
BAO et al.: STEP-BY-STEP CONTROLLER DESIGN FOR LCL-TYPE GRID-CONNECTED INVERTER 1241
is adopted to damp the resonance peak caused by the LCL fil-
ter, and H
i1
is the feedback coefficient. Unipolar sinusoidal
pulsewidth modulation (SPWM) is used for the grid-connected
inverter. An outer-loop power control is usually introduced to
automatically adjust the current reference amplitude I
∗
.Thisis
beyond the scope of this paper and will not be discussed, and
the current reference amplitude I
∗
is directly given here.
The resonance frequency of the LCL filter f
r
is derived as
f
r
=
1
2π
L
1
+ L
2
L
1
L
2
C
. (1)
Fig. 1(b) shows the ASM of the LCL-type grid-connected in-
verter, where G
inv
is the transfer function of the inverter bridge.
The switching frequency of VSI is assumed to be sufficiently
high, thus G
inv
can be approximated as V
in
/V
tri
, where V
in
is
the dc-link voltage and V
tri
is the amplitude of the triangle car-
rier wave. According to Mason’s gain formula [32], the injected
grid current i
g
can be derived as
i
g
(s)=
1
H
i2
T (s)
1+T (s)
i
ref
(s) −
G
g
(s)
1+T (s)
v
g
(s)
Δ
= i
g1
(s)+i
g2
(s) (2)
where T (s) is the loop gain of the system and is expressed as
T (s)=
H
i2
G
inv
G
i
(s)
s
3
L
1
L
2
C + s
2
L
2
CH
i1
G
inv
+ s (L
1
+ L
2
)
(3)
and G
g
(s) is expressed as
G
g
(s)=
s
2
L
1
C + sCG
inv
H
i1
+1
s
3
L
1
L
2
C + s
2
L
2
CH
i1
G
inv
+ s (L
1
+ L
2
)
. (4)
i
g1
is related to the injected grid current reference i
ref
and i
g2
is related to the grid voltage v
g
. i
g1
and i
g2
are expressed as
i
g1
(s)=
1
H
i2
T (s)
1+T (s)
i
ref
(s) (5)
i
g2
(s)=−
G
g
(s)
1+T (s)
v
g
(s) . (6)
III. F
REQUENCY RESPONSES OF THE CURRENT REGULATOR
AND
CAPACITOR–CURRENT-FEEDBACK ACTIVE-DAMPING
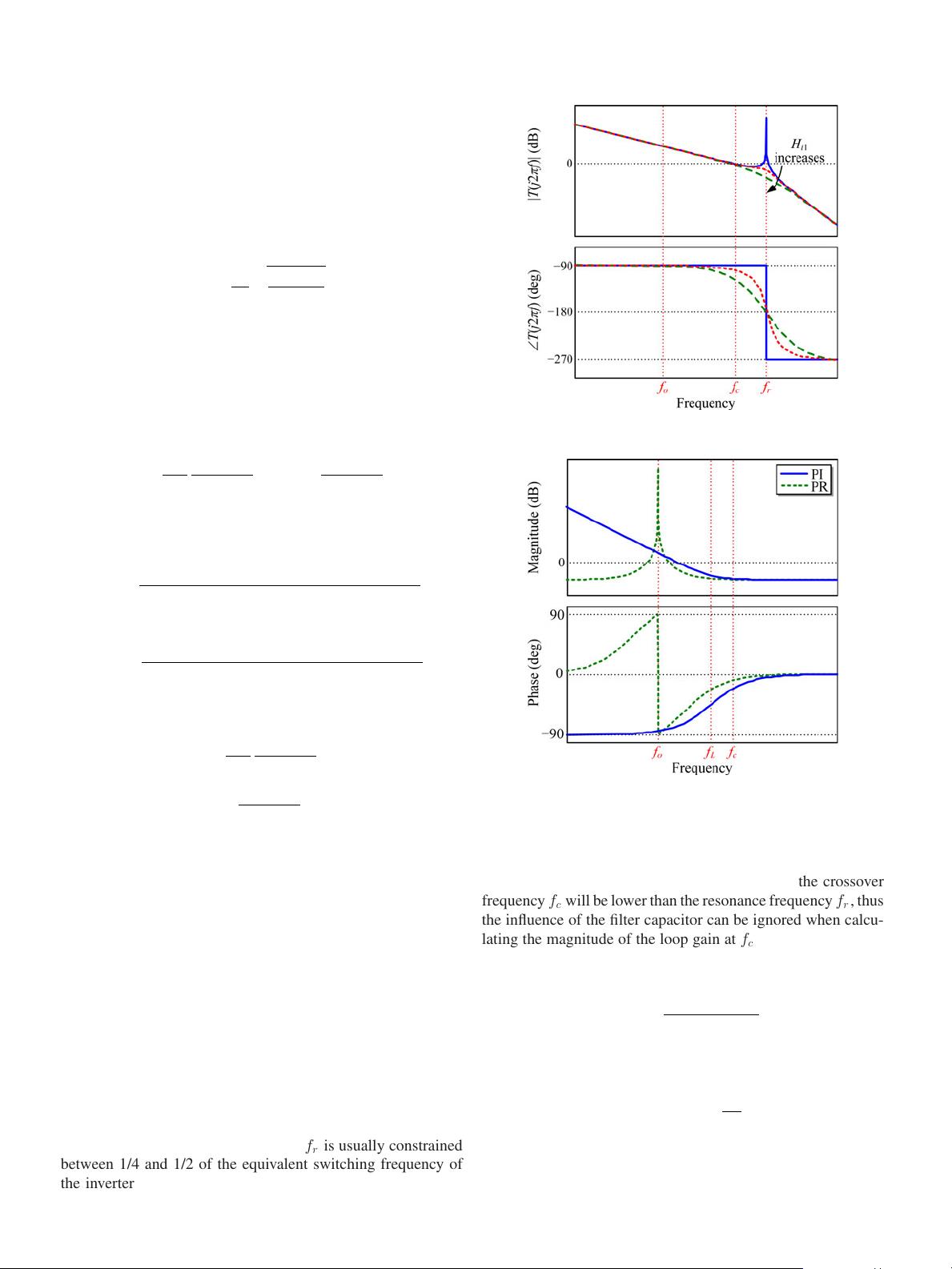
According to (3), the bode diagram of the uncompensated
loop gain is depicted in Fig. 2. As seen, introducing the feedback
of the filter capacitor current can effectively damp the resonance
peak, and it only affects the magnitude of the loop gain at
the neighbor of the resonance frequency. However, this active-
damping method has significant impact on the phase of the
loop gain and the phase decreases at the frequencies lower than
the resonance frequency. A larger capacitor–current feedback
coefficient leads to better damping of the resonance peak, but
results in a larger negative phase shift.
The crossover frequency f
c
is typically restricted lower than
f
s
considering the effect of attenuating high-frequency noise,
where f
s
is the switching frequency of the inverter [9], and the
resonance frequency of the LCL filter f
r
is usually constrained
between 1/4 and 1/2 of the equivalent switching frequency of
the inverter (when unipolar SPWM is adopted, the equivalent
Fig. 2. Bode diagram of the loop gain without compensation.
Fig. 3. Bode diagram of PI and PR compensators.
switching frequency is 2f
s
), for the sake of effective harmonics
suppression and good dynamic response. Therefore, for a prop-
erly designed LCL-type grid-connected inverter, the crossover
frequency f
c
will be lower than the resonance frequency f
r
, thus
the influence of the filter capacitor can be ignored when calcu-
lating the magnitude of the loop gain at f
c
and the frequencies
lower than f
c
, i.e., the magnitude of T (s) can be approximated
as
|T (s)|≈
H
i2
G
inv
G
i
(s)
s (L
1
+ L
2
)
. (7)
PI compensator is adopted as the injected grid current regu-
lator and the transfer function of G
i
(s) is given by
G
i
(s)=K
p
+
K
i
s
. (8)
According to (8), the bode diagram of PI compensator is
depicted in Fig. 3. As seen, at the frequencies around the corner
frequency f
L
which is expressed as f
L
= K
i
/(2πK
p
), the slope
剩余14页未读,继续阅读

mc470791823
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


