UR机器人PolyScope 3.3.0安全与操作指南
需积分: 34 103 浏览量
更新于2024-07-09
收藏 3.71MB PDF 举报
PolyScope软件手册(版本3.3.0)是由Universal Robots A/S提供的一份详细指南,专注于UR机器人的操作和安全管理。该手册是基于中文翻译,包含了对UR机器人系统的关键设置和功能的介绍,旨在确保用户能够安全、有效地利用PolyScope软件进行编程、监控和维护。
1. 安全配置:这部分详述了如何配置机器人的安全参数,包括简介,可能涉及如何设置安全等级、紧急停止按钮的作用以及如何适应不同的工作环境。用户需要了解并遵循这些规则以防止事故的发生。
2. 更改安全配置:指南涵盖了如何在实际操作中调整和更新安全设置,可能涉及到安全边界的修改、安全功能的启用和禁用,以及如何根据任务需求灵活调整。
3. 安全同步和错误处理:这部分着重于确保软件与硬件之间的同步,以及在遇到错误时的处理方法。用户会学习到如何识别和解决可能导致机器人运行中断的问题。
4. 公差设定:介绍了机器人运动精度和允许的误差范围,这对于精确操作至关重要,如在自动化生产环境中,公差控制会影响产品质量。
5. 安全校验和:确保软件的完整性,可能包括定期的校验过程,以检测和修复潜在的安全漏洞或数据损坏。
6. 安全模式:讲解了不同级别的安全模式,如手动、自动和编程模式,以及在不同模式下操作机器人的方式和限制。
7. 自由驱动模式:针对高级用户,提供了在特定情况下解除部分安全限制的操作方法,但必须谨慎,以避免潜在风险。
8. 密码锁功能:说明了如何管理和使用密码保护,以保护重要的程序和设置免受未经授权的访问。
9. 应用场景:这部分总结了PolyScope软件在实际应用中的例子,帮助用户理解和优化其在自动化生产线、装配、检验等任务中的使用。
这份PolyScope软件手册是UR机器人用户的重要参考工具,它涵盖了从基础安全配置到高级功能操作的全面内容,旨在提高工作效率的同时保障操作人员的安全。阅读和理解此手册对于正确、高效地使用UR机器人是至关重要的。
10.12 边界
注意如果安全板和可配置输入都没有设置触发缩减模式,则缩减模式中的限制字段
会被禁用(详见 10.12和10.13)。
每个限制的公差和单位列于对应的行末。第一个公差值应用于最小值,第二个公差
值应用于最大值。由于将第一个公差与输入的最小值相加,以及将第二个公差值与
输入的最大值相减,而导致关节位置即将超过此范围时,如果继续沿预测的轨迹移
动,程序将中止执行。请注意,公差值所示的负号只是用于表明要从实际输入的值
中减去公差。但是,如果关节位置超过输入的范围,安全系统将实施 0 类停机。
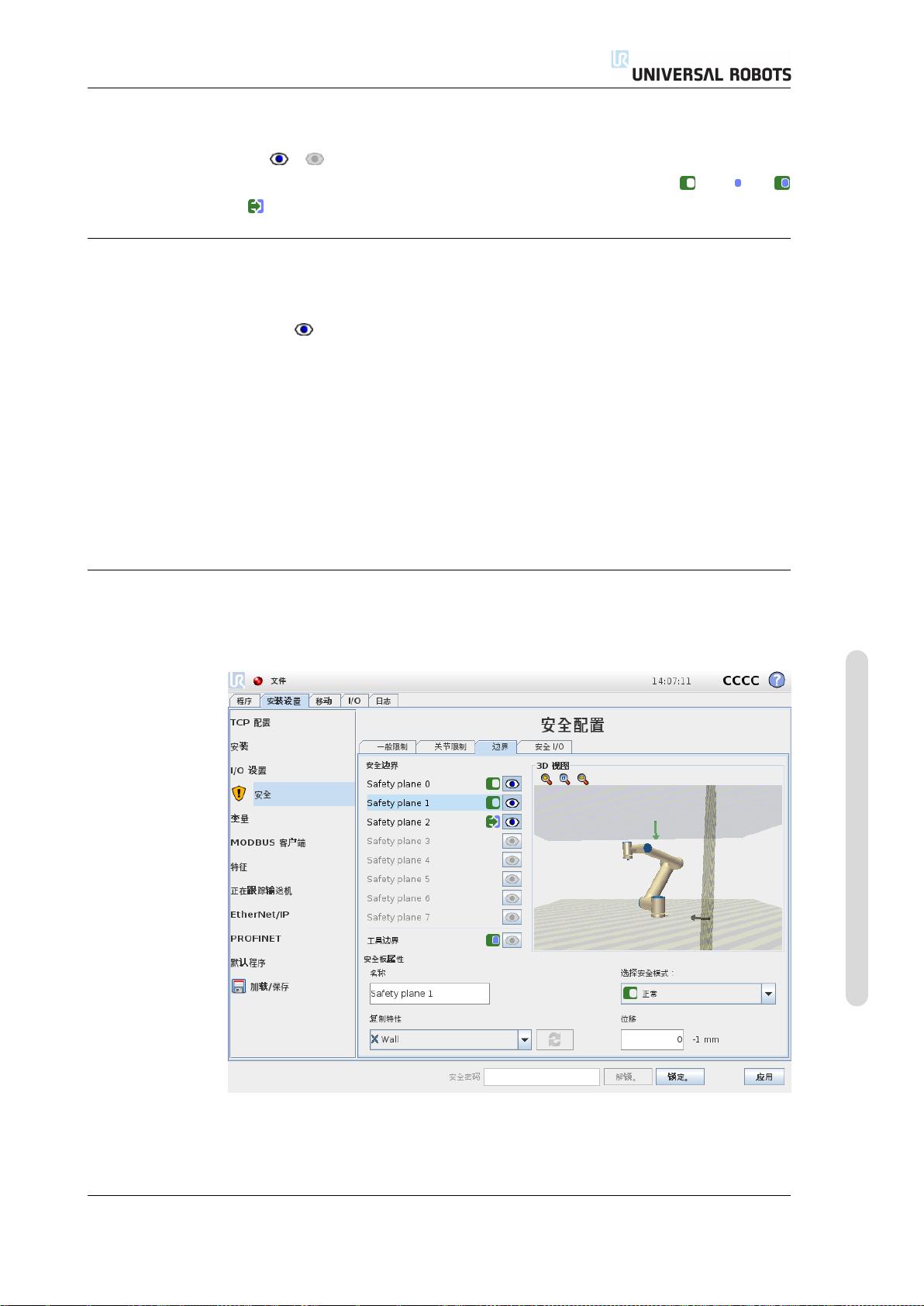
10.12 边界
你可以在该选项卡中对边界限制进行配置。边界限制由安全板及机器人工具方向的
最大允许偏离限制组成。还可以定义用于触发转化为缩减模式的平面。
强制使机器人 TCP 保持在被定义的板子的正确的一边,而不超过这些板子,通过
这一方法,安全板可用于限制机器人的允许工作空间。最多可配置 8 块安全板。工
具方向的限制可用于确保机器人工具方向与理想的方向的偏差不超过某一指定的数
量。
警告:
定义安全平面只限制 TCP,对机器人手臂的整体限制无影响。这
意味着虽然指定了安全平面,但并不保证机器人手臂的其他部分也
遵循该限制。
每一个边界限制都是根据当前机器人安装定义的属性之一进行配置的 (请 参
阅 13.12)。
注意:
强烈建议在编辑安全配置前,先创建配置所需的所有边界限制的所
有特征,并为其指定适当的名称。请注意,由于安全选项卡解锁后
将切断机器人手臂的电源,因此工具特征(包含机器人 TCP 的当
前位置和方向)以及自由驱动模式(参见 13.1.5)将不可用。
当机器人 TCP 处于 自由驱动模式时(请参阅 13.1.5),其当前位置接近安全板,或
者机器人的方向与理想的方向之间的偏差接近某一指定的最大偏离值,那么随着
TCP 越来越接近该极限,用户会感受到一股不断增加的排斥力。这股力量在 TCP
位于安全板大约 5 厘米时产生,或者在工具方向的偏离值与指定的最大偏离值相差
大约 3
◦
时产生。
当一个平面被定义为触发器缩减模式平面,并且 TCP 超出此边界,安全系统将转
换为缩减模式,并应用缩减模式的安全设置。触发板与一般的安全板所遵循的规则
是相同的,只不过一般的安全板允许机器人手臂超出板子。
10.12.1 选择一个边界进行配置
安全边界控件位于选项卡左边,它是用来选择一个边界限制进行配置的。
按下控件中列出的 8 个条目之一就可对安全板进行设置。如果所选的安全平面已进
行配置,此平面相应的 3D 展示将在此面板右侧的 3D 视图(请参阅 10.12.2)中突
出显示。可在选项卡底部安全板属性这一部分对安全板进行设置(请参阅 10.12.3)。
CB3 II-10 版本 3.3.0..
版权所有 © 2009–2016 Universal Robots A/S. 保留所有权利。

剩余102页未读,继续阅读
2021-04-30 上传
2023-05-05 上传
2023-09-22 上传
2023-07-04 上传
2023-05-20 上传
2023-05-03 上传
2018-12-18 上传

马少爷
- 粉丝: 5w+
- 资源: 23
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
