【中断管理深度解析】:优化CHIBIOS-3.0.4中断优先级与调度
发布时间: 2024-12-21 16:44:08 阅读量: 6 订阅数: 7 

CHIBIOS-3.0.4-RT-ReferenceManual-v3.0.4

# 摘要
中断管理是实时操作系统中的关键组成部分,直接影响系统的性能和稳定性。本文首先介绍了中断管理的理论基础,进而深入分析了CHIBIOS-3.0.4中断系统的架构,包括中断管理的角色、功能、优先级配置及中断服务程序(ISR)的设计原则。接着,探讨了中断优先级与调度优化实践,强调了优化策略和调度策略在实际案例中的应用。此外,本文还探讨了高级中断管理技术,如中断嵌套、虚拟化以及硬件抽象层(HAL)的作用,并分析了中断性能的分析与调优方法。文中还详细讨论了CHIBIOS中断管理的常见问题及其解决方案,最后展望了未来中断管理技术的发展趋势,包括新型中断控制器的研究进展、中断管理与安全问题以及人工智能在中断调度中的应用。
# 关键字
中断管理;CHIBIOS;中断优先级;实时操作系统;调度优化;中断性能调优
参考资源链接:[ChibiOS/RT 3.0.4 RT Reference Manual: APM操作系统的系统概念与测试](https://wenku.csdn.net/doc/355chypzpb?spm=1055.2635.3001.10343)
# 1. 中断管理的理论基础
## 1.1 中断管理的重要性
中断管理是操作系统设计的核心要素之一,它允许处理器响应外部事件和内部条件的改变。在实时操作系统中,它确保系统能迅速处理紧急任务,维持任务调度的及时性和系统资源的有效分配。
## 1.2 中断的分类和功能
中断可以根据其来源分为硬件中断和软件中断。硬件中断主要由外部设备发出,如键盘、定时器或I/O设备,用以请求处理器的服务;软件中断则由程序内部发起,通常用于执行特定的系统调用。中断管理的主要功能包括快速响应外部事件、实现任务切换以及协调并行处理的优先级。
## 1.3 中断处理流程
当中断发生时,处理器会完成当前指令的执行,保存当前进程的状态,然后跳转到中断服务程序(ISR)。在ISR中,处理器执行必要的任务,例如处理I/O请求或执行调度决策。完成处理后,处理器恢复被中断进程的状态,并返回到之前执行的地方继续执行。
通过以上章节的讨论,我们为深入分析CHIBIOS-3.0.4中断系统架构打下了理论基础,这将帮助我们更好地理解下一章节的具体实现和配置方法。
# 2. CHIBIOS-3.0.4中断系统架构
## 2.1 CHIBIOS中断管理概述
### 2.1.1 中断管理的角色和功能
中断管理是实时操作系统(RTOS)设计中的关键部分,它负责处理来自硬件和软件的中断请求,确保系统能够及时响应外部事件。在CHIBIOS-3.0.4中,中断管理承担了以下几个核心角色:
- **响应性**:确保高优先级中断能够快速抢占低优先级任务,实现对关键事件的快速响应。
- **资源管理**:合理地分配和调度中断服务程序(ISR)的执行时间,避免资源冲突和优先级倒置。
- **系统稳定性**:通过合理的中断优先级和管理策略,保证系统的稳定性和可靠性。
中断管理模块的主要功能可以概括为:
- **中断服务程序的注册与注销**:使开发者能够定义和管理ISR。
- **中断优先级分配**:允许开发者设置不同中断源的优先级,以及在运行时动态调整。
- **中断屏蔽和使能**:提供机制来临时关闭某些中断,或重新启用。
- **中断嵌套支持**:允许高优先级中断打断低优先级中断的执行,以优先处理紧急事件。
### 2.1.2 中断优先级和向量表的概念
在CHIBIOS中,中断优先级是根据中断向量表来管理的。中断向量表是一个数据结构,它将每个可能的中断源与相应的中断服务程序关联起来,并为每个中断源指定了优先级。
- **中断优先级**:这个优先级定义了在有多个中断同时发生时,系统应该首先响应哪个中断。在CHIBIOS中,优先级可以是静态分配的,也可以在运行时动态调整。
- **向量表**:它是一张表格,通常位于内存的固定位置,包含指向ISR代码的指针和中断优先级。当中断发生时,处理器直接跳转到向量表中相应的入口点执行ISR。
向量表中的中断优先级由一个固定位数的值来表示,数值越小,优先级越高。这意味着中断0(通常是最先列出的向量)具有最高的优先级。
## 2.2 中断服务程序(ISR)设计原则
### 2.2.1 编写高效ISR的要求
编写高效的中断服务程序(ISR)对于保证系统的实时性和性能至关重要。ISR通常需要满足以下设计原则:
- **最小化执行时间**:ISR应该尽可能快地完成,避免长时间占用CPU资源。
- **原子性操作**:ISR中的操作应该是原子性的,以避免潜在的竞态条件。
- **避免阻塞调用**:在ISR中通常不执行会导致任务调度或等待的阻塞调用。
举个例子,在CHIBIOS中,一个典型的ISR可能看起来如下:
```c
/**
* @brief A sample ISR function.
*/
static void my_isr(void) {
/* 关闭中断以避免竞态条件 */
chSysDisable();
/* 处理中断事件 */
/* 任务唤醒代码(如有必要) */
/* 重新启用中断 */
chSysEnable();
}
```
### 2.2.2 中断服务与任务调度的协调
在实时系统中,中断服务程序通常需要与任务调度器协调工作。ISR可能需要唤醒一个或多个任务来处理中断事件的后处理。在CHIBIOS中,这个过程通常涉及信号量或事件标志的使用。
这里是一个简单的例子,展示如何在ISR中使用信号量唤醒一个任务:
```c
/** Signal event structure for the semaphore */
static SEMAPHORE_DECL(my_semaphore, 0);
/** ISR that signals a semaphore */
static void my_isr(void) {
/* Signal the semaphore */
chSemSignalI(&my_semaphore);
}
```
然后,在任务中,可以通过等待这个信号量来处理中断事件:
```c
void my_task(void *p) {
chRegSetThreadName("myTask");
while (TRUE) {
/* 等待信号量 */
chSemWait(&my_semaphore);
/* 中断事件处理 */
}
}
```
## 2.3 CHIBIOS中断优先级配置
### 2.3.1 静态和动态优先级配置方法
在CHIBIOS中,中断优先级的配置可以分为静态和动态两种方式。
- **静态配置**:开发者在系统初始化阶段定义好中断优先级,并将其固化到程序中。这种方式通常在编译时就确定好了,不易更改。
- **动态配置**:CHIBIOS支持在系统运行时动态修改中断优先级。开发者可以通过API来调整特定中断源的优先级。
以下是动态修改中断优先级的一个代码示例:
```c
void change_interrupt_priority(void) {
/* 获取当前中断优先级 */
uint8_t current_priority = chSysGetPriorityX();
/* 设置新的优先级 */
chSysSetPriorityX((current_priority - 1) & CH.nnPRIMASK);
}
```
在这个例子中,`chSysGetPriorityX` 和 `chSysSetPriorityX` 是CHIBIOS提供的API函数,它们允许用户获取和设置当前任务的优先级。
### 2.3.2 优先级反转和优先级天花板协议
在多任务环境中,优先级反转是指一个低优先级的任务持有一个高优先级任务需要的资源时,会导致系统性能下降。为了处理这个问题,CHIBIOS采用了优先级天花板协议。
- **优先级反转**:当低优先级任务拥有一个高优先级任务所需的资源时,临时提升低优先级任务的优先级到最高请求资源任务的优先级。
- **优先级天花板协议**:为资源设定一个"天花板"优先级,当任务锁定该资源时,将其优先级提升至天花板优先级。
这种方法通过避免低优先级任务长时间占用高优先级任务需要的资源,来减少中断响应的延迟。
```c
void priority_天花板_protocol_example(void) {
/* 获取当前任务优先级 */
uint8_t current_priority = chSysGetPriorityX();
/* 获取资源的天花板优先级 */
uint8_t ceiling_priority = chResourceGetCeilingPriority(&my_resource);
/* 如果当前优先级低于天花板优先级,则提升优先级 */
if (current_priority < ceiling_priority) {
chSysSetPriorityX(ceiling_priority);
}
/* 处理资源 */
/* 释放资源后,恢复原优先级 */
chSysSetPriorityX(current_priority);
}
```
在上面的代码示例中,`chResourceGetCeilingPriority` 是一个假设的函数,用于获取资源的天花板优先级。`chSysSetPriorityX` 是用来动态调整当前任务优先级的函数。
以上内

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【用例图精进】:五个关键点优化机票预订系统设计

# 摘要
本文探讨了用例图在机票预订系统开发中的应用和重要性。首先,文章阐述了用例图在需求分析阶段的作用,包括识别参与者和明确系统功能需求。接着,详细描述了如何设计和构建机票预订系统的用例图,涵盖基本元素的表示、构建步骤以及优化实践。进一步地,本文讨论了用例图在软件开发生命周期中的应用,包括与需求分析、系统设计以及软件测试的关系。最后,高级应用部分着重介绍了在复杂场景下用例图的设计,以及用例图与其它建模工具的协同工作,并分享了相关工具和技术的选择与应用。
# 关
精通Hypermesh网格划分技巧:提升CAE工作效率的秘密武器
# 摘要
Hypermesh作为一款先进的有限元前处理工具,广泛应用于CAE(计算机辅助工程)中进行高效的网格划分。本文首先介绍网格划分的基础知识与理论,并详细阐
【LMS算法终极指南】:掌握从理论到应用的10大关键步骤
# 摘要
LMS(最小均方)算法是一种广泛应用于自适应滤波的算法,其重要性在于能够在线性系统中对信号进行有效处理,如信号消噪、系统建模和通信系统均衡。
【比例因子调整指南】:模糊控制器性能提升的5个实用技巧

# 摘要
本文深入探讨了模糊控制器中比例因子的基础知识、调整策略以及实践经验。首先介绍了模糊逻辑控制器的工作原理及其基本结构,随后阐述了比例因子的作用与重要性,并提供了调整
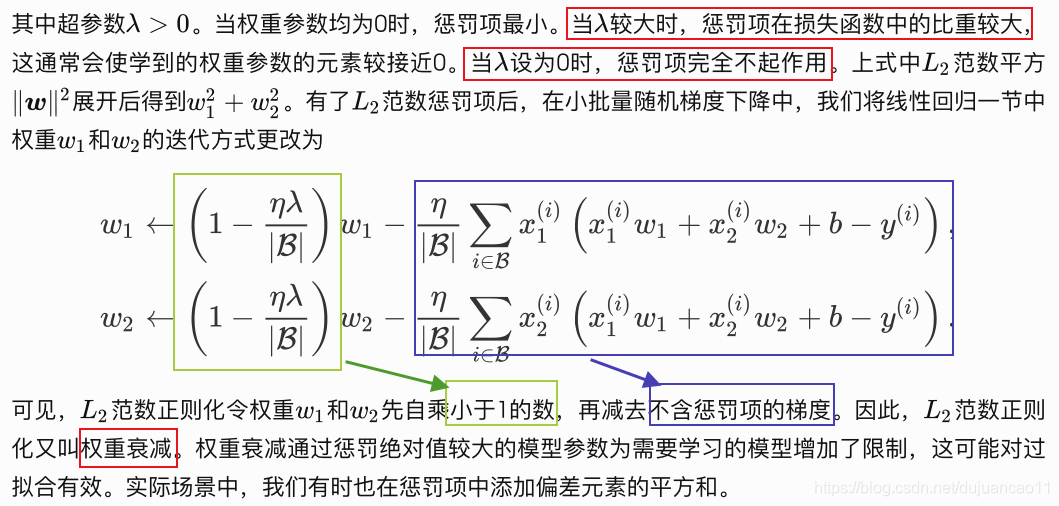
线性回归深度剖析:吴恩达课程带你掌握数学之美(关键应用解析)

# 摘要
本文全面介绍线性回归模型的理论基础与应用实践。首先,探讨线性回归的基本概念和数学基础,包括线性代数、概率论以及优化理论,奠定模型的理论支撑。随后,详细阐述线性回归模型的建立、评估方法、优化与选择策略,为读者提供模型构建到评估的完整流程。接着,分析线性回归在实际数据分析中的应用,包括数据预处理、特征工程以及在著名课程中的案例解析。最后,探讨线性回归模型的优化与扩展,讨论非线性关系处理和高维数据降维等进阶应用,为深度学
DyRoBeS软件自动化脚本编写秘籍:提升工作效率的10大技巧
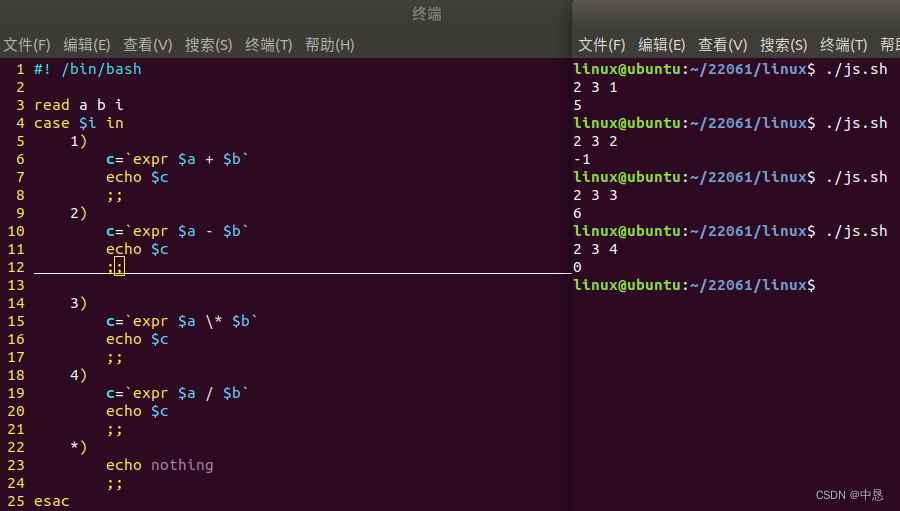
# 摘要
DyRoBeS软件自动化脚本在提高工作效率、优化流程管理方面发挥着重要作用。本文首先概述了DyRoBeS脚本的基本概念、结构和组成,接着深入探讨了其语法细节和模块化设计原理。在自动化实践技巧部分,本文详细介绍了提高脚本可读性、调试、性能优化和异常处理的方法。此外,本文还涵盖了自定义函数、扩展功能以及在特定场景下的应用技巧。最后一章通过案例分析,评估了DyRoBeS脚本在不同行业的应用
【工业自动化中的PLC应用】:案例分析与应用技巧
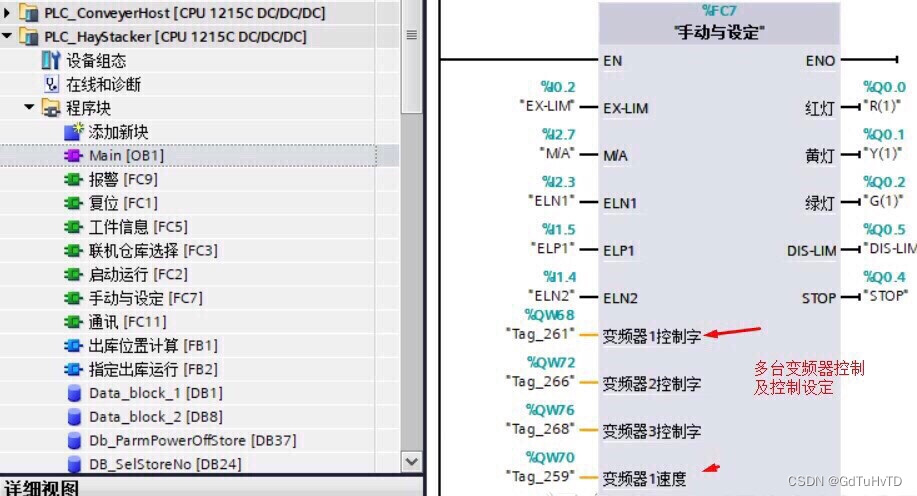
# 摘要
本文综述了PLC在工业自动化中的基础与应用,探讨了PLC的硬件架构、编程理论和实践技巧,并分析了工业自动化案例。文中详述了PLC的输入/输出模块、CPU、存储器等硬件组件,选型策略,以及与工业网络的集成和通讯协议。同时,阐述了PLC编程语言和标准、编程技巧,并通过实际应用案例,如连续生产过程控制、离散制造业自动化和物料搬运系统自动化,展示了PLC技术的实际应用。此外,本文还讨论了P
凸优化案例大揭秘:一步步教你解决实际问题
# 摘要
本文旨在全面阐述凸优化的基础理论、数学建模、算法实现、在机器学习及工程问题中的应用和高级主题。首先,介绍了凸优化的基本概念和数学建模,涵盖了凸集、凸函数、线性和二次规划等。随后,深入探讨了多种凸优化算法,包括梯度下降法、内点法、椭圆算法以及对偶理论和增广拉格朗日法。在应用方面,本文详细介绍了凸优化在机器学习中的角色,特别是在正则化、支持向量机和损失函数优化中的实际应用。此外,工程领域中的凸优化应用实例,如
解密JavaWeb会话管理:从Cookie到Session的全过程,全方位防范风险

# 摘要
JavaWeb会话管理是构建动态网站不可或缺的技术,它依赖于Cookie和Session机制来跟踪用户状态。本文详细介绍了Cookie的工作原理、安全性问题及高级应用,并探讨了Session的工作机制、存储方案和用户认证方式。文章进一步阐述了Cookie与Session集成策略,强调了协同工作和风险防范的重要性。最后,文章识别了会话管理中
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )