机器学习模型优化:SQP算法案例研究与实践
发布时间: 2024-12-15 07:52:50 阅读量: 5 订阅数: 6 

SQP方法.rar_SQP_SQP优化_SQP算法的实现_matlab中sqp_sqplinesearch实现
参考资源链接:[SQP算法详解:成功解决非线性约束优化的关键方法](https://wenku.csdn.net/doc/1bivue5eeo?spm=1055.2635.3001.10343)
# 1. SQP算法原理介绍
SQP(序列二次规划)算法是一种广泛应用于非线性优化问题的迭代方法。它通过构建并解决一系列二次规划子问题来求解原始问题的最优解。这些子问题基于当前的解和近似的拉格朗日函数,其中拉格朗日函数结合了原始问题的目标函数和约束条件。
在技术层面,SQP算法通过迭代更新当前解,并利用二阶导数(Hessian矩阵)或其近似值来增加解的精确度。每一步迭代都包含了搜索方向的确定和线搜索策略的应用,以确保算法的收敛性。这种方法的优点在于它的局部收敛速度快,并且能够处理各种复杂的非线性约束。
SQP算法不仅在理论研究中有着重要的地位,而且在实际应用中,它已被证明是一种高效且可靠的优化工具,特别是在工程设计、经济模型、机器学习等领域。在接下来的章节中,我们将深入探讨SQP算法的理论基础、实践应用以及未来展望与挑战。
# 2. SQP算法的理论基础
## 2.1 非线性规划基础
### 2.1.1 非线性规划问题的定义
在数学优化领域中,非线性规划(Nonlinear Programming, NLP)是一种寻找在给定一组非线性约束条件下,目标函数达到极值的变量值的方法。非线性规划问题是大多数实际应用优化问题的基础,因为现实世界的问题很少能够用线性模型精确描述。非线性规划问题可以定义为:
\[ \min_{x} f(x) \]
\[ \text{subject to} \]
\[ g_i(x) \leq 0, \quad i = 1, \ldots, m \]
\[ h_j(x) = 0, \quad j = 1, \ldots, p \]
其中 \( f(x) \) 是目标函数,\( x \) 是决策变量向量,\( g_i(x) \leq 0 \) 是不等式约束,\( h_j(x) = 0 \) 是等式约束。该问题的目标是最小化(或最大化,只需将问题转化为最小化形式)目标函数 \( f(x) \),同时满足所有的约束条件。
在机器学习中,非线性规划问题通常出现在模型参数的优化中,如神经网络的训练等。解决这类问题的方法有很多种,如梯度下降法、牛顿法、拟牛顿法等。然而,这些方法在面对有约束的非线性问题时可能不够有效。序列二次规划(Sequential Quadratic Programming, SQP)算法,作为一种有效的有约束优化方法,在工程和科学领域得到了广泛的应用。
### 2.1.2 无约束问题的优化方法
在处理有约束的非线性规划问题之前,我们首先需要了解无约束问题的优化方法。在无约束问题中,我们希望找到一个参数向量 \( x \) 使得目标函数 \( f(x) \) 达到最小值。最常见的一些无约束优化方法包括:
- **梯度下降法(Gradient Descent)**:使用目标函数的梯度信息,沿着函数值下降最快的方向进行搜索。
- **共轭梯度法(Conjugate Gradient)**:适合大规模稀疏问题,不需要存储Hessian矩阵。
- **牛顿法(Newton's Method)**:使用二阶导数(Hessian矩阵)的信息,通常会结合线搜索策略以加速收敛。
- **拟牛顿法(Quasi-Newton Methods)**:近似计算Hessian矩阵或其逆矩阵,以避免直接计算复杂的二阶导数。
无约束优化问题的解决方案通常更为简单,因为不需要考虑约束条件。然而,在实际应用中,许多问题都带有复杂的约束条件,这就需要运用更为高级的优化技术,如序列二次规划算法(SQP)。
## 2.2 序列二次规划算法的数学模型
### 2.2.1 拉格朗日乘数法基础
拉格朗日乘数法是解决带约束优化问题的一个基本工具,特别适用于等式约束。考虑如下优化问题:
\[ \min_{x} f(x) \]
\[ \text{subject to} \]
\[ h(x) = 0 \]
其中 \( f(x) \) 是目标函数,\( h(x) \) 是等式约束。拉格朗日函数 \( L \) 定义为:
\[ L(x, \lambda) = f(x) + \lambda^T h(x) \]
其中 \( \lambda \) 是拉格朗日乘子向量。根据拉格朗日乘数法,若 \( x^* \) 是原问题的一个局部最小点,则存在拉格朗日乘子向量 \( \lambda^* \),使得以下条件成立:
\[ \nabla_x L(x^*, \lambda^*) = 0 \]
\[ h(x^*) = 0 \]
这里的 \( \nabla_x L \) 表示拉格朗日函数关于 \( x \) 的梯度。通过解这个方程组,我们可以找到可能的最优解。
### 2.2.2 KKT条件与二次规划子问题
KKT条件(Karush-Kuhn-Tucker Conditions)是解决带约束优化问题的另一个重要概念,特别是对于不等式约束。KKT条件是局部最优解存在的必要条件,对于某些凸问题,还是充分条件。它包括了拉格朗日乘数法的条件,以及额外的互补松弛性和对偶间隙的条件。对于一般形式的非线性规划问题,KKT条件可以表述为:
\[ \nabla f(x) + \sum_{i=1}^{m} \lambda_i \nabla g_i(x) + \sum_{j=1}^{p} \mu_j \nabla h_j(x) = 0 \]
\[ \mu_j g_j(x) = 0, \quad j = 1, \ldots, p \]
\[ g_i(x) \leq 0, \quad h_j(x) = 0, \quad \lambda_i \geq 0, \quad \mu_j \geq 0 \]
在SQP算法中,每个迭代步骤都会求解一个二次规划子问题,该子问题是通过KKT条件构建的。这个二次规划问题通常形式如下:
\[ \min_{\Delta x} \frac{1}{2} \Delta x^T B_k \Delta x + \nabla f_k^T \Delta x \]
\[ \text{subject to} \]
\[ g_i(x_k) + \nabla g_i(x_k)^T \Delta x \leq 0, \quad i = 1, \ldots, m \]
\[ h_j(x_k) + \nabla h_j(x_k)^T \Delta x = 0, \quad j = 1, \ldots, p \]
其中 \( x_k \) 表示当前迭代点,\( B_k \) 是Hessian矩阵的近似或其一部分,而 \( \Delta x \) 是在当前迭代点的搜索方向。
## 2.3 SQP算法的迭代过程
### 2.3.1 搜索方向的确定
序列二次规划算法是一种迭代方法,每次迭代都会试图解决一个二次规划子问题来近似原始问题。迭代过程开始于一个可行点,然后在每一步,算法都试图

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
SQP算法简介专栏深入探讨了这种强大的非线性优化算法。从入门到精通,专栏提供了详细的讲解,涵盖了9大核心技巧和案例。专家分享了实例和技巧,深入解析了SQP算法的原理。专栏还揭示了提升算法效率和稳定性的秘诀,并展示了其在多目标优化、代码剖析、梯度下降法对比、大规模优化、机器学习模型优化、并行化计算、混合优化策略、动态系统优化、供应链管理和信号处理优化等领域的应用。通过深入的分析和实际案例,专栏为读者提供了全面了解和掌握SQP算法的宝贵资源。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【编程基础打造】:专升本程序设计要点全掌握!
参考资源链接:[2021广东专插本计算机基础真题及答案解析](https://wenku.csdn.net/doc/3kcsk8vn06?spm=1055.2635.3001.10343)
# 1. 编程基础概述
编程是构建现代软件技术的基石。对于初学者来说,掌握基础概念是至关重要的,这些概念包括变量、数据类型、控制流程、函数和模块化编程。理解这些概念有助于新手在掌握更高级的编程技巧之前,建立起扎实的基础知识结构。
## 1
【2.4G技术标准揭秘】:鼠标接收器应用中的权威解读

参考资源链接:[2.4G无线鼠标接收器电路解析与制作指南](https://wenku.csdn.net/doc/6412b721be7fbd1778d49343?spm=1055.2635.3001.10343)
# 1. 2.4G技术标准概述
## 2.4G技术背景与应用
2.4G技术标准是基于国际电信联盟(ITU)的2.4GHz频段开发的无线通信标准,广泛应用于无线局域网(WLAN)、蓝牙
【CMOS电路设计进阶】:5大高级技巧,提升模拟电路性能
参考资源链接:[CMOS模拟集成电路设计(Allen )课后习题解答](https://wenku.csdn.net/doc/6412b6f8be7fbd1778d48a01?spm=1055.2635.3001.10343)
# 1. CMOS电路设计基础
CMOS(互补金属氧化物半导体)技术是现代集成电路设计的核心,其电路设计基础至关重要。在这一章节
【国产化存储转变】:从传统到国产存储的4大实践指南

参考资源链接:[国产化改造实践:信创适配与数据库、中间件案例分析](https://wenku.csdn.net/doc/ghwrdq9dpg?spm=1055.2635.3001.10343)
# 1. 国产化存储的兴起背景
随着全球数据量的爆炸式增长和信息技术的快速发展,存储系统已成为支撑整个数字世界的核心基础设施。在这样的背景下,国
Python编程秘籍:282张PPT深度剖析,带你从新手到高手
参考资源链接:[Python3.5基础课件:282页全览,从入门到安装详解](https://wenku.csdn.net/doc/2b9kyex4xy?spm=1055.2635.3001.10343)
# 1. Python编程基础
Python是一种广泛使用的高级编程语言,以其可读性和简洁
SPSS与MATLAB效率对决:绘制置信区间的全面对比与优化策略
参考资源链接:[SPSS、Matlab与Sigmaplot绘制线性回归置信区间详解](https://wenku.csdn.net/doc/6412b563be7fbd1778d42f91?spm=1055.2635.3001.10343)
# 1. 统计学中的置信区间概念解析
在统计学领域,置信区间是一个非常基础且重要的概念,是研究数据并进行推断统计的重要工具。简单来说,置信区
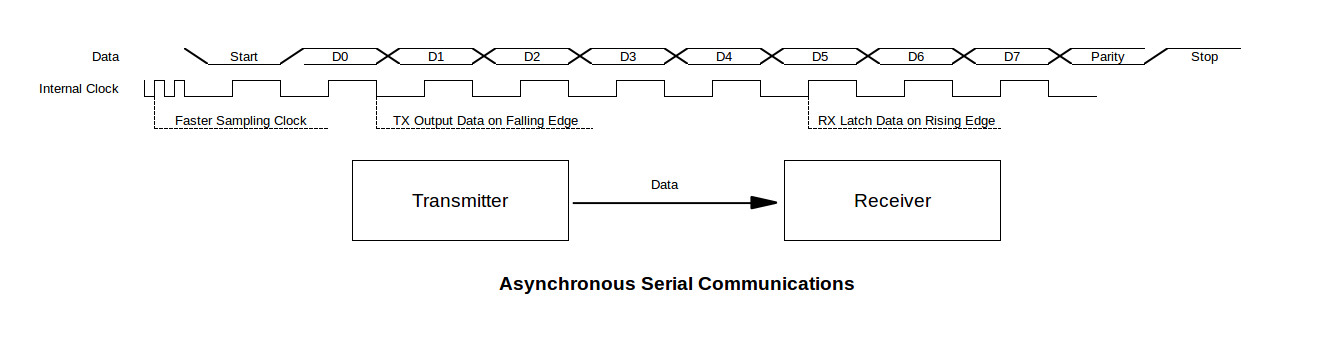
【接口信号高级应用】:实现设备间高效协同的必备技巧
参考资源链接:[西门子840DSL-NC变量与接口信号详解与安全指南](https://wenku.csdn.net/doc/5j8hswi27x?spm=1055.2635.3001.10343)
# 1. 接口信号的基本概念和原理
## 接口信号的定义与重要性
接口信号是电子设备间进行数据交换的基本语言。它们允许不同的硬件组件协同工作,实现功能的集成和信息的传递。理解接口信号的工作原理对
【精通RTKLIB 2.4.2:10大秘籍全攻略】
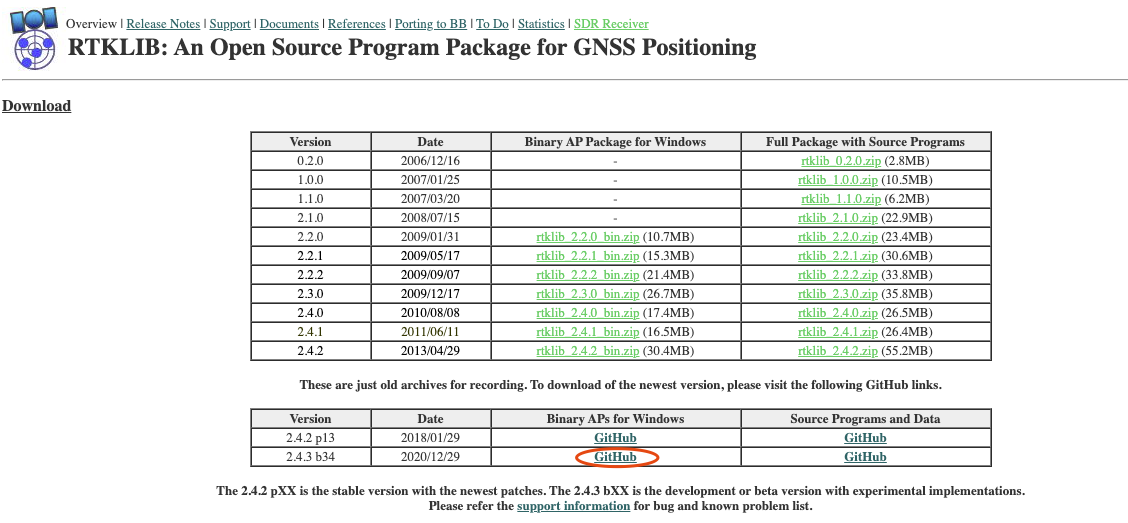
参考资源链接:[RTKLIB v2.4.2中文手册:全球导航卫星系统的精准定位](https://wenku.csdn.net/doc/6401ac0ecce7214c316ea762?spm=1055.2635.3001.10343)
# 1. RTKLIB概述与安装
## 简介
RTKLIB 是一个开源的 GPS/ GNSS 数据处理软件,广泛
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )