S7-1200_1500 PLC与S200伺服:掌握这7个关键点,优化你的EPOS控制
发布时间: 2024-12-17 10:49:42 阅读量: 4 订阅数: 2 

S7-1200或1500连接S200伺服实现EPOS基本定位控制(使用FB38051).pdf

参考资源链接:[S7-1200/1500与S200伺服EPOS控制:FB38051实现基本定位教程](https://wenku.csdn.net/doc/40ii1igzqq?spm=1055.2635.3001.10343)
# 1. S7-1200/1500 PLC与S200伺服概述
在自动化控制系统领域,西门子S7-1200和S7-1500 PLC与S200伺服驱动器的组合已经成为诸多应用中的标准配置。本章节将简要介绍这两种设备的基础概念,并概述它们如何在工业自动化环境中协同工作。
## 1.1 PLC与伺服驱动器的角色和功能
可编程逻辑控制器(PLC)是工业自动化的核心,负责根据预设程序来控制机械和工艺流程。S7-1200和S7-1500是西门子面向中小型项目的PLC产品,它们提供了高度的灵活性和扩展性,支持各种通信和I/O模块。
与此同时,伺服驱动器则负责精确控制电机运动。S200伺服驱动器系列与西门子的S120系列相比,尽管规模较小,但仍提供高性能和高精度的运动控制解决方案,特别适用于小型和中等复杂度的应用。
## 1.2 PLC与伺服驱动器的交互
在实际应用中,PLC与伺服驱动器通过通讯网络(如PROFIBUS或Profinet)实现数据交换。PLC发出控制指令给伺服驱动器,以控制电机的启动、停止、速度和位置等参数。而伺服驱动器则实时反馈电机的状态信息给PLC,以便进行必要的调整。
掌握这两种设备的基本功能和它们之间的交互,是了解其后续深入控制和优化的前提。在接下来的章节中,我们将详细探讨EPOS控制基础理论、具体的控制实践,以及如何将这些知识应用于实际的工业项目中。
# 2. EPOS控制基础与理论
## 2.1 EPOS控制系统概念
### 2.1.1 EPOS系统的工作原理
EPOS系统(Electronic Positioning System)是一种以电子方式实现精确位置控制的系统,广泛应用于自动化设备中。EPOS系统整合了运动控制器、伺服驱动器和执行机构(如伺服电机)的精确控制。
EPOS系统的工作原理基于数字信号处理和反馈控制机制。系统接收用户输入的目标位置或速度指令,通过内部的控制算法(如PID控制)计算出误差值,然后输出控制信号以驱动伺服电机达到期望的状态。该过程中,伺服电机内置的编码器提供反馈信息,使系统能够通过闭环控制,保持电机的精确位置或速度。
EPOS系统的核心在于其精确的控制算法和灵活的配置选项,这使得它在各种速度和位置控制应用中都能提供优越的性能。系统通过内部的高性能处理器和丰富的输入输出接口,可以轻松集成到复杂的自动化生产线中,并与PLC系统协同工作。
### 2.1.2 EPOS与PLC的交互方式
在自动化控制系统中,EPOS系统与PLC(可编程逻辑控制器)的交互是实现复杂控制逻辑的关键。EPOS与PLC的交互通过通信接口来实现,如工业以太网、PROFIBUS、Profinet等。
在通信建立之后,PLC负责发送控制命令和数据给EPOS系统,而EPOS系统则负责执行这些命令,并将状态信息反馈给PLC。这种交互可以是周期性的,也可以是基于事件的。例如,在一个自动化装配线中,PLC可能会周期性地发送位置更新给EPOS系统,而EPOS系统会在达到预设位置后,反馈一个确认信号给PLC。
EPOS系统与PLC之间的接口通常包括输入输出(I/O)信号、模拟信号和通信总线接口。一些EPOS系统还支持直接在PLC程序中嵌入控制代码,实现更深层次的集成。
在使用EPOS系统与PLC进行交互时,确保通信协议的一致性和数据同步是非常关键的。这通常涉及到对通信参数的配置,如波特率、数据位、停止位和奇偶校验等。另外,数据的格式和转换也必须符合双方的处理能力,以保证信息能正确无误地交换。
## 2.2 关键硬件组件解析
### 2.2.1 PLC的选型与配置
选择合适的PLC是构建有效EPOS系统的基础。在选型时,需要考虑应用场合、控制逻辑的复杂性、所需的输入输出点数、处理速度、网络兼容性和未来扩展的可能性等因素。
PLC配置过程中,首先需要根据应用场景确定CPU的类型和规格,例如,对于要求高速处理的应用,应选择具有快速指令周期和高级数学处理能力的CPU。其次,要配置I/O模块,以满足系统对数字量输入/输出、模拟量输入/输出、特殊功能模块等的需求。此外,还需要根据需要配置相应的通信模块,以实现与EPOS系统的通信和与其他系统组件的集成。
在配置过程中,还需要考虑软件支持的问题。选择一个拥有良好用户支持和丰富文档资料的PLC平台可以简化开发和调试的过程。最后,随着系统的扩展,还应考虑如何在不中断现有运行的情况下增加更多的模块或功能。
### 2.2.2 伺服驱动器和电机的选择
在EPOS系统中,伺服驱动器和电机的选择是确保系统性能的关键。伺服驱动器是实现精确控制的枢纽,它接收来自EPOS控制系统的指令,并将这些指令转换为电机运动的实际控制信号。
选择伺服驱动器时,主要考虑的因素包括电机的额定功率、额定转速、控制精度、过载能力等。同时,还必须考虑驱动器与电机之间的兼容性,以及驱动器支持的通信协议和网络接口是否符合整体系统设计的需求。
电机的选择同样重要。伺服电机能够提供高精度的位置、速度和扭矩控制,适用于需要快速响应和高动态性能的应用场合。在选择电机时,需要评估其扭矩-速度曲线是否满足应用要求,以及电机的物理尺寸是否适合安装空间。
对于某些特定应用,还需要考虑电机的防护等级、冷却方式、编码器类型等因素。在一些恶劣环境中,例如高污染或高湿度环境,就需要选择具有相应防护等级的电机,以确保系统的可靠性。
### 2.2.3 传感器与反馈系统
传感器和反馈系统在EPOS系统中扮演着至关重要的角色。它们提供了实际操作数据的反馈,使系统能够进行闭环控制,并确保精确度和可靠性。
常见的传感器类型包括位置传感器(如编码器)、速度传感器和扭矩传感器。其中,编码器是最常见的位置传感器,用于提供电机转角或转速的精确反馈。对于速度和扭矩的反馈,通常使用特定的传感器或者通过电机内置的测量系统来实现。
在配置反馈系统时,需要根据应用需求选择合适的传感器类型,并确定传感器的安装位置和方式,以确保反馈信号的准确性和可靠性。例如,为了精确控制一个机械臂的位置,需要将高精度的绝对编码器安装在每个关节的电机上。
此外,对于复杂的多轴运动控制系统,需要通过同步和校准技术确保所有传感器的反馈数据同步,以便EPOS系统能够准确地协调多个运动轴。
## 2.3 关键软件概念
### 2.3.1 编程环境与工具链
EPOS系统的编程环境是实现精确控制的基础。一个有效的编程环境应提供直观的用户界面、丰富的编程工具和良好的支持文档。
EPOS系统通常会使用专用的开发工具或集成开发环境(IDE),这些工具提供了项目管理、程序编辑、编译和调试的功能。用户可以通过这些工具创建和修改控制程序,然后上传到EPOS控制器中。
对于复杂的自动化系统,可能需要使用多个软件工具。例如,使用PLC编程软件进行系统的主逻辑编程,使用EPOS专用软件进行运动控制逻辑的开发和调试,同时还需要使用高级的仿真软件进行系统的预测试。
在工具链中,代码管理工具也非常重要,它帮助工程师维护版本控制,跟踪不同版本的变更和错误修复。此外,代码优化工具和分析工具可以协助工程师找到性能瓶颈,优化控制程序。
### 2.3.2 程序结构与编程标准
在EPOS系统中,编写可维护、高效率的控制程序需要遵循一定的程序结构和编程标准。良好的程序结构有助于提高代码的可读性、可维护性和可扩展性。
一般来说,EPOS控制程序可以分为几个层次,包括初始化代码、主控制循环、子程序或功能块以及中断服务程序等。初始化代码负责在启动时进行硬件配置和系统变量的初始化。主控制循环则包含了控制逻辑的核心部分,它根据输入信号和预定的逻辑来调整输出。子程序或功能块可以处理特定的任务,如电机运动控制、数据记录等。中断服务程序用于处理突发事件,如传感器触发或通信故障等。
在编程时,工程师还需要遵循特定的编程标准,比如模块化编程、变量命名规则和注释习惯等。这些标准能够帮助不同的开发人员理解和协作开发,提高程序的一致性。编程标准还可以包括错误处理机制、数据保护和恢复策略等,以确保系统的鲁棒性。
为了更好地实现程序结构和编程标准,EPOS系统还提供了丰富的编程接口(API)和函数库。这些资源可以简化复杂的控制任务,提高开发效率,并减少错误的发生。在实际应用中,工程师可以根据具体的控制需求,选择合适的编程模式和API进行开发。
[本章节内容完结]
# 3. 掌握EPOS控制的七个关键点
## 3.1 通信协议和网络设置
### 3.1.1 PROFIBUS与Profinet的配置
在EPOS控制环境中,通信协议的选择对系统的稳定性和响应速度至关重要。PROFIBUS和Profinet是两种广泛应用于工业控制的网络协议。PROFIBUS是基于RS485串行通信协议的一种总线技术,而Profinet则是一种基于以太网的工业通信协议。
配置PROFIBUS通常涉及以下步骤:
1. **硬件连接**:将PLC和伺服驱动器通过PROFIBUS接口连接。确保硬件之间的物理连接正确无误。
2. **网络配置**:在PLC的配置软件中设置PROFIBUS网络参数,包括地址分配和波特率。
3. **从站设备设置**:伺服驱动器作为PROFIBUS网络中的从站,也需要设置相应的通信参数以匹配PLC的配置。
4. **测试通信**:利用配置工具或PLC的诊断功能验证PROFIBUS网络的通信质量。
Profinet配置相对更为复杂,因为它支持更为丰富的通信模型:
1. **确定通信类型**:选择适合应用需求的Profinet通信类型(如IO控制、实时通信等)。
2. **设备配置**:为PLC和伺服驱动器分配IP地址,并设置设备名称。
3. **数据交换设置**:定义数据交换的结构,如数据块和参数块。
4. **启动网络诊断**:通过Profinet网络诊断工具检测和解决可能出现的网络问题。
