深入STM32 PWM控制:5大策略教你高效实现波形调整
发布时间: 2024-12-22 14:06:39 阅读量: 7 订阅数: 6 

STM32 PWM波形输入捕获测频率及占空比
# 摘要
PWM(脉冲宽度调制)控制技术是微控制器应用中一种重要的信号处理方法,尤其在STM32微控制器上得到了广泛应用。本文首先概述了PWM控制的基本概念,介绍了PWM的工作原理、关键参数以及与微控制器的交互方式。接着,本文深入探讨了PWM波形调整的实践技巧,包括硬件定时器配置、软件算法应用,以及调试与优化的策略。文章进一步阐述了PWM控制在进阶应用中的表现,如多通道同步输出、高级调制技术以及故障诊断与处理。最后,本文讨论了集成开发环境下PWM编程的工具使用和最佳实践,为PWM控制技术的工程应用提供了全面的指导。
# 关键字
PWM控制;STM32;脉冲宽度调制;定时器配置;故障诊断;集成开发环境
参考资源链接:[STM32全桥PWM:任意角度移相实现详解](https://wenku.csdn.net/doc/6401abc6cce7214c316e9762?spm=1055.2635.3001.10343)
# 1. STM32 PWM控制概述
STM32微控制器以其高性能、灵活性和易用性成为许多嵌入式应用的首选。脉冲宽度调制(PWM)是一种广泛应用于控制电机速度、调节灯光亮度和生成模拟信号的技术。STM32通过其定时器的高级功能,提供了强大的PWM控制能力,使得开发者能够轻松实现复杂的PWM应用。
在本章中,我们将简单介绍STM32及其PWM控制的基本概念,并展望后续章节将深入探讨的PWM理论基础、实践技巧、进阶应用以及集成开发环境下的编程方法。理解PWM在STM32中的实现,将有助于提高嵌入式系统的性能和效率。
# 2. ```
# 第二章:PWM控制的理论基础
## 2.1 PWM的工作原理
### 2.1.1 脉冲宽度调制的定义
脉冲宽度调制(Pulse Width Modulation, PWM)是一种模拟信号通过数字输出的方式进行控制的技术。通过改变脉冲的宽度来模拟不同的电压和功率级别,通常用于控制电机速度、调节LED亮度或进行电源管理等。PWM信号包含高电平和低电平两个状态,在一个周期内,高电平持续的时间与周期的比值被称为占空比。通过改变占空比,可以在负载上模拟不同幅度的电压。
### 2.1.2 PWM信号的特性分析
PWM信号的特性主要由以下几个参数决定:
- **周期(T)**:一个完整PWM波形的周期,通常由频率(f)决定,T=1/f。
- **占空比(D)**:在一个周期内,高电平所占的时间比例,计算公式为D=T_high/T,其中T_high是高电平的持续时间。
- **频率(f)**:周期的倒数,表示单位时间内周期重复的次数。
- **分辨率**:表示占空比可表示的最小单位,取决于周期内可分割的部分,如8位分辨率意味着周期可以分割成256个部分。
## 2.2 PWM技术的关键参数
### 2.2.1 占空比的概念和影响
占空比是PWM信号中最关键的参数之一,它直接影响到控制对象的平均功率输出。例如,在电机控制中,通过改变占空比,可以精确控制电机的转速;在LED调光应用中,占空比的大小决定了LED的亮度。
### 2.2.2 频率的作用及调整方法
PWM信号的频率决定了信号变化的速度。一个较高的频率可以减少电流的噪声,并且在某些应用中还可以减少电磁干扰(EMI)。在调整PWM信号的频率时,需要考虑到系统的响应时间和滤波器的设计,确保系统能够平滑响应PWM的变化,同时避免引入过多的噪声。
## 2.3 PWM与微控制器的交互
### 2.3.1 STM32中的定时器和PWM模式
STM32微控制器提供了灵活的定时器配置,可以生成精确的PWM波形。定时器可以配置为PWM模式,通过设置适当的预分频器和计数器来控制PWM的频率和占空比。STM32的定时器还可以在高级控制定时器模式下运行,支持死区生成和互补输出等功能。
### 2.3.2 中断和DMA在PWM中的应用
在STM32中,中断和直接内存访问(DMA)可以用来提高PWM应用的效率。当中断用于定时器更新事件时,可以在不占用CPU资源的情况下,周期性地更新PWM参数。而DMA则可以在不需要CPU干预的情况下,完成数据的快速传输,使得PWM波形可以实时调整,优化系统性能。
```c
// 示例代码:配置STM32的定时器输出PWM信号
// 以下是定时器初始化和PWM配置的伪代码示例
// 需要包含适当的库文件和定义
void TIM_PWM_Init(void) {
// 1. 使能GPIO和定时器的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIMx, ENABLE); // 替换TIMx为具体定时器
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOx, ENABLE); // 替换GPIOx为具体的GPIO端口
// 2. 配置GPIO为复用推挽输出模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x; // 替换GPIO_Pin_x为具体引脚号
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOx, &GPIO_InitStructure);
// 3. 将引脚与定时器复用功能映射
GPIO_PinAFConfig(GPIOx, GPIO_PinSourcex, GPIO_AF_TIMx); // 替换GPIO_PinSourcex为具体的映射源,GPIO_AF_TIMx为定时器复用功能
// 4. 配置定时器的PWM模式
TIM_OCInitTypeDef sConfigOC = {0};
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0; // 初始占空比设置为0
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
TIM_OCInit(TIMx, &sConfigOC);
// 5. 启动PWM信号输出
TIM_Cmd(TIMx, ENABLE);
}
```
在上述代码中,我们首先使能了对应的GPIO和定时器时钟,然后配置了GPIO为复用推挽输出模式,并将引脚映射到了定时器的复用功能上。接下来配置了定时器的PWM模式,并启动了PWM信号的输出。每个步骤都有详细的注释,帮助理解代码逻辑和STM32库函数的使用方法。
# 3. PWM波形调整的实践技巧
在现代的嵌入式系统中,脉冲宽度调制(PWM)是一种常见的技术,它广泛应用于电机控制、照明调光、信号生成等领域。掌握PWM波形调整的实践技巧,对于工程师来说至关重要,因为这直接影响到产品的性能和效率。
## 3.1 硬件定时器的配置与调整
要生成PWM波形,首先要配置硬件定时器。在STM32微控制器中,定时器不仅负责时间基准,还能够生成各种复杂的波形,包括PWM。
### 3.1.1 定时器的初始化设置
在配置STM32的定时器之前,需要确定PWM频率和分辨率。一般而言,定时器的预分频器(Prescaler)和自动重载寄存器(Auto-reload register)的值用于确定PWM的频率和分辨率。
```c
// 示例代码:初始化定时器以生成PWM信号
#include "stm32f1xx_hal.h"
void MX_TIM3_Init(void)
{
TIM_HandleTypeDef htim3;
TIM_OC_InitTypeDef sConfigOC = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = (uint32_t)((SystemCoreClock / 2) / 1000000) - 1; // 预分频器值
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 1000 - 1; // 自动重载值,决定PWM频率
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
// 配置PWM模式
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; // 初始占空比设置
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef *htim)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(htim->Instance==TIM3)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_6; // PWM输出引脚
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
```
在上述代码中,`MX_TIM3_Init`函数用于初始化TIM3定时器,用于PWM波形的生成。这里使用了预分频器和自动重载值来设定PWM的频率。PWM的频率计算公式为:
\[ f_{PWM} = \frac{f_{clock}}{(Prescaler + 1) \times (Period + 1)} \]
其中,`f_{clock}`是定时器的时钟源频率。在初始化定时器后,还需要对PWM通道进行配置。
### 3.1.2 PWM波形生成的参数配置
在生成PWM波形时,我们最关心的是占空比。占空比是PWM信号高电平持续时间与整个周期时间的比率。占空比的调整可以控制电机的速度或者LED的亮度。
```c
// 示例代码:调整PWM占空比
void Adjust_PWM_DutyCycle(TIM_HandleTypeDef *htim, uint32_t Channel, uint16_t new_duty_cycle)
{
if(new_duty_cycle > htim->Init.Period) new_duty_cycle = htim->Init.Period;
__HAL_TIM_SET_COMPARE(htim, Channel, new_duty_cycle);
}
int main(void)
{
HAL_Init();
MX_TIM3_Init();
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
Adjust_PWM_DutyCycle(&htim3, TIM_CHANNEL_1, 750); // 设置占空比为75%
while (1)
{
}
}
```
在上面的代码中,`Adjust_PWM_DutyCycle`函数用于调整指定通道的PWM占空比。调用`HAL_TIM_PWM_Start`函数启动PWM信号输出,并通过改变`Pulse`参数来调整占空比。
## 3.2 软件算法在PWM控制中的运用
硬件定时器虽然能够生成基础的PWM波形,但在复杂的应用场景中,软件算法的辅助至关重要,可以实现更精确的控制。
### 3.2.1 查表法实现PWM波形的精确控制
查表法是通过预先计算好一系列的占空比值,并将这些值存储在查找表中,根据需要快速调整占空比。
```c
// 查表法示例
uint16_t pwm_table[] = {0, 100, 200, 300, ..., 1000}; // 预设的PWM占空比查找表
#define PWM_TABLE_SIZE (sizeof(pwm_table) / sizeof(pwm_table[0]))
void Set_PWM_DutyCycle_Curve(TIM_HandleTypeDef *htim, uint32_t Channel)
{
uint16_t current_value = 0;
for(int i = 0; i < PWM_TABLE_SIZE; i++)
{
HAL_Delay(10); // 延时10ms
current_value = pwm_table[i];
Adjust_PWM_DutyCycle(htim, Channel, current_value);
}
}
int main(void)
{
HAL_Init();
MX_TIM3_Init();
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
Set_PWM_DutyCycle_Curve(&htim3, TIM_CHANNEL_1); // 设置PWM波形曲线
while (1)
{
}
}
```
在上述代码中,`Set_PWM_DutyCycle_Curve`函数通过遍历查找表来连续改变PWM的占空比,从而形成一个PWM波形曲线。这种方法在模拟渐变效果时非常有用。
### 3.2.2 实时调整PWM波形的策略
在很多应用场景下,需要根据实时数据来动态调整PWM波形。例如,在电机控制系统中,可能需要根据传感器反馈来调节电机的转速。
```c
// 实时调整PWM波形的策略示例
void RealTime_PWM_Control(TIM_HandleTypeDef *htim, uint32_t Channel)
{
uint16_t duty_cycle = 0;
while(1)
{
duty_cycle = Read_Sensor_Data(); // 假设这是一个读取传感器数据的函数
Adjust_PWM_DutyCycle(htim, Channel, duty_cycle);
HAL_Delay(10); // 根据实际需要调整延时时间
}
}
int main(void)
{
HAL_Init();
MX_TIM3_Init();
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
RealTime_PWM_Control(&htim3, TIM_CHANNEL_1); // 实时调整PWM波形
while (1)
{
}
}
```
这段代码模拟了实时PWM控制的场景,通过读取传感器数据来实时调整PWM波形。注意,实时控制可能需要使用中断或DMA来确保及时响应。
## 3.3 调试与优化PWM输出
调试是验证PWM波形是否符合预期的重要步骤。示波器是调试PWM波形最常用的工具。
### 3.3.1 使用示波器验证PWM波形
使用示波器验证PWM波形时,需要观察波形的频率、占空比、上升沿和下降沿等参数是否与预期一致。
(示波器图像)
上图显示了一个典型的PWM波形,其中黄色线标记的是周期,蓝色线标记的是占空比。
### 3.3.2 优化PWM性能的建议和技巧
- **提高分辨率**:增大定时器的自动重载寄存器值,可以获得更高的PWM分辨率。
- **调整占空比的精度**:通过软件算法如查表法或者实时计算,可以更精确地控制占空比。
- **降低干扰**:合理安排PWM信号与其他信号的时序,避免干扰。
- **使用DMA**:如果需要更快速地调整PWM值,可以使用DMA来减少CPU负载。
在优化过程中,可以考虑使用STM32CubeMX工具来辅助生成代码,并使用调试接口(如ST-Link)进行实时调试。
优化PWM性能不仅需要理论知识,还需要丰富的实践经验。通过反复的测试和调整,可以找到最适合特定应用场景的PWM解决方案。
# 4. ```
# 第四章:PWM控制的进阶应用
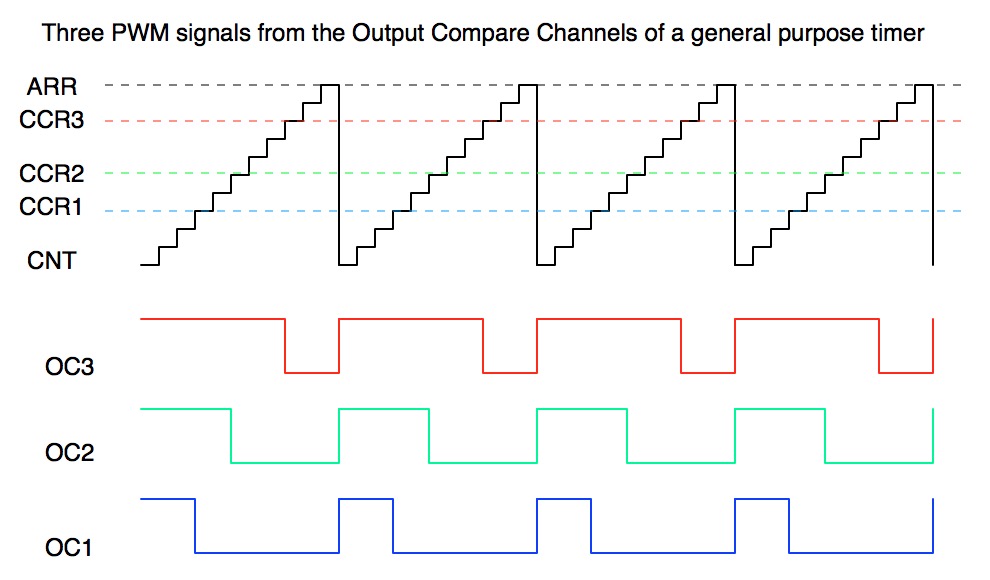
## 4.1 多通道PWM同步输出
### 4.1.1 同步机制的实现原理
多通道PWM同步输出指的是在STM32微控制器中,通过软件或硬件的方式,使得多个PWM通道的输出信号能够保持时间上的严格同步。这在电机控制等领域非常重要,因为电机的平稳运行依赖于精确且一致的控制信号。实现同步机制的原理通常涉及以下几个方面:
1. **时钟源的同步**:确保所有PWM通道使用同一个时钟源,这样各个通道的时钟频率和相位保持一致。
2. **定时器的级联**:在某些微控制器中,可以将一个定时器作为主定时器,其他定时器作为从属定时器,并通过硬件连接实现时序的同步。
3. **软件管理**:利用STM32的高级定时器功能,通过编程将多个通道设置为同步模式,并确保更新事件(例如溢出)同时触发所有通道的更新。
### 4.1.2 多通道PWM在电机控制中的应用
多通道PWM同步输出在电机控制中的应用是相当广泛的,尤其在步进电机和伺服电机的控制中。下面列举了一些关键的应用场景:
- **步进电机控制**:在步进电机的全步进或半步进模式下,需要精确控制每个相位的电流以实现步进动作。通过多通道PWM同步输出可以实现对步进电机各相绕组的精确驱动。
- **伺服电机控制**:在伺服电机控制中,通常需要同步控制转矩和速度。多通道PWM信号用于控制电机的功率放大器,实现转矩的精确控制。
- **多轴控制**:在多轴运动控制系统中,通过同步多个PWM信号可以实现复杂的运动控制,如机器人关节的协调动作。
### 4.1.3 多通道PWM同步输出代码示例
以下是一个简单的代码示例,展示了如何在STM32微控制器中配置三个通道的PWM输出,以实现同步控制。
```c
// 假设使用TIM3定时器,使用三个通道(CH1、CH2、CH3)
void TIM3_PWM_Synchronization_Config(void) {
// 定时器初始化结构体
TIM_HandleTypeDef htim3;
// 通道初始化结构体数组
TIM_OC_InitTypeDef sConfigOC = {0};
// 使能定时器时钟
__HAL_RCC_TIM3_CLK_ENABLE();
// 定时器基本配置
htim3.Instance = TIM3;
htim3.Init.Prescaler = 0;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim3);
// 配置PWM通道
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; // 初始占空比为50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2);
HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_3);
// 启动PWM
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3);
// 同步启动所有通道
__HAL_TIM_ENABLE_ALL_TIMERS(&htim3);
}
```
在此代码中,我们初始化了一个定时器TIM3并配置了三个PWM通道(CH1、CH2、CH3)。通过调用`HAL_TIM_PWM_ConfigChannel()`函数,我们设置了每个通道的PWM模式、占空比、极性和快速模式。最后,使用`HAL_TIM_PWM_Start()`函数启动所有通道的PWM输出,并通过`__HAL_TIM_ENABLE_ALL_TIMERS()`函数确保所有通道同步启动。
### 4.1.4 高级同步技术的应用
为了提高同步输出的准确性和灵活性,STM32提供了一些高级同步技术,比如触发器、更新事件和死区控制。高级同步技术通过复杂的硬件配置和软件编程实现高级控制逻辑,适用于复杂的应用场景,如复杂的电机驱动和功率电子控制。
## 4.2 高级PWM调制技术
### 4.2.1 相位和频率调制策略
相位和频率调制策略是PWM高级调制技术中的重要组成部分,主要用于通信系统和精确控制场合。通过改变PWM信号的相位和频率,可以调整输出功率和信号的动态响应特性。
#### 相位调制
相位调制指的是改变PWM信号中上升沿和下降沿的时间位置,以改变波形的相位。在STM32微控制器中,可以通过调整定时器的捕获比较寄存器(例如,TIMx_CCR1、TIMx_CCR2...等)来实现相位的调整。
```c
// 示例代码,调整相位
htim3.Instance->CCR1 = new_phase_value; // 对于CH1通道进行相位调整
htim3.Instance->CCR2 = new_phase_value; // 对于CH2通道进行相位调整
htim3.Instance->CCR3 = new_phase_value; // 对于CH3通道进行相位调整
```
#### 频率调制
频率调制是改变PWM波形的频率。在STM32中,改变频率是通过改变定时器的预分频器(Prescaler)或自动重载寄存器(Auto-reload register)的值来实现。
```c
// 示例代码,调整频率
htim3.Init.Prescaler += 1; // 增加预分频器值,降低PWM频率
htim3.Init.Period += 1; // 增加自动重载值,同时增加频率
HAL_TIM_PWM_Init(&htim3); // 重新初始化定时器以应用新的频率设置
```
### 4.2.2 调制技术在通信系统中的应用案例
在无线通信系统中,调制技术用于将信息调制到载波信号上,以便于信号的传输。PWM调制技术在通信中的应用,可以实现数据的编码和传输。
#### 数字调制
数字调制是通过改变载波信号的参数(如相位或频率)来表示数字信息。例如,在PWM调制中,可以将一个数字信号的“0”和“1”编码为不同的相位变化,从而实现数字通信。
```c
// 示例代码,数字调制
if (digital_data == '1') {
// 发送'1'时调整到一个特定的相位或频率
htim3.Instance->CCR1 = phase_value_one;
} else if (digital_data == '0') {
// 发送'0'时调整到另一个相位或频率
htim3.Instance->CCR1 = phase_value_zero;
}
```
#### 模拟调制
模拟调制则是通过改变PWM信号的占空比来模拟出模拟信号。这种调制方式适用于需要传递模拟信息的场合,比如音频信号。
```c
// 示例代码,模拟调制
htim3.Instance->CCR1 = analog_signal_level; // 设置占空比以模拟出对应的模拟信号水平
```
在应用这些调制技术时,开发者需要根据具体的应用需求选择合适的调制策略,并通过精确的时序控制,确保信号的稳定和准确传输。
## 4.3 PWM控制的故障诊断与处理
### 4.3.1 常见PWM故障的诊断方法
PWM控制系统的故障诊断是确保系统稳定运行的关键步骤。以下是一些常见的故障诊断方法:
1. **波形观察**:使用示波器等测试设备直接观察PWM信号的波形,检查占空比、频率、相位等参数是否正常。
2. **信号完整性测试**:检查PWM信号的传输路径是否存在干扰或信号衰减,确保信号完整性。
3. **软件监测**:在软件层面监测PWM信号生成的状态,如定时器溢出、中断触发情况等。
4. **参数对比**:将当前系统状态与已知的良好状态进行比较,查找差异。
### 4.3.2 PWM故障处理的实操案例
在实际的PWM控制系统中,故障处理需要根据故障的具体情况来进行。以下是一个处理PWM信号丢失故障的实操案例:
```c
void PWM_Signal_Lost_FaultHandling(void) {
// 假设已经通过某种方式检测到PWM信号丢失
if (Is_PWM_Signal_Lost()) {
// 检查硬件连接是否正常
Check_PWM_Hardware_Connection();
// 检查定时器配置是否正确
if (!Is_TIM_Config_Correct()) {
// 重新配置定时器参数
Correct_TIM_Configuration();
}
// 检查中断和DMA是否正常工作
if (!Is_Interrupt_DMAWorking()) {
// 重新配置中断和DMA
Reinitialize_Interrupt_DMA();
}
// 如果以上步骤都无法解决问题,则可能需要检查代码逻辑
if (!Is_PWM_Control_Correct()) {
// 调试PWM控制逻辑
Debug_PWM_Control();
}
}
}
```
在上述案例中,首先判断PWM信号是否丢失,然后按照不同的可能原因逐一排查。检查硬件连接、定时器配置、中断和DMA工作状态以及代码逻辑。通过逐步排除故障,最终定位问题并解决。
通过这些故障诊断与处理的步骤,可以有效地减少PWM控制系统的不稳定因素,提高系统的整体可靠性。
```
# 5. 集成开发环境下的PWM编程
## 5.1 STM32CubeMX工具的使用
### 5.1.1 工具界面介绍及项目配置
STM32CubeMX是ST公司为其STM32系列微控制器推出的图形化配置工具,它可以帮助开发者快速配置微控制器的各个参数,并自动生成初始化代码。这一工具极大地简化了开发过程,尤其是对于PWM功能的实现。
使用STM32CubeMX配置PWM涉及以下步骤:
1. **创建新项目**:打开STM32CubeMX,选择“New Project”然后从STM32芯片系列中选择对应的微控制器型号。也可以通过搜索框直接搜索型号。
2. **配置时钟树(Clock Tree)**:首先需要配置微控制器的时钟源,因为PWM的频率是基于微控制器的时钟频率生成的。STM32CubeMX能够帮助开发者设置合适的时钟配置,以保证PWM输出的准确性。
3. **配置定时器(Timers)**:在左侧的“Peripherals”列中选择“Timers”,然后在中间区域选择“TIMx”来打开定时器配置窗口。在此处可以配置PWM通道,并设置相应的参数,如占空比、计数模式等。
4. **配置PWM模式**:在定时器配置窗口中,选择输出比较模式为PWM,并根据需要配置输出极性。然后,可以选择PWM模式为“PWM Generation Channel 1”,“2”,“3”或“4”,根据通道数量而定。
5. **项目设置**:点击“Project”菜单,填写项目名称,选择项目路径,选择IDE(例如Keil MDK、IAR EWARM或SW4STM32),最后点击“Generate Code”生成代码。
### 5.1.2 自动代码生成与PWM参数调整
STM32CubeMX生成的代码是基于HAL库的,因此它非常适合初学者快速上手和进行PWM编程。生成的代码中包含了必要的初始化函数和HAL库函数,开发者只需专注于业务逻辑部分。
PWM参数的调整通常集中在`main.c`文件中的`MX_TIMx_Init`函数。通过修改这个函数中的参数,可以精细控制PWM的输出。例如,调整占空比和频率的代码片段可能如下所示:
```c
TIM_HandleTypeDef htimx;
void MX_TIMx_Init(void)
{
TIM_OC_InitTypeDef sConfigOC = {0};
htimx.Instance = TIMx;
htimx.Init.Prescaler = (uint32_t)(SystemCoreClock / 1000000) - 1; // 假设我们想要的时钟频率是1MHz
htimx.Init.CounterMode = TIM_COUNTERMODE_UP;
htimx.Init.Period = 999; // 1MHz时钟频率下,1000周期即1ms
htimx.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htimx.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_PWM_Init(&htimx);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; // 初始占空比为50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htimx, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htimx, TIM_CHANNEL_1); // 启动PWM
}
```
在实际应用中,可能还需要根据需要编写额外的函数来动态调整PWM参数,如动态改变占空比来控制电机速度。
## 5.2 HAL库在PWM编程中的应用
### 5.2.1 HAL库简介及其优势
HAL库,即硬件抽象层库,是ST官方提供的用于简化STM32系列微控制器编程的中间件。HAL库为开发者提供了一套丰富的API,使得开发者可以不必深入了解底层硬件细节,而能够通过简单的函数调用来操作硬件。
HAL库的主要优势包括:
- **硬件无关性**:HAL库抽象了硬件细节,使得代码具有更好的可移植性。
- **丰富的API**:HAL库提供了广泛的API,覆盖了大多数硬件操作,包括定时器、ADC、DAC、I2C、SPI、UART等。
- **事件驱动模型**:HAL库支持事件驱动模型,允许开发者为不同的硬件事件编写处理函数,如定时器中断、ADC转换完成等。
- **低延迟**:由于HAL库是直接与硬件寄存器交互的,因此它提供了较低的执行延迟。
### 5.2.2 编写PWM控制代码的最佳实践
当使用HAL库编写PWM控制代码时,有一些最佳实践值得遵循,以确保代码的可读性、可维护性和性能。
1. **初始化时设置参数**:在初始化PWM时,设置合适的预分频器和计数值,以达到期望的频率和分辨率。
2. **使用中断驱动**:若需频繁调整PWM参数,可以使用定时器中断来响应变化,并在中断服务程序中调整PWM波形。
3. **动态调整占空比**:在主循环或其他适当的位置动态调整占空比,以便实时控制外设,如LED亮度或电机速度。
下面是一个简单的示例,演示如何在HAL库中动态调整PWM占空比:
```c
void HAL_TIM_MspPostInit(TIM_HandleTypeDef *htim);
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(htim->Instance==TIMx)
{
//使能定时器x时钟和GPIO时钟
__HAL_RCC_TIMx_CLK_ENABLE();
__HAL_RCC_GPIOx_CLK_ENABLE();
//配置PWM引脚为复用推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_x;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AFx_TIMx;
HAL_GPIO_Init(GPIOx, &GPIO_InitStruct);
//其他定时器初始化...
}
}
void HAL_TIM_PWM_MspDeInit(TIM_HandleTypeDef *htim)
{
//关闭时钟和GPIO配置...
}
void HAL_TIM_PWM_Start_IT(TIM_HandleTypeDef *htim, uint32_t Channel)
{
//启动定时器x的PWM输出,并设置为中断模式
HAL_TIM_PWM_Start(htim, Channel);
HAL_TIM_Base_Start_IT(&htimx); //确保中断能够触发
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
//当定时器溢出中断发生时,调整占空比
if(htim->Instance == TIMx)
{
static uint32_t PWM_Duty_Cycle = 0;
PWM_Duty_Cycle += 50;
if(PWM_Duty_Cycle > htimx.Init.Period)
PWM_Duty_Cycle = 0;
__HAL_TIM_SET_COMPARE(htim, TIM_CHANNEL_1, PWM_Duty_Cycle);
}
}
```
在实际应用中,将需要根据具体场景调整这段代码,例如在中断服务例程中添加逻辑来处理其他业务需求,或者更改占空比调整的规则。
在HAL库中使用PWM,能够使得代码更加结构化,易于管理和维护,同时也能够利用库提供的大量优化,提高整体的运行效率。
# 6. 深入理解STM32的高级PWM功能
随着微控制器技术的不断进步,STM32系列微控制器在PWM控制方面已经远远超出了基本的PWM波形输出功能。本章将深入探讨STM32的高级PWM功能,包括死区时间的配置、ADC同步触发、以及高速PWM等特性,旨在帮助读者深入理解STM32的高级PWM功能,并在实际项目中应用这些功能来解决复杂的问题。
## 6.1 死区时间的配置与应用
在电机控制等应用中,由于电子开关的切换速度有限,为了避免逆变器中上下桥臂的MOSFET管同时导通导致短路,就需要在PWM信号上设置一个短暂的死区时间。STM32的定时器提供了灵活的死区时间配置选项,可以有效防止逆变器中的桥臂直通现象。
### 6.1.1 死区时间的配置原理
死区时间的配置通常是在互补PWM波形生成过程中实现的。STM32的定时器可以通过设置特定的寄存器来调整死区时间。死区时间的计算公式通常为:
\[ t_{dead} = (DTG + 1) \times T_{TIMxCLK} \div PSC \]
其中,DTG代表死区寄存器的值,T_{TIMxCLK}是定时器的时钟频率,PSC是预分频器的值。
### 6.1.2 实现步骤
配置死区时间的步骤如下:
1. 确定定时器时钟频率和预分频器的值。
2. 计算所需的死区时间,并选择合适的DTG值。
3. 在定时器的死区寄存器中设置DTG值。
4. 启用定时器的死区发生器功能。
代码示例:
```c
// 假定时器时钟为72MHz,预分频器为72-1
#define TIM_CLOCK 72000000
#define PRESCALER 72 - 1
// 设置死区时间大约为1微秒
uint32_t dtg_value = (1 * TIM_CLOCK / (PRESCALER + 1)) - 1;
// 配置定时器死区时间寄存器
TIMx->BDTR |= (dtg_value << TIM_BDTR_DTG_Pos);
TIMx->BDTR |= TIM_BDTR_DTEN; // 启用死区发生器
```
## 6.2 ADC同步触发
在一些需要同时采集模拟信号和PWM波形的应用中,ADC同步触发功能就显得尤为重要。STM32的高级定时器可以通过触发事件与ADC进行同步,确保采集的数据与PWM状态精确对齐。
### 6.2.1 同步触发的原理
STM32的定时器可以配置为在PWM更新事件、比较匹配事件等时刻产生触发信号。这个触发信号可以用来启动ADC的转换过程,从而实现数据采集的同步。
### 6.2.2 实现步骤
配置ADC同步触发的步骤如下:
1. 配置ADC转换序列和触发源。
2. 配置定时器产生触发事件。
3. 将定时器的触发输出连接到ADC的外部触发输入。
4. 启动定时器和ADC。
代码示例:
```c
// 配置ADC1序列,假设使用通道1
ADC1->SQR3 |= ADC_SQR3_SQ1_0; // 序列1通道1
// 配置定时器触发ADC
TIMx->CR2 |= TIM_CR2_MMS_1; // 设置触发输出为更新事件
ADC1->CR2 |= ADC_CR2_EXTEN_1 | ADC_CR2_EXTEN_0; // 使能外部触发,并设置为上升沿触发
ADC1->CR2 |= ADC_CR2_EXTSEL_0 | ADC_CR2_EXTSEL_1 | ADC_CR2_EXTSEL_2; // 选择定时器x的更新事件作为触发源
// 启动定时器
TIMx->CR1 |= TIM_CR1_CEN;
// 启动ADC
ADC1->CR2 |= ADC_CR2_ADON;
```
## 6.3 高速PWM模式
为了适应高速开关频率的需求,STM32提供了高速PWM模式。在这种模式下,定时器的计数器频率可以达到微控制器时钟频率的一半,这对于需要高频PWM波形的应用至关重要。
### 6.3.1 高速PWM模式的特点
高速PWM模式允许定时器以接近MCU核心时钟的一半频率进行计数,从而可以生成更高频率的PWM波形。
### 6.3.2 实现步骤
配置高速PWM模式的步骤如下:
1. 选择定时器的高速时钟源。
2. 配置定时器的预分频器。
3. 启用高速计数器模式。
4. 配置PWM波形参数,如周期和占空比。
代码示例:
```c
// 假设使用TIM1定时器
// 设置高速时钟源为内部时钟的2倍
RCC->APB2ENR |= RCC_APB2ENR_TIM1EN;
TIM1->CR1 |= TIM_CR1_CEN | TIM_CR1_ARPE; // 启用计时器并启用自动重载预装载
TIM1->ARR = 0xFFFF; // 设置自动重载寄存器为最大值
// 启用高速计数器模式
TIM1->CR1 |= TIM_CR1_CEN | TIM_CR1_ARPE | TIM_CR1_CMS_1;
// 配置PWM模式等
```
通过以上内容的学习,我们可以了解到STM32在PWM控制方面提供的高级功能,以及如何在实际应用中配置和使用这些功能。对于从事工业控制、电机驱动等领域的开发者来说,这些高级PWM功能无疑能提供更高的性能和灵活性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
台达触摸屏宏编程:入门到精通的21天速成指南

# 摘要
本文系统地介绍了台达触摸屏宏编程的全面知识体系,从基础环境设置到高级应用实践,为触摸屏编程提供了详尽的指导。首先概述了宏编程的概念和触摸屏环境的搭建,然后深入探讨了宏编程语言的基础知识、宏指令和控制逻辑的实现。接下来,文章介绍了宏编程实践中的输入输出操作、数据处理以及与外部设备的交互技巧。进阶应用部分覆盖了高级功能开发、与PLC的通信以及故障诊断与调试。最后,通过项目案例实战,展现了如何将理论知识应用
信号完整性不再难:FET1.1设计实践揭秘如何在QFP48 MTT中实现

# 摘要
本文综合探讨了信号完整性在高速电路设计中的基础理论及应用。首先介绍信号完整性核心概念和关键影响因素,然后着重分析QFP48封装对信号完整性的作用及其在MTT技术中的应用。文中进一步探讨了FET1.1设计方法论及其在QFP48封装设计中的实践和优化策略。通过案例研究,本文展示了FET1.1在实际工程应用中的效果,并总结了相关设计经验。最后,文章展望了FET
【MATLAB M_map地图投影选择】:理论与实践的完美结合
:no_upscale()/cdn.vox-cdn.com/uploads/chorus_asset/file/3470884/1024px-Robinson_projection_SW.0.jpg)
# 摘要
M_map工具包是一种在MATLAB环境下使用的地图投影软件,提供了丰富的地图投影方法与定制选项,用
打造数据驱动决策:Proton-WMS报表自定义与分析教程
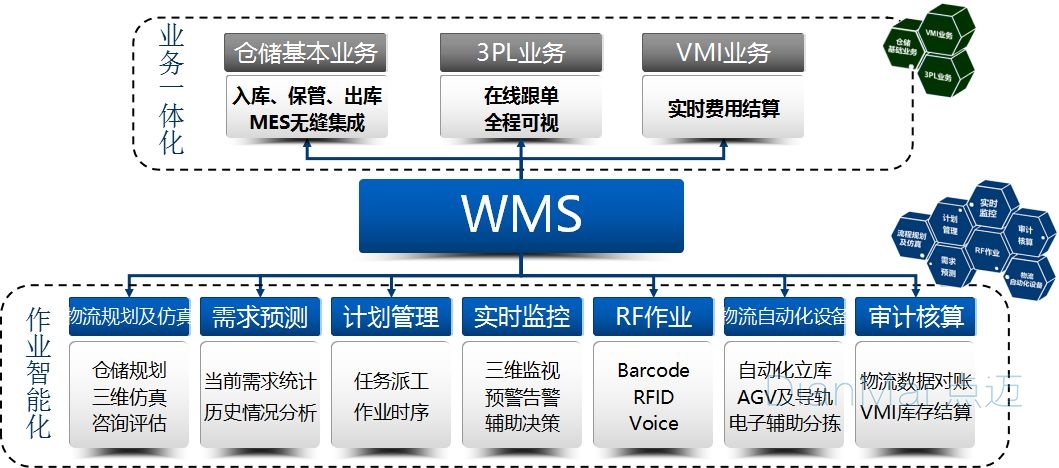
# 摘要
本文旨在全面介绍Proton-WMS报表系统的设计、自定义、实践操作、深入应用以及优化与系统集成。首先概述了报表系统的基本概念和架构,随后详细探讨了报表自定义的理论基础与实际操作,包括报表的设计理论、结构解析、参数与过滤器的配置。第三章深入到报表的实践操作,包括创建过程中的模板选择、字段格式设置、样式与交互设计,以及数据钻取与切片分析的技术。第四章讨论了报表分析的高级方法,如何进行大数据分析,以及报表的自动化
【DELPHI图像旋转技术深度解析】:从理论到实践的12个关键点

# 摘要
图像旋转是数字图像处理领域的一项关键技术,它在图像分析和编辑中扮演着重要角色。本文详细介绍了图像旋转技术的基本概念、数学原理、算法实现,以及在特定软件环境(如DELPHI)中的应用。通过对二维图像变换、旋转角度和中心以及插值方法的分析
RM69330 vs 竞争对手:深度对比分析与最佳应用场景揭秘

# 摘要
本文全面比较了RM69330与市场上其它竞争产品,深入分析了RM69330的技术规格和功能特性。通过核心性能参数对比、功能特性分析以及兼容性和生态系统支持的探讨,本文揭示了RM69330在多个行业中的应用潜力,包括消费电子、工业自动化和医疗健康设备。行业案例与应用场景分析部分着重探讨了RM69330在实际使用中的表现和效益。文章还对RM69330的市场表现进行了评估,并提供了应
无线信号信噪比(SNR)测试:揭示信号质量的秘密武器!
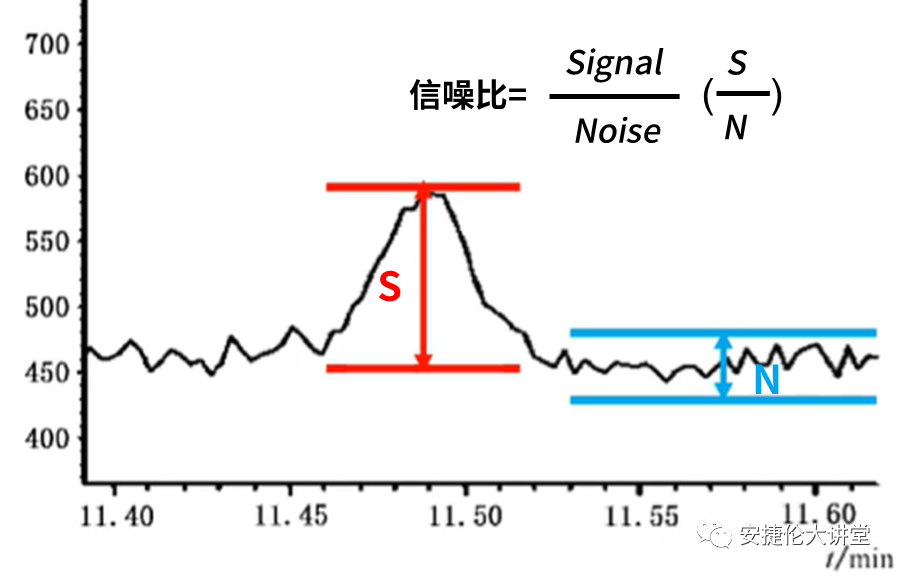
# 摘要
无线信号信噪比(SNR)是衡量无线通信系统性能的关键参数,直接影响信号质量和系统容量。本文系统地介绍了SNR的基础理论、测量技术和测试实践,探讨了SNR与无线通信系统性能的关联,特别是在天线设计和5G技术中的应用。通过分析实际测试案例,本文阐述了信噪比测试在无线网络优化中的重要作用,并对信噪比测试未来的技术发展趋势和挑战进行
【UML图表深度应用】:Rose工具拓展与现代UML工具的兼容性探索
# 摘要
本文系统地介绍了统一建模语言(UML)图表的理论基础及其在软件工程中的重要性,并对经典的Rose工具与现代UML工具进行了深入探讨和比较。文章首先回顾了UML图表的理论基础,强调了其在软件设计中的核心作用。接着,重点分析了Rose工具的安装、配置、操作以及在UML图表设计中的应用。随后,本文转向现代UML工具,阐释其在设计和配置方面的
台达PLC与HMI整合之道:WPLSoft界面设计与数据交互秘笈
# 摘要
本文旨在提供台达PLC与HMI交互的深入指南,涵盖了从基础界面设计到高级功能实现的全面内容。首先介绍了WPLSoft界面设计的基础知识,包括界面元素的创建与布局以及动态数据的绑定和显示。随后深入探讨了WPLSoft的高级界面功能,如人机交互元素的应用、数据库与HMI的数据交互以及脚本与事件驱动编程。第四章重点介绍了PLC与HMI之间的数据交互进阶知识,包括PLC程序设计基础、
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )