Matlab高斯白噪声在信号处理中的应用:从噪声消除到信号增强,解锁信号处理新境界
发布时间: 2024-06-15 11:22:21 阅读量: 14 订阅数: 15 
# 1. 高斯白噪声的理论基础**
高斯白噪声是一种时域上具有恒定功率谱密度的随机信号。它在频率域上是平坦的,这意味着它在所有频率上都具有相同的功率。高斯白噪声是信号处理中一种重要的工具,因为它可以模拟许多现实世界中的信号,例如热噪声和量子噪声。
高斯白噪声的概率密度函数由正态分布给出,即:
```
p(x) = (1 / (σ√(2π))) * e^(-(x - μ)^2 / (2σ^2))
```
其中,μ 是均值,σ 是标准差。
# 2. 高斯白噪声在信号处理中的应用
高斯白噪声在信号处理领域有着广泛的应用,主要体现在噪声消除和信号增强两个方面。
### 2.1 噪声消除
噪声是信号处理中不可避免的问题,它会影响信号的质量和可理解性。高斯白噪声具有平坦的功率谱密度,这意味着它在所有频率上都具有相同的功率,因此它可以作为一种有效的噪声模型。
#### 2.1.1 维纳滤波
维纳滤波是一种经典的噪声消除技术,它利用噪声的统计特性来估计和去除噪声。维纳滤波器是一个线性滤波器,其传递函数由以下公式给出:
```
H(f) = G(f) / (G(f) + N(f))
```
其中:
* `H(f)` 是维纳滤波器的传递函数
* `G(f)` 是信号的功率谱密度
* `N(f)` 是噪声的功率谱密度
维纳滤波器通过放大信号相对于噪声的频率分量来消除噪声。
#### 2.1.2 卡尔曼滤波
卡尔曼滤波是一种递归滤波器,它可以估计动态系统的状态。卡尔曼滤波器利用系统状态的先验知识和观测值来更新其状态估计。
在噪声消除应用中,卡尔曼滤波器可以估计信号的真实状态,并通过减去估计的噪声分量来消除噪声。卡尔曼滤波器对于处理非平稳噪声和时变系统特别有效。
### 2.2 信号增强
信号增强是指提高信号的信噪比(SNR)的过程。高斯白噪声可以作为一种信号模型,通过与信号相加来增强信号的能量。
#### 2.2.1 去噪自编码器
去噪自编码器是一种神经网络,它可以学习从噪声信号中重建干净信号。去噪自编码器由一个编码器和一个解码器组成,编码器将输入信号映射到一个低维潜在空间,解码器将潜在空间映射回原始信号空间。
在训练过程中,去噪自编码器通过最小化重建误差来学习噪声分布。一旦训练完成,去噪自编码器就可以用于从噪声信号中去除噪声。
#### 2.2.2 生成对抗网络
生成对抗网络(GAN)是一种生成式神经网络,它可以学习从给定的数据分布中生成新的样本。在信号增强应用中,GAN可以生成与原始信号相似的干净信号。
GAN由两个网络组成:生成器和判别器。生成器生成新的样本,而判别器则区分生成的样本和真实的样本。在训练过程中,生成器和判别器相互竞争,直到生成器能够生成与真实样本无法区分的样本。
一旦训练完成,GAN的生成器就可以用于生成干净的信号,从而增强原始信号。
# 3. Matlab中高斯白噪声的生成和处理
### 3.1 高斯白噪声的生成
在Matlab中,可以使用`randn`函数生成高斯白噪声。`randn`函数会生成一个均值为0,标准差为1的正态分布随机数矩阵。要生成高斯白噪声,需要对正态分布随机数进行归一化处理,使其均值为0,方差为1。
```
% 生成一个1000个点的正态分布随机数
x = randn(1, 1000);
% 对正态分布随机数进行归一化处理
x = x / std(x);
% 查看归一化后的随机数的均值和方差
mean(x)
var(x)
```
### 3.2 高斯白噪声的频域分析
高斯白噪声的频域特性是平坦的,即在所有频率上的功率谱密度相等。可以使用傅里叶变换对高斯白噪声进行频域分析。
```
% 对高斯白噪声进行傅里叶变换
X = fft(x);
% 计算功率谱密度
Pxx = abs(X).^2 / length(x);
% 绘制功率谱密度曲线
f = linspace(0, 1, length(Pxx));
plot(f, Pxx);
xlabel('频率 (Hz)');
ylabel('功率谱密度');
```
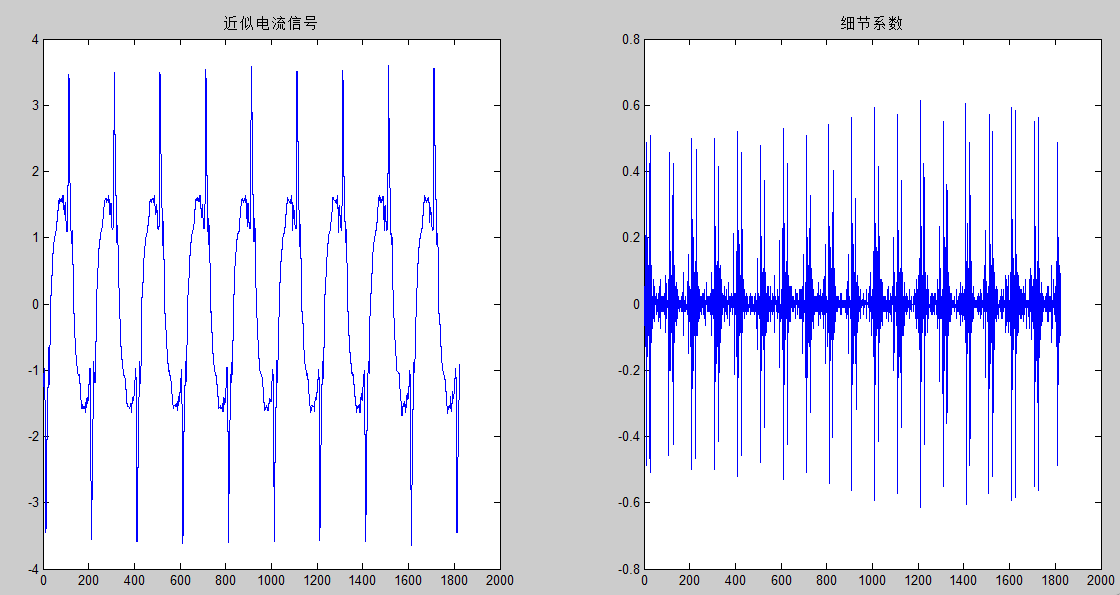
### 3.3 高斯白噪声的时域分析
高斯白噪声的时域特性是随机的,即在任何时刻的幅值都是不可预测的。可以使用自相关函数对高斯白噪声进行时域分析。自相关函数衡量了信号在不同时间点之间的相关性。
```
% 计算高斯白噪声的自相关函数
acf = xcorr(x, x);
% 绘制自相关函数曲线
lag = -length(x) + 1:length(x) - 1;
plot(lag, acf);
xlabel('滞后 (采样点)');
ylabel('自相关系数');
```
# 4. 基于高斯白噪声的信号处理算法
### 4.1 噪声消除算法
噪声消除算法是利用高斯白噪声的特性来消除信号中的噪声。常见的噪声消除算法包括维纳滤波算法和卡尔曼滤波算法。
#### 4.1.1 维纳滤波算法
维纳滤波算法是一种最优线性滤波器,它通过最小化信号和噪声的均方误差来估计原始信号。其基本原理是将输入信号与噪声模型进行卷积,然后通过一个滤波器对卷积结果进行加权平均。
**代码块:**
```python
import numpy as np
from scipy.signal import wiener
# 输入信号
signal = np.array([1, 2, 3, 4, 5])
# 噪声
noise = np.random.normal(0, 1, len(signal))
# 噪声信号
noi
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 赠618次下载
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 MATLAB 中高斯白噪声的各个方面,从生成到分析再到滤波。它揭示了伪随机数和正态分布在白噪声生成中的关键作用,并提供了详细的时域和频域分析,以了解白噪声的特性。此外,专栏还介绍了各种滤波器设计和实现技术,帮助读者掌握噪声消除和信号增强的利器。通过深入了解高斯白噪声的仿真、生成和滤波,读者可以解锁信号处理和图像处理中的新境界,并掌握随机信号的本质。
专栏目录
最低0.47元/天 解锁专栏
赠618次下载
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python中sorted()函数的代码示例:实战应用,巩固理解

# 1. Python中sorted()函数的基本用法
sorted()函数是Python中用于对可迭代对象(如列表、元组、字典等)进行排序的内置函数。其基本语法如下:
```python
sorted(iterable, key=None, re
Python调用Shell命令的性能分析:瓶颈识别,优化策略,提升执行效率

# 1. Python调用Shell命令的原理和方法
Python通过`subprocess`模块提供了一个与Shell交互的接口,
Python数据写入Excel:行业案例研究和应用场景,了解实际应用

# 1. Python数据写入Excel的理论基础
Python数据写入Excel是将数据从Python程序传输到Microsoft Excel工作簿的过程。它涉及到将数据结构(如列表、字典或数据框)转换为Excel中表格或工作表的格式。
数据写入Excel的理论基础包括:
- **数据格式转换:**Python中的数据结构需要转换为Excel支持的格式,如文
Python字符串操作:strip()函数的最佳实践指南,提升字符串处理技能

# 1. Python字符串操作基础
Python字符串操作是处理文本数据的核心技能。字符串操作基础包括:
- **字符串拼接:**使用`+`运算符连接两个字符串。
- **字符串切片:**使用`[]`运算符获取字符串的子字符串。
- **字符串格式化:**使用`f`字符串或`format()`方法将变量插入字符串。
- **字符串比较:**使用`==`和`!=
Python读取MySQL数据金融科技应用:驱动金融创新
# 1. Python与MySQL数据库**
Python是一种广泛用于数据分析和处理的编程语言。它与MySQL数据库的集成提供了强大的工具,可以高效地存储、管理和操作数据。
**Python连接MySQL数据库**
要连接Python和MySQL数据库,可以使用PyMySQL模块。该模块提供了一个易于使用的接口,允许Python程序与MySQL服务器进行交互。连接参数包括主机、用户名、
Python数据可视化:使用Matplotlib和Seaborn绘制图表和可视化数据的秘诀
# 1. Python数据可视化的概述
Python数据可视化是一种利用Python编程语言将数据转化为图形表示的技术。它使数据分析师和科学家能够探索、理解和传达复杂数据集中的模式和趋势。
数据可视化在各个行业中都有广泛的应用,包括金融、医疗保健、零售和制造业。通过使用交互式图表和图形,数据可视化可以帮助利益相关者快速识别异常值、发现趋势并
Pandas 在人工智能中的应用:数据预处理与特征工程,为人工智能模型提供高质量数据
# 1. Pandas概述**
Pandas是一个开源的Python库,用于数据分析和操作。它提供了高效、灵活的数据结构和工具,使数据处理任务变得更加容易。Pandas基于NumPy库,并提供了更高级别的功能,包括:
* **DataFrame:**一个类似于表格的数据结构,可存储不同类型的数据。
* **Series:**一个一维数组,可存储单
Python EXE 与其他语言 EXE 的较量:优势、劣势与选择指南
# 1. Python EXE 简介**
Python EXE 是一种将 Python 脚本编译为可执行文件的工具,允许在没有安装 Python 解释器的情况下运行 Python 程序。它将 Python 脚本、所需的库和依赖项打包成一个独立的可执行文件,使其可以在任何具有兼容操作系统的计算机上运行。
通过使用 Python EXE,开发者可以轻松地将 Python
Python Requests库与云计算合作:在云环境中部署和管理HTTP请求,轻松自如
# 1. Python Requests库简介**
Requests库是一个功能强大的Python HTTP库,用于发送HTTP请求并获取响应。它简化了HTTP请求的处理,提供了高级功能,例如会话管理、身份验证和异常处理。Requests库广泛用于云计算、Web抓取和API集成等各种应用程序中。
Requests库提供了直观且易于
Macbook上Python科学计算:使用NumPy和SciPy进行数值计算,让科学计算更轻松

# 1. Python科学计算简介
Python科学计算是指使用Python语言和相关库进行科学和工程计算。它提供了强大的工具,可以高效地处理和分析数值数据。
Python科学计算的主要优势之一是其易用性。Python是一种高级语言,具有清晰的语法和丰富的库生态系统,这使得开发科学计算程序变得容易。
此外,Python科学计算
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
赠618次下载
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )