STM32定时器应用实战:解锁时间控制的奥秘,打造精准计时系统
发布时间: 2024-07-03 07:48:01 阅读量: 74 订阅数: 44 

STM32定时器模块:深入理解与应用指南

# 1. STM32定时器的基础知识**
STM32定时器是微控制器中不可或缺的模块,用于生成和测量时间间隔。它具有多种模式和功能,使其适用于广泛的应用,从简单的LED闪烁到复杂的实时时钟。
STM32定时器有不同的类型,包括通用定时器(TIM1-TIM17)和基本定时器(TIM6-TIM7)。通用定时器功能更丰富,支持更复杂的应用,而基本定时器更简单,适用于基本的计时需求。
STM32定时器的基本工作原理是通过一个计数器来测量时间。计数器以特定频率递增,当计数器达到预设值时,它会产生一个中断或触发一个事件。通过配置计数器的时钟源、预分频器和比较值,可以灵活地控制定时器的计时精度和分辨率。
# 2. STM32定时器编程技巧**
STM32定时器编程技巧是掌握STM32定时器应用的基础。本章将深入探讨定时器的配置、初始化、中断处理和高级应用,为读者提供全面且实用的编程指南。
**2.1 定时器配置与初始化**
**2.1.1 定时器模式和时钟源选择**
STM32定时器支持多种模式,包括向上计数、向下计数、PWM输出和捕获比较模式。选择合适的模式取决于具体应用需求。
```c
// 配置定时器1为向上计数模式
TIM1->CR1 |= TIM_CR1_DIR;
```
定时器时钟源可以是内部时钟(APB1或APB2)或外部时钟(如晶振)。选择时钟源时需考虑精度和功耗。
```c
// 选择定时器1的时钟源为APB2
TIM1->PSC = 1; // 预分频系数为1,即不分频
```
**2.1.2 预分频器和比较值设置**
预分频器用于降低定时器时钟频率,从而延长定时器溢出时间。比较值用于设置定时器溢出或捕获比较事件。
```c
// 设置定时器1的预分频系数为1000
TIM1->PSC = 1000;
// 设置定时器1的比较值,使其每1秒溢出一次
TIM1->ARR = 1000000;
```
**2.2 定时器中断处理**
**2.2.1 中断服务程序编写**
定时器中断服务程序(ISR)在定时器溢出或比较事件发生时执行。ISR应包含事件处理逻辑。
```c
void TIM1_IRQHandler(void)
{
// 清除定时器中断标志位
TIM1->SR &= ~TIM_SR_UIF;
// 执行事件处理逻辑
...
}
```
**2.2.2 中断优先级设置**
中断优先级决定了ISR的执行顺序。更高的优先级ISR会优先执行。
```c
// 设置定时器1中断的优先级为3
NVIC_SetPriority(TIM1_IRQn, 3);
```
**2.3 定时器高级应用**
**2.3.1 定时器捕获和比较功能**
定时器捕获功能可捕获外部事件的时间戳。比较功能可将捕获值与比较值进行比较,触发中断。
```c
// 配置定时器1的捕获功能
TIM1->CCER |= TIM_CCER_CC1E;
// 设置定时器1的比较值
TIM1->CCR1 = 1000;
```
**2.3.2 定时器PWM输出功能**
定时器PWM输出功能可生成可变占空比的脉冲信号。
```c
// 配置定时器1的PWM输出功能
TIM1->CCMR1 |= TIM_CCMR1_OC1M_2 | TIM_CCMR1_OC1M_1;
// 设置定时器1的PWM占空比为50%
TIM1->CCR1 = 500;
```
# 3. STM32定时器实践应用**
**3.1 LED闪烁控制**
**3.1.1 基本LED闪烁程序**
在STM32中控制LED闪烁是一个常见的应用场景。通过配置定时器,我们可以实现LED的周期性闪烁。以下是一个基本LED闪烁程序:
```c
#include "stm32f10x.h"
int main(void)
{
// 初始化GPIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
// 初始化定时器
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Prescaler = 7200 - 1; // 72MHz / 7200 = 10kHz
TIM_TimeBaseStructure.TIM_CounterMode = TIM_Cou
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**STM32单片机专栏**
本专栏深入剖析STM32单片机,揭开嵌入式世界的奥秘。从入门指南到高级应用,涵盖STM32架构、GPIO编程、定时器、中断、串口、ADC/DAC、DMA、SPI、CAN总线、LCD显示、RTC时钟、PWM、FreeRTOS、CubeMX工具、Bootloader设计、电源管理和安全特性等方方面面。
通过深入浅出的讲解和实战案例,专栏旨在帮助读者掌握STM32单片机的核心原理和应用技巧,解锁嵌入式开发的无限可能。无论是初学者还是经验丰富的工程师,都能从本专栏中受益匪浅,提升嵌入式系统设计和开发能力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【跨模块协同效应】:SAP MM与PP结合优化库存管理的5大策略

# 摘要
本文旨在探讨SAP MM(物料管理)和PP(生产计划)模块在库存管理中的核心应用与协同策略。首先介绍了库存管理的基础理论,重点阐述了SAP MM模块在材料管理和库存控制方面的作用,以及PP模块如何与库存管理紧密结合实现生产计划的优化。接着,文章分析了SAP MM与PP结合的协同策略,包括集成供应链管理和需求驱动的库存管理方法,以减少库存
【接口保护与电源管理】:RS232通信接口的维护与优化
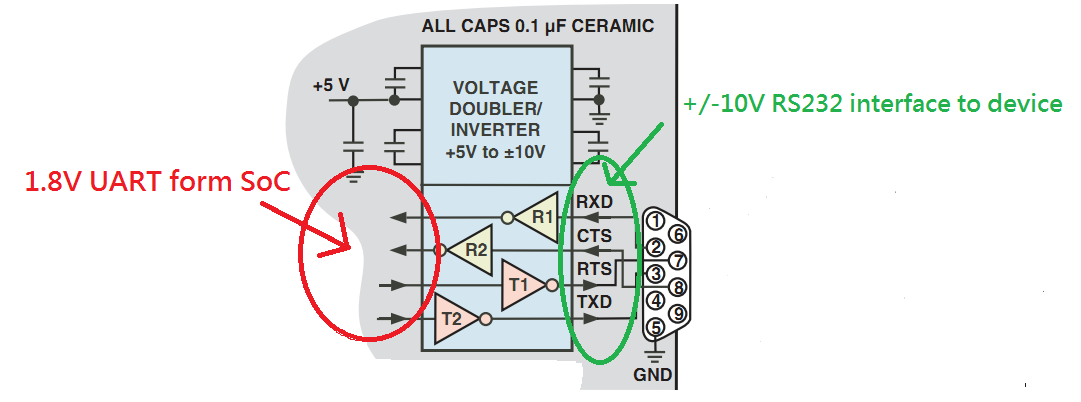
# 摘要
本文全面探讨了RS232通信接口的设计、保护策略、电源管理和优化实践。首先,概述了RS232的基本概念和电气特性,包括电压标准和物理连接方式。随后,文章详细分析了接口的保护措施,如静电和过电压防护、物理防护以及软件层面的错误检测机制。此外,探讨了电源管理技术,包括低功耗设计和远程通信设备的案例
零基础Pycharm教程:如何添加Pypi以外的源和库

# 摘要
Pycharm作为一款流行的Python集成开发环境(IDE),为开发人员提供了丰富的功能以提升工作效率和项目管理能力。本文从初识Pycharm开始,详细介绍了环境配置、自定义源与库安装、项目实战应用以及高级功能的使用技巧。通过系统地讲解Pycharm的安装、界面布局、版本控制集成,以及如何添加第三方源和手动安装第三方库,本文旨在帮助读者全面掌握Pycharm的使用,特
【ArcEngine进阶攻略】:实现高级功能与地图管理(专业技能提升)

# 摘要
本文深入介绍了ArcEngine的基本应用、地图管理与编辑、空间分析功能、网络和数据管理以及高级功能应用。首先,本文概述了ArcEngine的介绍和基础使用,然后详细探讨了地图管理和编辑的关键操作,如图层管理、高级编辑和样式设置。接着,文章着重分析了空间分析的基础理论和实际应用,包括缓冲区分析和网络分析。在此基础上,文章继续阐述了网络和数据库的基本操作
【VTK跨平台部署】:确保高性能与兼容性的秘诀

# 摘要
本文详细探讨了VTK(Visualization Toolkit)跨平台部署的关键方面。首先概述了VTK的基本架构和渲染引擎,然后分析了在不同操作系统间进行部署时面临的挑战和优势。接着,本文提供了一系列跨平台部署策略,包括环境准备、依赖管理、编译和优化以及应用分发。此外,通过高级跨平台功能的
函数内联的权衡:编译器优化的利与弊全解
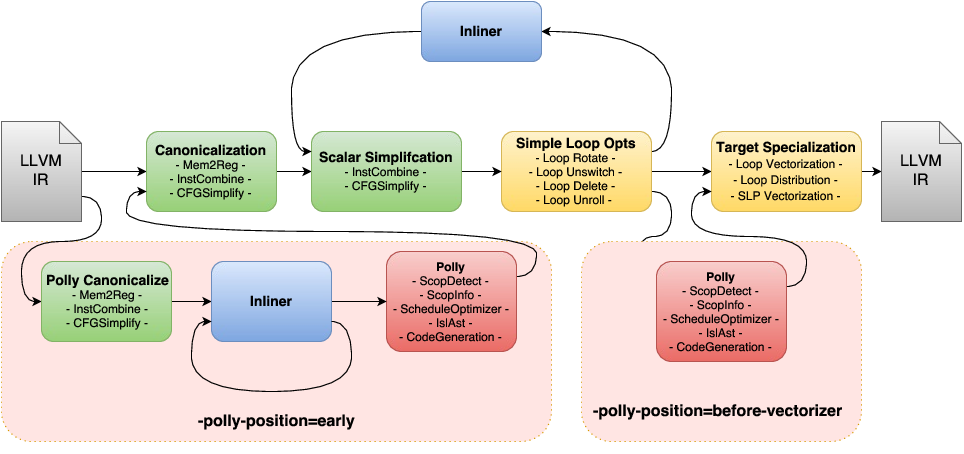
# 摘要
函数内联是编译技术中的一个优化手段,通过将函数调用替换为函数体本身来减少函数调用的开销,并有可能提高程序的执行效率。本文从基础理论到实践应用,全面介绍了函数内联的概念、工作机制以及与程序性能之间的关系。通过分析不同编译器的内联机制和优化选项,本文进一步探讨了函数内联在简单和复杂场景下的实际应用案例。同时,文章也对函数内联带来的优势和潜在风险进行了权衡分析,并给出了相关的优化技
【数据处理差异揭秘】

# 摘要
数据处理是一个涵盖从数据收集到数据分析和应用的广泛领域,对于支持决策过程和知识发现至关重要。本文综述了数据处理的基本概念和理论基础,并探讨了数据处理中的传统与现代技术手段。文章还分析了数据处理在实践应用中的工具和案例,尤其关注了金融与医疗健康行业中的数据处理实践。此外,本文展望了数据处理的未来趋势,包括人工智能、大数据、云计算、边缘计算和区块链技术如何塑造数据处理的未来。通过对数据治理和
C++安全编程:防范ASCII文件操作中的3个主要安全陷阱

# 摘要
本文全面介绍了C++安全编程的核心概念、ASCII文件操作基础以及面临的主要安全陷阱,并提供了一系列实用的安全编程实践指导。文章首先概述C++安全编程的重要性,随后深入探讨ASCII文件与二进制文件的区别、C++文件I/O操作原理和标准库中的文件处理方法。接着,重点分析了C++安全编程中的缓冲区溢出、格式化字符串漏洞和字符编码问题,提出相应的防范
时间序列自回归移动平均模型(ARMA)综合攻略:与S命令的完美结合
# 摘要
时间序列分析是理解和预测数据序列变化的关键技术,在多个领域如金融、环境科学和行为经济学中具有广泛的应用。本文首先介绍了时间序列分析的基础知识,特别是自回归移动平均(ARMA)模型的定义、组件和理论架构。随后,详细探讨了ARMA模型参数的估计、选择标准、模型平稳性检验,以及S命令语言在实现ARMA模型中的应用和案例分析。进一步,本文探讨了季节性ARMA模
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )