基于单片机的自动寻迹小车设计与实现
需积分: 16 131 浏览量
更新于2024-07-21
1
收藏 1.21MB DOC 举报
"自寻迹小车是一种基于单片机控制的系统,通过红外光电传感器检测路面黑色轨迹,实现自动行驶。"
自寻迹小车的设计涉及到多个关键技术和硬件组件,主要包括以下几个方面:
1. **任务及要求**:
- 任务是构建一个能沿着黑色轨迹自动行驶的小车,它需要在接收到传感器信号后能实时调整行驶方向,确保不偏离轨迹。
2. **系统设计方案**:
- **小车循迹原理**:小车通过安装在车身上的红外光电传感器检测黑色轨迹,当传感器检测到黑色(相对于背景)时,表示小车正在轨迹上,反之则可能偏离。单片机接收这些信号并做出相应决策。
- **控制系统总体设计**:采用AT89C51单片机作为核心控制器,负责处理传感器数据,控制电机驱动,实现小车的自动循迹功能。
3. **系统方案**:
- **寻迹传感器模块**:主要使用ST188红外传感器,配合LM324比较器来检测黑色轨迹。ST188传感器能感应到不同颜色的反差,LM324比较器将传感器的模拟信号转换为数字信号供单片机处理。
- **控制器模块**:AT89C51单片机接收并处理来自传感器的信号,根据信号强度决定小车的行驶状态。
- **电源模块**:提供小车各部分所需电源,确保系统稳定运行。
- **电机及驱动模块**:使用直流电机提供动力,配合电机驱动电路来精确控制电机转速和方向,从而调整小车的行驶状态。
- **自动循迹小车总体设计**:整体电路图描绘了各个模块的连接关系,系统总体说明解释了各部分如何协同工作以实现自动寻迹。
4. **软件设计**:
- **PWM控制**:通过单片机产生PWM波来调节电机的速度,实现小车的无级调速。
- **总体软件流程图**:描述了软件执行的逻辑顺序,包括初始化、检测、判断和执行等步骤。
- **小车循迹流程图**:详细展示了小车如何根据传感器信号做出转向决策的过程。
- **中断程序流程图**:中断程序用于处理紧急情况或特定事件,例如传感器信号突然变化,以保证小车的稳定行驶。
- **单片机测序**:单片机的程序执行顺序,确保在不同阶段正确处理传感器输入和电机控制。
5. **参考资料**:
- 提供了进一步研究和设计改进的文献和资料。
通过以上设计,自寻迹小车可以实现自主导航,有效避免了人工干预,具有很高的实用价值和教育意义。这种技术广泛应用于机器人竞赛、自动化物流等领域。
自动循迹小车
1、主控制电路模块:用 AT89C51 单片机、复位电路,时钟电路
2、红外检测模块:光电传感器 ST188,比较器 LM324
3、电机及驱动模块:电机驱动芯片 L298N、两个直流电机
4、电源模块:双路开关电源
3.系统方案
3.1 寻迹传感器模块
ST系列反射式光电传感器是经常使用的传感器。这个系列的传感器种类齐
全、价格便宜、体积小、使用方便、质量可靠、用途广泛。
我们采用ST188作为红外检测传感器。
在黑线检测的测试中,若检测到白色区域,发射管发射的红外线没有反射
到接收管,测量接收管的电压为4.8V ,若检测到黑色区域,接收管接受到发
射管发射的红外线,电阻发生变化,所分得的电压也就随之发生变化,测的接
收管的电压为0.5V,测试基本满足要求。
判断有无黑线我们用的一块比较器LM324, 比较基准电压由30K的变阻器
调节,各个接收管的参数都不一致,每个传感器的比较基准电压也不尽相同,
我们为每个传感器配备了一个变阻器。
3.1.1 红外传感器 ST188 简介
含一个反射模块(发光二极管)和一个接收模块(光敏三极管)。通过发
射红外信号,看接收信号变化判断检测物体状态的变化。A、K之间接发光二极
管,C、E之间接光敏三极管(二者在电路中均正接,但要串联一定阻值的电
阻)
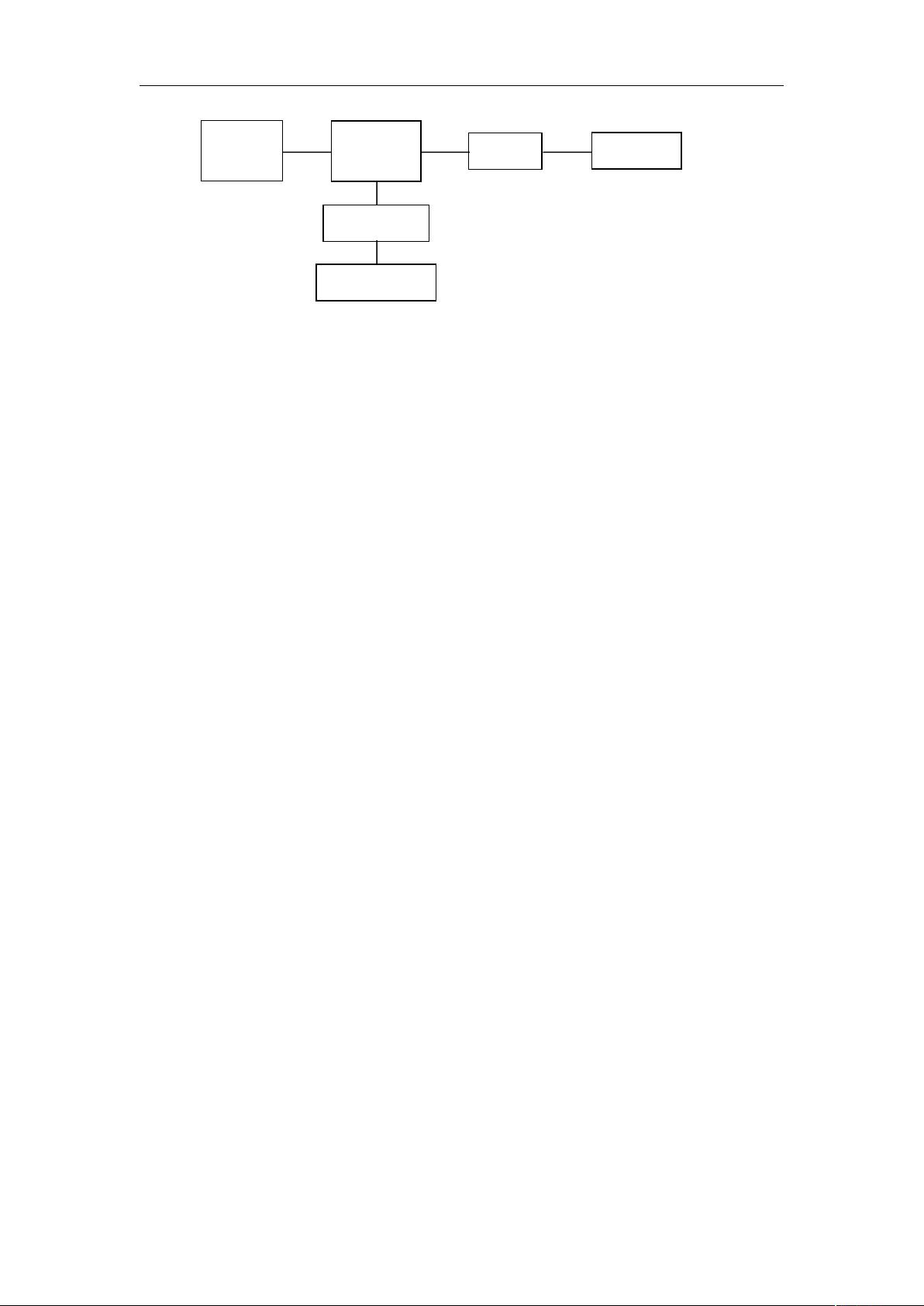
稳压电
源模块
主控芯片
AT89C51
L298
减速电机
光电传感器
电压比较器
图 2-1 控制系统的结构
框图
3
剩余17页未读,继续阅读
2009-10-14 上传
2009-08-27 上传
2023-09-17 上传
2023-03-13 上传
2023-10-17 上传
2023-04-05 上传
2023-10-02 上传
2023-05-13 上传
2023-06-08 上传

Joker_Choi
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
