
TwinCAT NC PTP 实用教程 V5
- 16 -
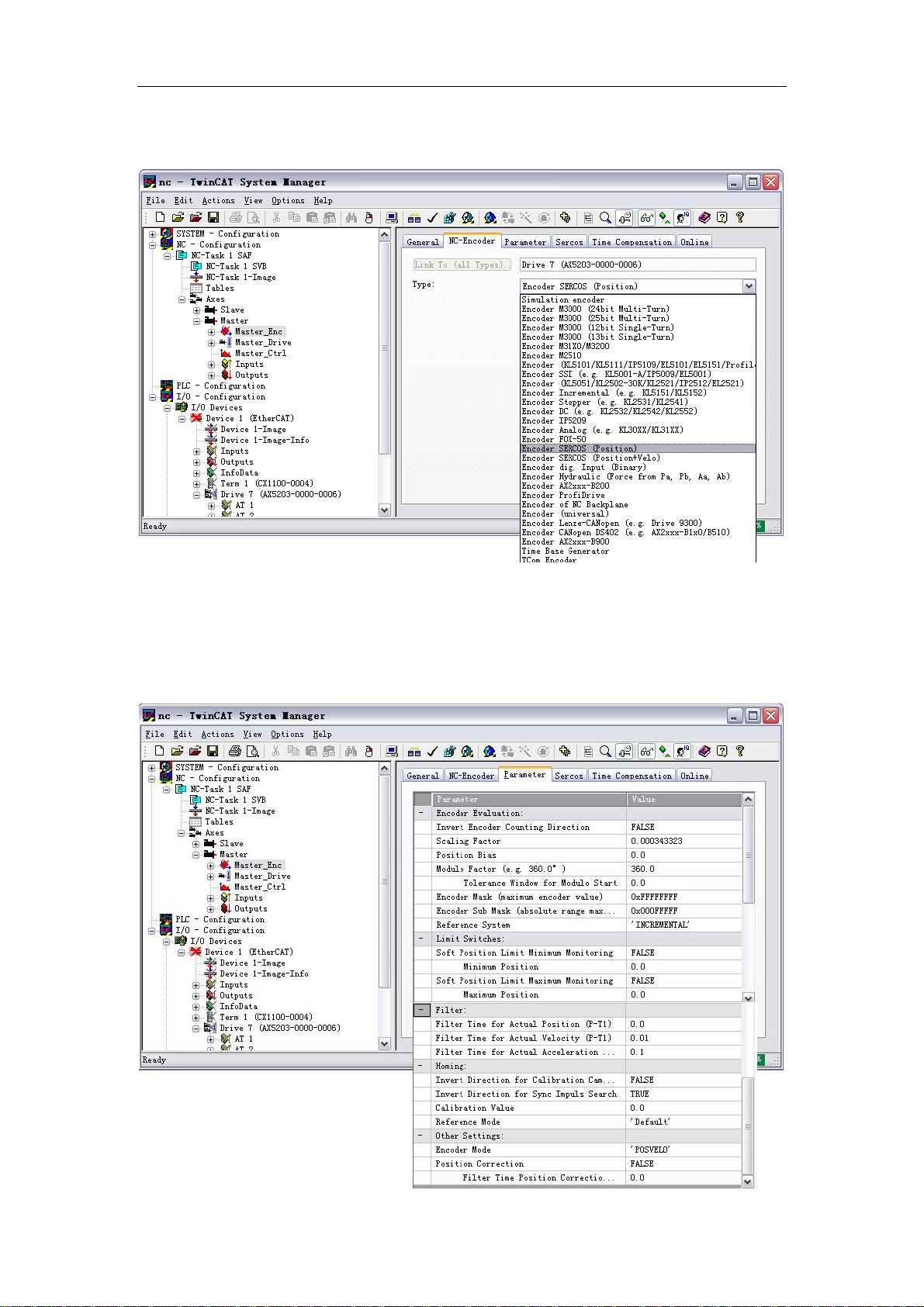
z NC-Encoder
在此面设置编码器种类,并链接到匹配的硬件。
当脉冲输出或者模拟量输出方式控制伺服轴时,位置反馈接到 I/O 端子,才需要配置此页。
而使用总线接口的伺服驱动器或者 KL2531/2541,不外接位置反馈时,就无需在此配置。
z Parameter
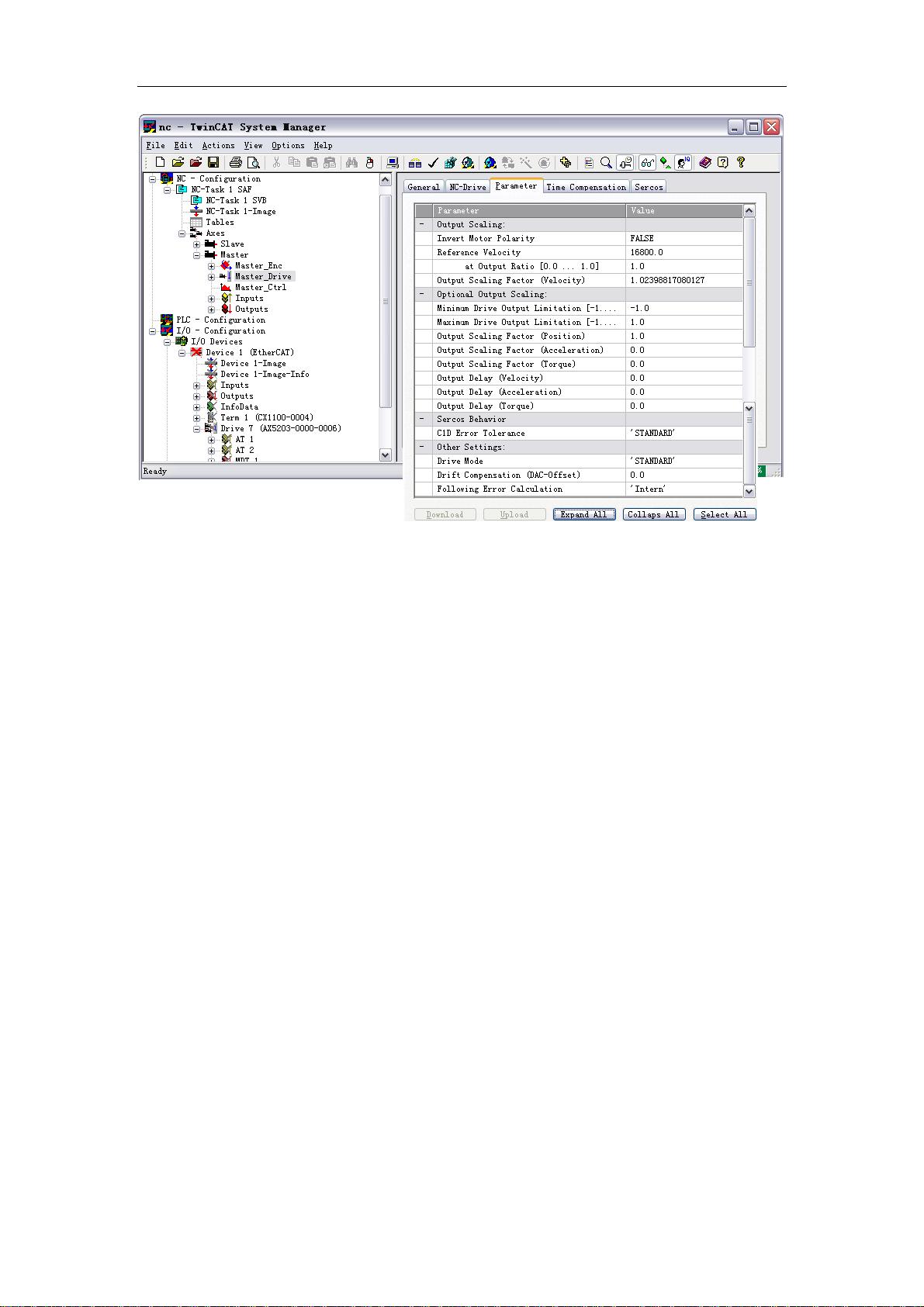
剩余225页未读,继续阅读

weixin_39932267
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