### 3.1.2 实现PLC与伺服之间的同步
同步是EPOS控制系统中至关重要的一个环节,特别是在需要精密定位和高速协调动作的应用场景中。为了实现PLC与伺服之间的同步,需要关注以下几个方面:
1. **时钟同步**:确保PLC和伺服驱动器有相同的时钟基准,可以使用网络同步协议如PTP(Precision Time Protocol)。
2. **数据交换**:在同步操作中,确保数据交换的及时性和准确性,避免数据丢失或延迟。
3. **事件触发**:可以使用事件触发机制,当PLC接收到特定的输入信号时,发送同步指令给伺服驱动器。
4. **监控机制**:设置监控和反馈机制,实时监控同步状态,一旦出现问题立即采取措施。
同步通常需要编写特定的程序逻辑来实现,下面是一个简单的示例代码块,展示如何在PLC中实现与伺服的同步操作:
```plaintext
// 伪代码示例
IF Start_Synchronization AND !Synchronization_In_Progress THEN
Initialize_Synchronization();
Enable_Servo_Drive();
Wait_Until_Servo_Ready();
// 发送同步命令给伺服驱动器
Send_Synchronization_Command();
Synchronization_In_Progress := TRUE;
ENDIF;
```
上述代码中的`Initialize_Synchronization`, `Enable_Servo_Drive`, `Wait_Until_Servo_Ready`, 和 `Send_Synchronization_Command` 分别表示初始化同步、启用伺服驱动器、等待伺服驱动器就绪和发送同步命令的程序逻辑。每个函数后面应该有对应的程序实现,确保每一步操作能够被正确执行。
## 3.2 伺服参数的优化
### 3.2.1 参数配置与微调
伺服驱动器的参数配置是保证其性能发挥到最佳的关键步骤。参数配置包括基本参数设定以及根据实际应用的微调。
基本参数设定主要包含:
- **电机参数**:定义电机的额定电压、电流、转速和转矩等。
- **编码器参数**:包括编码器的类型和每转脉冲数等。
- **控制模式**:根据控制需求选择速度控制、位置控制或者扭矩控制模式。
微调则是为了优化控制性能,涉及到:
- **增益调整**:通过调整比例、积分和微分(PID)参数来获得更平滑和准确的控制。
- **滤波器参数**:针对不同应用调整速度和加速度的滤波器,以减少机械共振和超调。
- **电子齿轮比**:设定主轴和伺服电机的速比关系,以实现精确的同步动作。
参数的微调可以通过试验和错误的方式进行,也可以利用伺服驱动器提供的自动调整功能。下面是自动调整参数的代码示例:
```c
// 假设使用C语言风格的伪代码进行参数调整
void Auto_Tune_Servo(Drive_t *servo)
{
int status;
status = Start_Auto_Tuning(servo);
while(status == TUNING_IN_PROGRESS)
{
// 实时监测调整状态
status = Get_Tuning_Status(servo);
}
if(status == TUNING_SUCCESSFUL)
{
// 调整成功,保存参数
Save_Tuned_Parameters(servo);
}
else if(status == TUNING_FAILED)
{
// 调整失败,根据错误代码进行处理
Handle_Tuning_Failure(servo);
}
}
```
该代码展示了一个自动调整伺服参数的过程,需要实现几个关键函数:`Start_Auto_Tuning` 开始自动调整,`Get_Tuning_Status` 获取调整状态,`Save_Tuned_Parameters` 保存调整好的参数,以及`Handle_Tuning_Failure`处理调整失败情况。
### 3.2.2 控制模式的选择与应用
根据不同的应用需求,选择合适的控制模式可以极大地提高系统的性能和效率。以下是一些常用的控制模式及其应用场景:
- **速度控制模式**:适用于需要精确控制电机转速的应用,如传送带速度调节。
- **位置控制模式**:适用于定位精度要求很高的场合,比如机械臂的关节定位。
- **扭矩控制模式**:适用于需要精确控制电机输出扭矩的应用,如恒扭矩加载系统。
选择控制模式时,要考虑系统的动态响应和稳定性。下面是一个关于如何选择控制模式的表格,展示了不同的控制模式适用场景及它们的特点。
| 控制模式 | 适用场景 | 优点 | 缺点 |
|----------|-----------|------|------|
| 速度控制 | 传送带,风机 | 调速简单,响应速度快 | 对机械结构的磨损较大 |
| 位置控制 | 机器人,机床 | 定位精度高,适合复杂运动 | 对负载变化敏感 |
| 扭矩控制 | 恒扭矩应用 | 可以实现精确的力控制 | 实现复杂度高,需要高精度扭矩传感器 |
## 3.3 定位与运动控制
### 3.3.1 点对点定位控制
点对点定位控制是实现精确位置控制的基础,通常用于将伺服驱动器控制的机械部件从一个位置准确移动到另一个位置。在EPOS控制系统中,点对点定位可以采用多种控制方式:
1. **绝对定位**:基于参考点,通过指定目标位置的绝对坐标来实现定位。
2. **相对定位**:基于当前位置,通过指定目标位置的相对坐标移动距离来实现定位。
实现点对点定位时,需要根据具体的应用需求设置适当的加速度和减速度,以保证定位过程的平滑性和准确性。例如,使用PLC实现点对点定位的逻辑可能如下:
```c
// 伪代码示例
void Move_To_Target(Point target)
{
// 计算目标位置和当前位置之间的距离
int distance = Calculate_Distance(Current_Point, target);
// 加速到设定的最大速度
Accelerate_To_Max_Speed();
// 等待移动到目标位置
Wait_Until_Arrival(target, distance);
// 减速到停止
Decelerate_To_Stop();
}
```
### 3.3.2 轨迹规划与多轴协调
在复杂的运动控制应用中,如机器人路径规划或复杂曲面加工,轨迹规划与多轴协调是至关重要的。这涉及到在多轴系统中,如何使各个轴按照预定的路径和时间表协同工作。
1. **轨迹规划**:通常包括直线插补、圆弧插补等方法,需要使用专门的算法来规划出平滑且可实现的运动轨迹。
2. **多轴协调**:需要同步各个轴的运动速度和位置,使得在运动过程中各轴保持正确的相对位置和速度,这常常需要先进的控制算法来实现。
以下是一个简单的例子,展示如何在PLC程序中实现直线运动轨迹规划:
```c
// 伪代码示例
void Linear_Motion_Planning(Axis_t *axis1, Axis_t *axis2, Point start, Point end)
{
float x_speed = (end.x - start.x) / travel_time;
float y_speed = (end.y - start.y) / travel_time;
for(float t = 0; t < travel_time; t += time_step)
{
axis1->position = start.x + x_speed * t;
axis2->position = start.y + y_speed * t;
Update_Axis_Control(axis1, axis2);
Wait(time_step);
}
}
```
该示例代码中`Update_Axis_Control`函数负责更新轴的位置信息并控制轴的移动,`travel_time` 表示运动总时间,`time_step` 是单次更新的时间间隔。
通过轨迹规划与多轴协调,可以实现更加精确和复杂的运动控制,满足高级应用的需求。
# 4. 实际应用案例分析
工业自动化的核心在于将复杂的控制理论和机械设计转化为真实世界的解决方案。本章节深入探索EPOS控制系统在工业自动化中的具体应用实例,并剖析如何通过优化策略和故障排除来提升系统性能。
## 4.1 工业自动化中的应用实例
EPOS控制系统在工业自动化领域的应用极为广泛,涵盖了从简单的传送带系统到复杂的机器人单元协调控制。本小节深入讨论两种具体的应用实例,以揭示EPOS如何提升自动化流程的效率与精准性。
### 4.1.1 传送带系统控制
传送带系统是工业自动化中的基础环节。通过EPOS控制系统,可以实现传送带速度的精准控制,以及物料的有序分选、定位和传送。以下是传送带系统控制的实现步骤:
#### 配置步骤
1. **硬件组装**:安装传送带驱动电机,并将伺服驱动器连接到EPOS控制器上。确保传感器(如光电传感器)正确安装,并将反馈信号引入控制回路。
2. **软件设置**:在EPOS Studio中对伺服电机进行参数配置,设置传送带电机的速度和加速度参数。
3. **编程**:编写控制逻辑,包括启动、停止、正转、反转等基本控制命令,以及基于传感器输入的条件控制逻辑。
#### 关键代码示例
```pascal
// 启动传送带
EPOS_SetSpeed(MOTOR_ID, SPEED);
// 停止传送带
EPOS_SetSpeed(MOTOR_ID, 0);
// 基于传感器反馈的条件控制逻辑
IF SensorFeedback THEN
EPOS_SetSpeed(MOTOR_ID, REVERSE_SPEED);
ELSE
EPOS_SetSpeed(MOTOR_ID, FORWARD_SPEED);
END_IF;
```
#### 参数配置说明
- **MOTOR_ID**:代表连接到控制器的电机编号。
- **SPEED**:设置传送带的运行速度。
- **REVERSE_SPEED** 和 **FORWARD_SPEED**:设置传送带正转和反转的速度。
#### 性能优化与维护
- 定期检查传感器的响应时间和准确性,确保系统的可靠性和精准性。
- 通过调整PID参数,优化速度和位置控制的响应时间及稳定性。
- 对关键部件如电机和传动机构进行周期性的润滑和维护。
### 4.1.2 机器人单元的协调控制
工业机器人单元的协调控制是自动化技术中的高级应用。EPOS控制系统能够实现多轴的精准同步,使机器人执行复杂的动作和任务。以下是协调控制实现的关键要素:
#### 系统设计
1. **机械设计**:根据需要完成的任务设计机器人结构,并选择合适的伺服电机和驱动器。
2. **控制系统设计**:确保所有机器人单元的控制器能够实时通信,并共享控制指令和反馈数据。
3. **运动规划**:通过高级编程实现复杂运动路径的规划和执行。
#### 关键代码示例
```c
// 协调控制多轴运动
void CoordinatedMove(int axis1_pos, int axis2_pos, int axis3_pos) {
MoveAxis(axis1, axis1_pos);
MoveAxis(axis2, axis2_pos);
MoveAxis(axis3, axis3_pos);
}
```
#### 控制策略
- **运动规划**:采用插补算法对路径进行优化,实现平滑且高效的运动。
- **同步控制**:利用EPOS控制系统中的同步机制,确保各轴运动的协调一致性。
- **自适应控制**:通过传感器反馈调整动作参数,适应不同的工件和环境变化。
#### 性能优化与维护
- 针对特定任务优化运动算法,减少运动时间和能耗。
- 定期检查机器人关节的磨损和损坏,维护伺服驱动器和电机。
- 使用数据采集工具分析运动过程中的异常情况,进行故障排除。
## 4.2 优化策略与故障排除
在实现复杂自动化应用的同时,优化系统性能和排除故障是提升整体效率的关键。本小节提供了一系列优化策略和故障排除的建议。
### 4.2.1 常见问题诊断
故障排除的第一步是能够准确诊断出问题所在。常见问题包括但不限于以下几种:
#### 通信故障
- **问题描述**:控制器无法与伺服驱动器正常通信。
- **诊断方法**:检查通信线缆连接,验证通信参数设置是否匹配,使用通信诊断工具检测信号质量。
#### 性能下降
- **问题描述**:伺服系统响应速度变慢或停止响应。
- **诊断方法**:检查伺服参数配置,运行状态监控,分析是否存在过载或过热现象。
#### 同步失准
- **问题描述**:多轴同步运动时出现位置偏差。
- **诊断方法**:分析同步控制算法,检查编码器的精确度和同步信号的时序。
### 4.2.2 性能优化与维护建议
为保持EPOS控制系统的最佳运行状态,应定期进行性能优化和系统维护。
#### 性能优化
- **参数微调**:使用优化工具,如EPOS Studio中的自动调整功能,进行参数微调。
- **程序优化**:重新审视控制程序,通过模块化和结构化改进,优化程序的执行效率。
#### 系统维护
- **定期检查**:制定周期性的维护计划,检查所有硬件组件,包括电机、驱动器、传感器等。
- **系统升级**:定期更新EPOS控制软件,获取最新的功能改进和安全修复。
- **备份与恢复**:定期备份控制程序和参数设置,以防万一进行快速的系统恢复。
通过上述案例分析和优化策略的应用,可以显著提高EPOS控制系统的可靠性和效率,确保工业自动化的顺畅运行。
# 5. 未来趋势与技术发展
## 5.1 EPOS控制技术的未来方向
随着工业自动化和智能制造的不断发展,EPOS控制技术也在持续进化。未来的EPOS控制技术将朝着智能化、自适应控制、集成化和模块化方向发展,以应对更加复杂多变的应用场景。
### 5.1.1 智能化与自适应控制
在未来的工业生产中,EPOS控制系统不仅仅会执行简单的指令,还将集成更多的智能算法,进行复杂的决策支持。智能化的EPOS控制系统能够根据实时的工作数据和历史信息,自动优化控制参数,实现自适应控制。
**例如**,机器人单元在执行任务时,通过视觉系统识别物料的不同形状和重量,自适应调整抓取力度和移动路径。实现这一目标,EPOS系统需要集成机器视觉、深度学习算法以及高级运动规划技术。
### 5.1.2 集成化与模块化趋势
集成化和模块化是EPOS技术的另一个发展趋势。通过将多个控制模块集成到一个紧凑的设备中,可以降低系统的复杂度,简化安装调试流程,从而提高系统的整体可靠性。
**例如**,集成化的EPOS解决方案可以将电机驱动、位置控制、通信接口、以及电源管理等不同功能集成在单一的硬件设备中。用户只需要通过简单的配置即可实现复杂的控制任务。
## 5.2 持续学习与资源获取
为了跟上EPOS控制技术的发展步伐,持续学习是不可或缺的一环。以下是一些推荐的学习资料和行业内的交流平台,帮助IT和自动化专业人士深化对EPOS控制技术的理解。
### 5.2.1 推荐的学习资料和课程
- **在线课程**: 许多在线教育平台提供自动化和PLC控制相关的课程,例如Coursera、edX以及Udemy等。这些课程往往涵盖基础理论到高级应用的全面内容。
- **书籍**: 阅读由行业专家编写的书籍可以加深理解。推荐书目包括《工业自动化与控制系统》、《运动控制基础》等。
### 5.2.2 行业内的交流平台与社区
- **论坛和社区**: 一些专业的自动化论坛和社区,例如Control.com、Plcdev.com等,提供了一个分享经验和技术讨论的平台。
- **行业展会和研讨会**: 参加行业展会和研讨会能让你直接接触最新的产品和技术,也是建立行业联系的良机。例如,SPS/IPC/Drives和Automate展就是工业自动化领域的重要活动。
通过不断学习和积极参与社区活动,可以保持对EPOS控制技术的前沿了解,同时为自身职业发展提供更广阔的空间。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了使用 S7-1200 或 S7-1500 PLC 连接 S200 伺服来实现 EPOS 基本定位控制的秘诀。通过一系列标题,专栏揭示了优化 EPOS 控制的五大突破性技术,并提供了七个关键点,以帮助读者掌握 EPOS 控制。专栏还展示了 EPOS 定位控制在自动化中的实际应用案例,并提供了快速解决伺服通信难题的一招定乾坤法。此外,专栏还探讨了同步操作以实现极致精准定位控制的方法,以及如何在一天内精通 EPOS 定位控制的技巧。最后,专栏揭示了优化 EPOS 定位控制策略,以显著提升系统性能的最佳实践。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【DIAdem 2020 测试数据高效管理】:专业组织与检索秘籍大公开
参考资源链接:[DIAdem 2020中文教程:交互式数据分析与技术支持详解](https://wenku.csdn.net/doc/70ippcsgku?spm=1055.2635.3001.10343)
# 1. DIAdem 2020 测试数据管理概述
数据是现代测试与测量行业的生命线,而数据管理则是确保这些生命线得以高效利用的关键。在本章中,我们将首先探
CAM350优化方案:提高检查效率的10大策略
参考资源链接:[CAM350检查开短路](https://wenku.csdn.net/doc/6469cf105928463033e20285?spm=1055.2635.3001.10343)
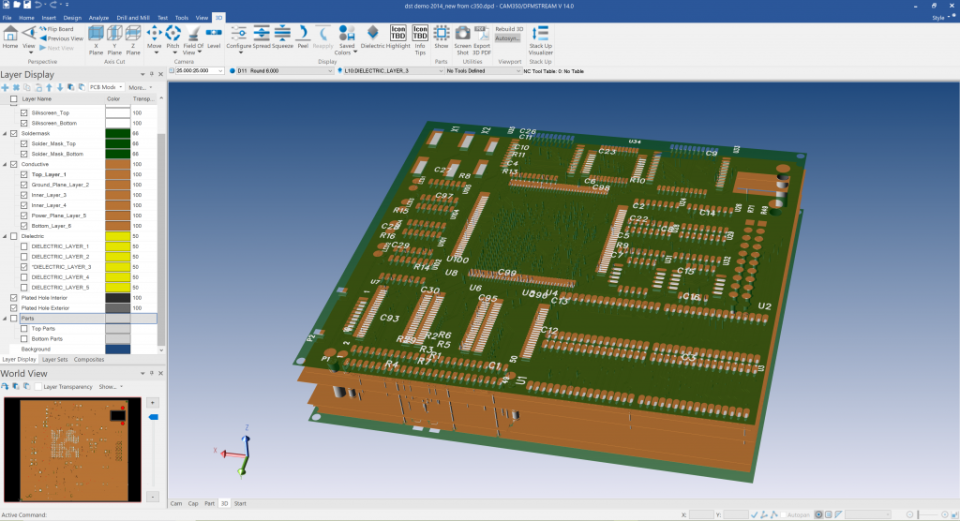
# 1. CAM350软件概述
## 1.1 CAM350软件简介
CAM350是业内广泛使用的一款PCB制
个性化界面与工具栏设置:Geomatica 2020定制指南的精髓
参考资源链接:[PCI Geomatica2020中文用户手册:从入门到精通](https://wenku.csdn.net/doc/32ehwsi2un?spm=1055.2635.3001.10343)
# 1. Geomatica 2020概览与定制基础
Geomatica 2020是一款功能强大的地理信息系统(GIS),专注于提供精确的数据分析和处理能力。对于5
企业微信与OAuth2.0深度解析:授权模式与身份校验不再难
参考资源链接:[企业微信网页授权登录流程与code获取详解](https://wenku.csdn.net/doc/5g294iatg3?spm=1055.2635.3001.10343)
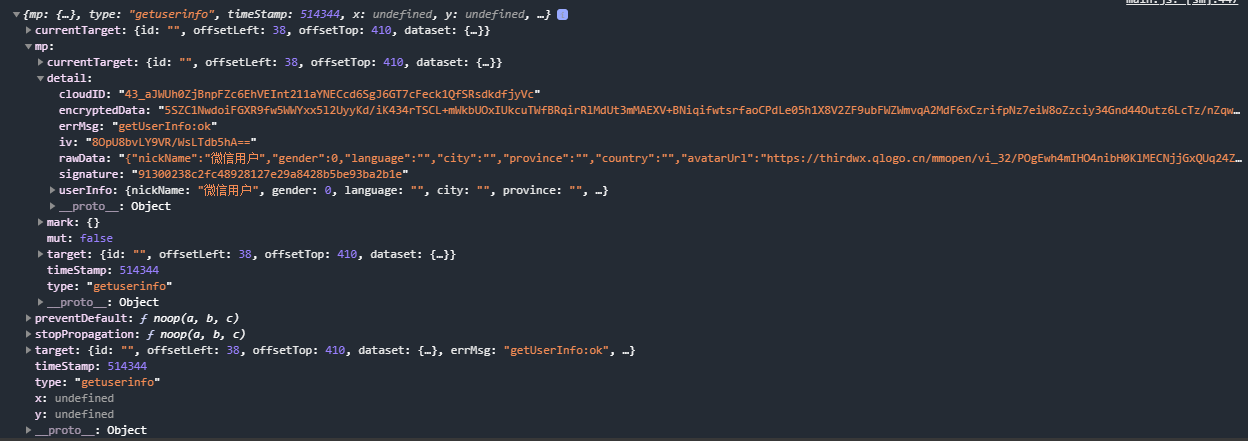
# 1. 企业微信与OAuth2.0概览
企业微信作为一款企业级
【SPD标准化解读】:深入分析JEDEC JESD400-5中的内存参数

参考资源链接:[DDR5 SPD规格:JEDEC JESD400-5详解](https://wenku.csdn.net/doc/6r5mbz0dzf?spm=1055.2635.3001.10343)
# 1. 内存标准化概述
内存标准化是确保内存组件可以跨不同硬件平台和操作系统兼容使用的关键。标准化不仅仅简化了硬件设计和制造过程,还为最终用户提供了稳定性和可靠性保障。本章
【HFSS 3D Layout多物理场耦合】:电路设计中的热-电耦合问题解决方案
参考资源链接:[HFSS 3D Layout用户手册:全面指南](https://wenku.csdn.net/doc/6412b6edbe7fbd1778d48793?spm=1055.2635.3001.10343)
# 1. HFSS 3D Layout基础概述
## 1.1 HFSS 3D Layout简介
HFSS 3D Layout是
SystemVerilog 3.1a测试平台开发:专家级测试用例编写秘诀

参考资源链接:[SystemVerilog 3.1a语言参考手册:PDF中文版详解与特性概览](https://wenku.
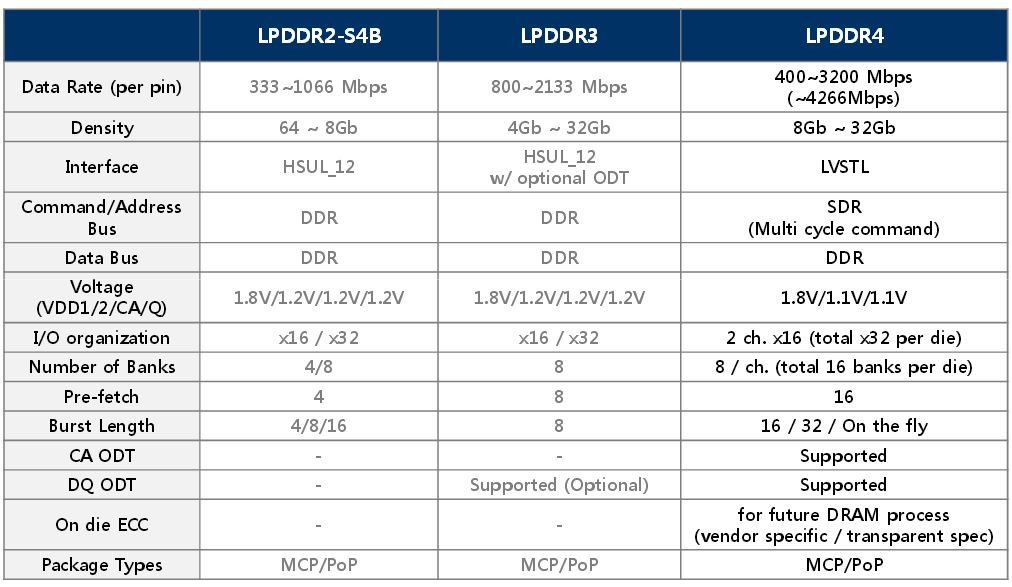
LPDDR4 vs LPDDR3:揭秘JESD209-4D标准下的性能突破
参考资源链接:[JESD209-4D - LPDDR4](https://wenku.csdn.net/doc/53k2xuc4ts?spm=1055.2635.3001.10343)
# 1. LPDDR4与LPDDR3技术概述
## 1.1 LPDDR技术的引入及其重要性
LPDDR(Low Power Double Data
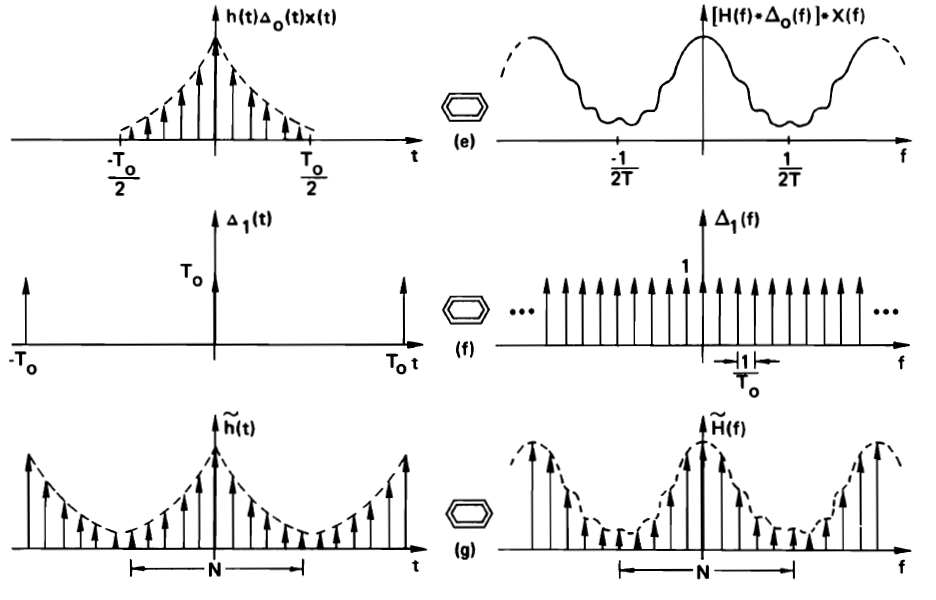
【噪声消除神技】:FK变换在地震信号增强中的实际效能
参考资源链接:[Lupei Zhu教授的FK工具包:水平分层模型格林函数计算与地震图合成教程](https://wenku.csdn.net/doc/6412b70abe7fbd1778d48e0d?spm=1055.2635.3001.10343)
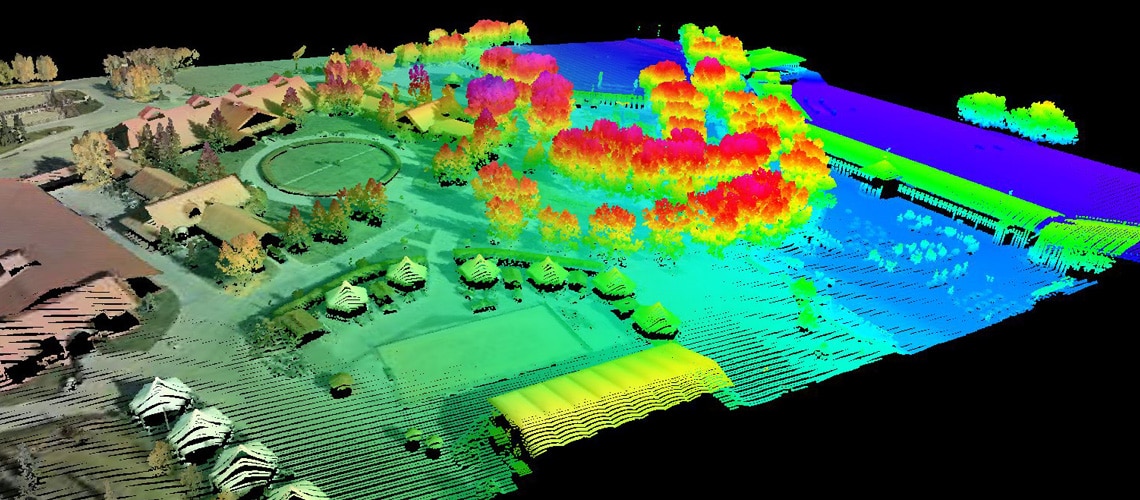
# 1. 地震信号处理概述
在地震学研究中,地震信号处理是关键的环节,其目的是提高信号的识别精度,进而为地质结构的分析提供更为准确的数据支持。传统的地震数据处理方法主要集中在时间域和频率域。然而,随着研究的深
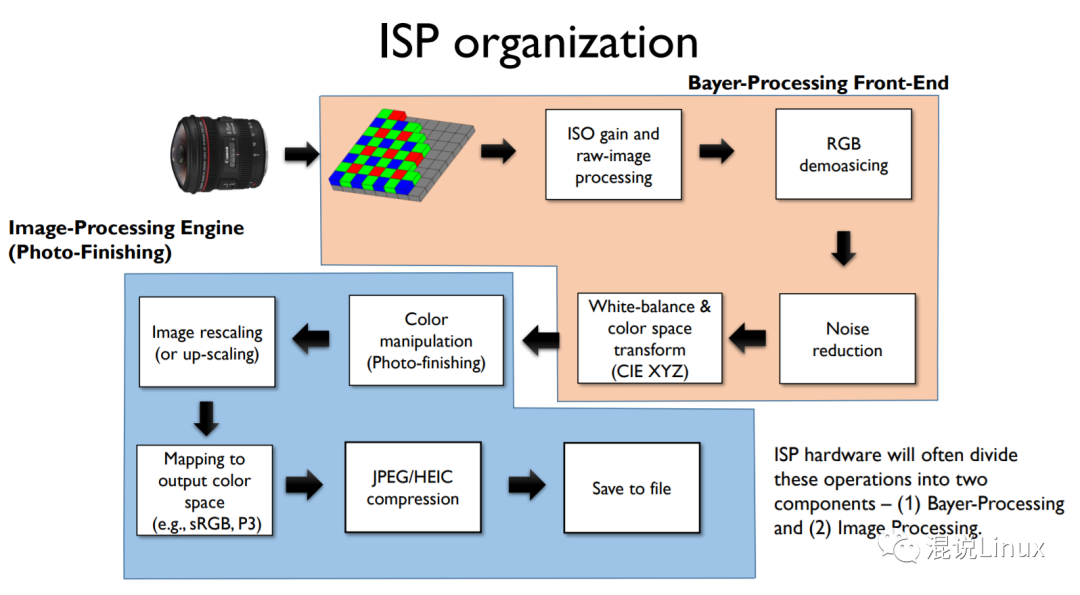
ISP图像调优进阶篇:掌握高级参数,优化图像质量的专家级指南(高级调优必备)
参考资源链接:[海思ISP图像调优指南](https://wenku.csdn.net/doc/7wdj2zcgcp?spm=1055.2635.3001.10343)
# 1. ISP图像调优的基础理解与应用
在当今数字化时代,图像信号处理器(ISP)作为智能设备中不可或缺的一部分,承担着将原始图
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )