基于51单片机的走迷宫机器人控制系统设计
需积分: 17 136 浏览量
更新于2024-09-15
收藏 164KB DOCX 举报
"走迷宫机器人——控制系统的设计"这一主题涵盖了自动导引小车(AGV)的基本原理和技术,主要由上海交通大学的钱真彦和苏稚英开发。该机器人的目标是实现自主导航,避开障碍,并选择正确的路径。它利用了反射式光电传感器来识别地面的导引线,并采用机械式传感器进行障碍检测。控制系统的核心是51单片机,通过光耦隔离以提高抗干扰能力。设计中,控制任务通过分时复用技术在单片机上完成,包括信号采集、路线判断和电机控制。
控制系统的设计主要包括三个方面:控制电路设计、传感器的选择与布局、以及程序编写。首先,传感器的数量应尽可能少,以减轻单片机的处理负担,同时确保机器人能够灵活地行驶。控制电路需要针对所选电机和传感器进行优化,强调稳定性和抗干扰性。
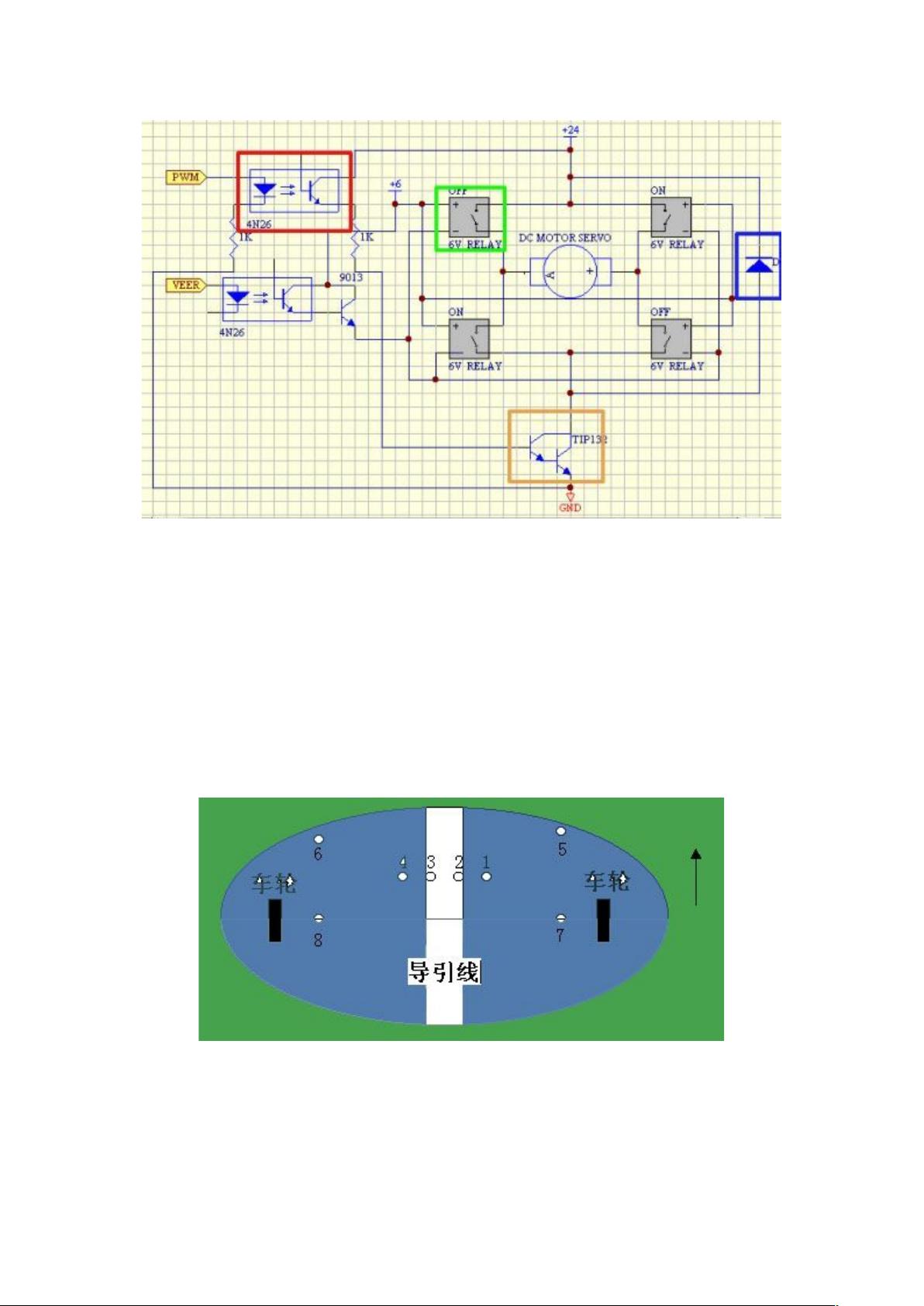
电路设计中,关键部分有电机驱动电路、单片机接口电路和电源电路。电机驱动电路与单片机及传感器之间使用光耦隔离,以防止电机大电流引起的电压波动干扰其他组件。传感器直接使用24V蓄电池供电,而单片机则通过7805稳压器将电压转换为5V。驱动电路采用两种调速方法:线性型和脉宽调制(PWM)。考虑到PWM调速的优点,如效率高、调速范围广、动态性能好等,系统选择了PWM方式。PWM调速又分为双向和单向两种模式,其中双向PWM调速电路在一个脉冲周期内,通过控制晶体管的导通时间来改变电机的平均电流方向,从而实现电机的正反转和速度调节。
程序设计方面,主要任务包括路径识别、障碍物检测和电机速度控制算法的实现。通过单片机编程,可以实现这些功能的逻辑控制,确保机器人能够在迷宫中有效地寻找出路。
此技术不仅适用于迷宫机器人,还可能应用于无人工厂、仓库的自动化运输,以及服务机器人的导航系统。通过深入理解和应用这些知识,可以推动自动化领域的进步,提高效率并减少人力需求。
图四
二、 传感器:
1、传感器的选择:
小车要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当与给小车一个视觉功
能。实现机器人的视觉功能有多种方式,有使用 44' 摄像头进行图象采集和识别方法,但是此方法,在
资金上耗费较多,而且还牵涉到图象采集,图象识别等领域,为了简单起见,使用多个反射式光电传感器。
反射式光电传感器的光源有多种,有来自于红外发光二极管,普通发光二极管,以及激光二极管,前两种
光源容易受到外界光源的干扰,而激光二极管发出的光的频率较集中,传感器只接收很小个频率范围内的
信号,不容易被干扰。对于障碍物的检测方面,可以使用超声波传感器,效果也较好,但相比之下,用机
械式的传感器(微动开关)价格便宜,使用方便,无需提供电源。
5
图五
2、传感器安放位置
()机械传感器:
放置在小车的最前端,当小车碰到障碍物后者墙壁时,机械传感器就能给单片机一个中断信号,通知单片
剩余10页未读,继续阅读
560 浏览量
149 浏览量
2011-02-25 上传
174 浏览量
点击了解资源详情
160 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情

DHexia
- 粉丝: 23
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现ART与SART算法在医学CT重建中的应用
- S2SH整合版:快速搭建Struts2+Spring+Hibernate开发环境
- 托奇卡项目团队成员介绍
- 提升外链发布效率的SEO推广神器——搜易达网络推广大师v2.035
- C#打造简易记事本应用详细教程
- 探索虚拟现实地图VR的奥秘
- iOS模拟器屏幕截图新工具
- 深入解析JavaScript在生活应用开发中的运用
- STM32F10x函数库3.5中文版详解与应用
- 猎豹浏览器v6.0.114.13396 r1:安全防护与网购敢赔
- 掌握JS for循环输出的最简洁代码技巧
- Java入门教程:TranslationFileGenerator快速指南
- OpenDDS3.9源码解析及最新文档指南
- JavaScript提示框插件:鼠标滑过显示文章摘要
- MaskRCNN气球数据集:优质图像识别资源
- Laravel日志查看器:实现Apache多站点日志统一管理
