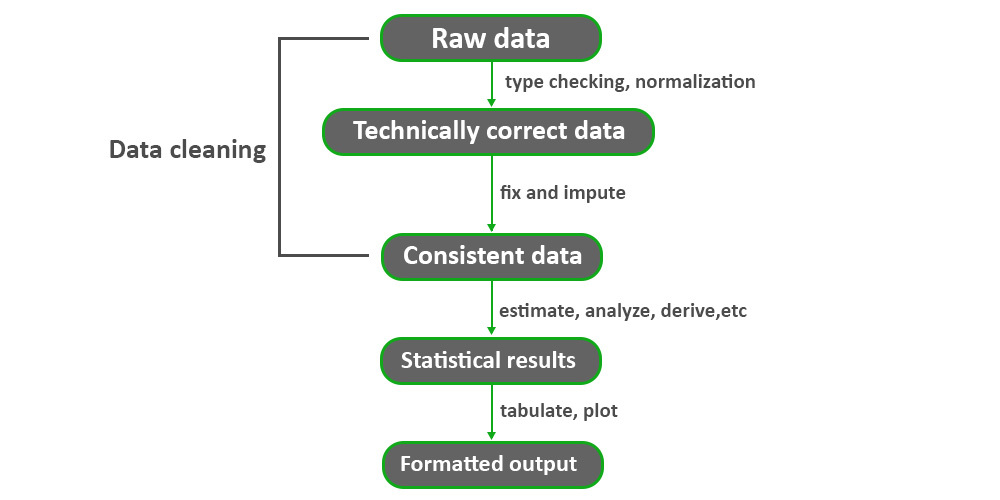
# 摘要
本文旨在为统计分析人员提供一个全面的NHANES R包使用指南,涵盖了从安装、基础知识回顾、数据分析、自定义函数编写到脚本优化的各个方面。首先,文章介绍了NHANES包的基本情况以及R语言的基础语法和数据处理方法。随后,重点放在了NHANES数据集的探索、描述性统计、可视化以及常用的数据探索技术上。接着,文章深入探讨了NHANES数据分析的实战应用,包括假
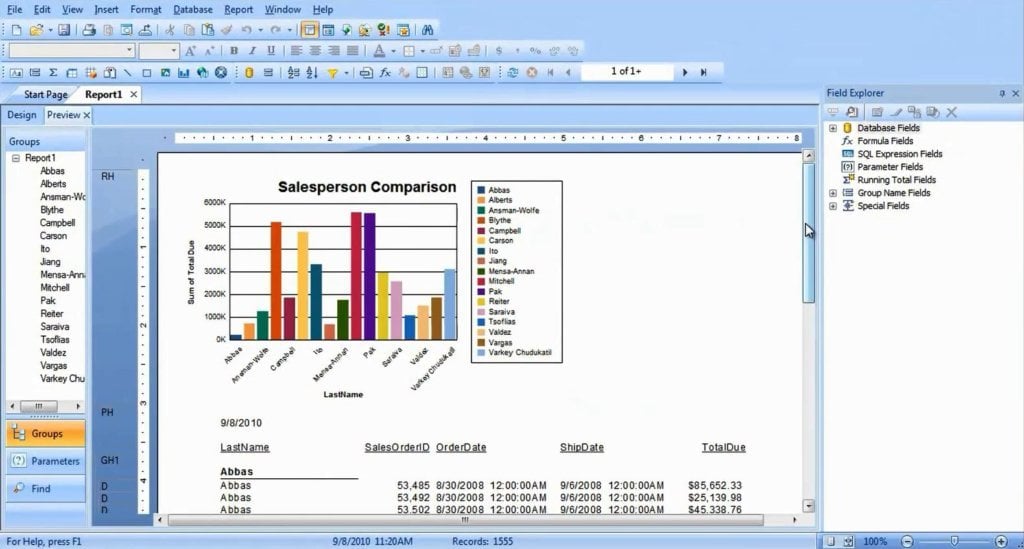
【水晶报表编程宝典】:自定义报表功能的深度解读
# 摘要
水晶报表作为一款功能强大的报表工具,广泛应用于企业数据展示和分析。本文首先介绍了水晶报表的基本概念和核心设计原理,随后深入探讨了其数据源管理、布局样式设计以及交互功能的开发。在编程技术章节,本文详细阐述了使用C#或VB.NET的编程接口、脚本控制结构以及动态数据处理的实现方式,进而讨论了高级报表功能如子报表管理和导出打印
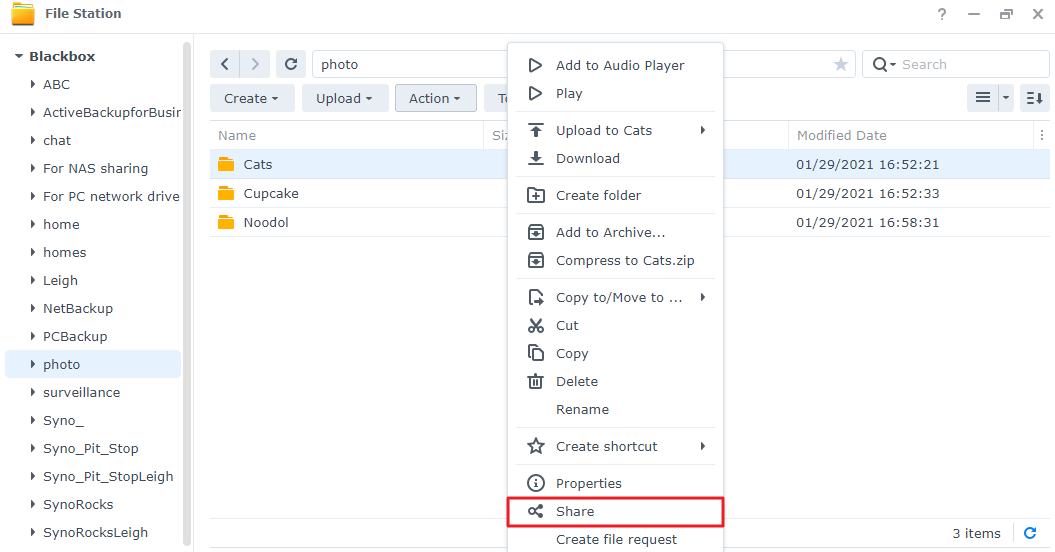
【Synology File Station API监控与日志分析】:系统稳定运行的幕后英雄,有效监控与日志分析秘籍
# 摘要
本文综合介绍了Synology File Station API在构建监控系统中的应用,以及日志分析的理论知识、工具选择和实际操作。首先概述了监控系统搭建的重要性和基于File Station API的监控组件架构。随后,探讨了监控系统实践应用中的数据收集、实时监控、告警机制和日
【单周期处理器流水线化】:理论与实现的完美结合

# 摘要
单周期处理器因其简单易实现而广泛应用于教学和基础系统中,然而它的性能存在局限性。本文首先介绍单周期处理器的基本概念和工作原理,随后探讨了单周期处理器向流水线化转型的理论基础,包括流水线技术原理、冲突解决策略、以及流水线化对性能的影响。文章进一步分析了流水线化在硬件实现和软件支持上的实践应用,以及性能评估方法。进阶应用部分着重于多级流水线、超流水线和超标量技术的设计与实现,并探讨了流水线的动态调度技术
【hwpt530.pdf实战操作手册】:如何将文档理论转化为项目成果(实战演练)
# 摘要
本文旨在提供hwpt530.pdf实战操作手册的全面概览,阐述理论基础,并指导项目规划与目标设定。通过对文档理论框架的解读,重点内容的详细剖析,以及从理论到实践目标的转化,本文帮助读者理解如何进行项目规划和管理。文章还详细介绍了实战演练的准备与实施步骤,以及如何进行问题诊断与成果评估。最后,本文强调了经验总结与知识转化的重要性,并探讨了将实践经验转化为组织知识的策略。通过这一系列的步骤,本文旨在帮助读者有效地掌握hwpt530.pdf的操作手册,并成功应用于实践项目中。
# 关键字
操作手册;理论框架;项目规划;实战演练;问题诊断;知识转化
参考资源链接:[华为PT530电力猫5
【ADS1256与STM32:终极数据采集系统指南】:专为初学者打造
# 摘要
本文旨在探讨数据采集系统的设计基础,重点分析STM32微控制器与ADS1256的集成使用,以及如何实现高精度的数据采集。文章首先介绍了ADS1256的特性及STM32微控制器的基础知识,包括硬件架构、软件开发环境和与ADS1256的接口通信。随后,文章深入探讨了ADS1256的初始化配置、数据采集方法及系统调试优化。在应用实践部分,文中展示了如何构建数据采集应用程序,并
揭秘IT策略:BOP2_BA20_022016_zh_zh-CHS.pdf深度剖析

# 摘要
本文对BOP2_BA20_022016进行了全面的概览和目标阐述,提出了研究的核心策略和实施路径。文章首先介绍了基础概念、理论框架和文档结构,随后深入分析了核心策略的思维框架,实施步骤,以及成功因素。通过案例研究,本文展示了策略在实际应用中的挑战、解决方案和经验教训,最后对策略的未来展望和持续改进方法进行了探讨。本文旨在
【VCS高效查询】:创建高效返回值查询的9个步骤与技巧

# 摘要
VCS(Version Control System)高效查询是版本控制系统优化性能和用户体验的关键技术。本文首先介绍了VCS高效查询的概念和其在软件开发过程中的重要性,随后深入探讨了VCS查询的理论基础,包括其基本原理、性能影响因素以及不同查询类型的选择方法。接着,本文详细阐述了实现VCS高效查询的设计、技术方法及调试优化实践,同时提供了实
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )