基于SCARA机器人的服务机械手臂关节结构设计
版权申诉
88 浏览量
更新于2024-06-23
收藏 816KB DOC 举报
"服务机器人手臂关节结构设计"
机械手是一门涉及计算机科学、机械学、电子学、自动控制、人工智能等多个方面的学科,它代表了机电一体化的最高成就。现今,机械手已经运用到各个领域,特别是在装配作业方面。在装配机械手中,平面关节型装配机械手(即SCARA型)是应用最广泛的一种装配机械手。
服务机器人的设计是机械手的重要组成部分,本文设计的是一种小型服务装配机械手,主要对这种机械手进行结构方面的设计。本文设计的SCARA机器人具有以下特点:通用性好、体积小、重量轻、外形美观、成本低,对其本体的可行方案进行了充分的研究后,设计成具有多个自由度的结构,由机身、大臂、小臂及手腕组成,谐波减速器、齿轮、丝杠螺母等组成了机械手简单可靠的传动方案。
关键词:工业机械手、自由度、机器人
在服务机器人的设计中,自由度是非常重要的概念。自由度是指机械手在执行任务时,能够实现的运动范围和方式的总和。在SCARA机器人中,自由度是由机身、大臂、小臂及手腕等组成的,每个关节都具有一定的运动范围,从而实现机械手的多样化运动。
在设计服务机器人的时候,需要考虑到机械手的可靠性、经济性和实用性等方面。为了提高机械手的可靠性,可以使用谐波减速器、齿轮、丝杠螺母等传动方案,从而减少机械手的磨损和故障。同时,为了提高机械手的经济性,可以使用小型化、轻量化的设计,减少机械手的成本。
在服务机器人的设计中,还需要考虑到人机交互的方面。人机交互是指机械手与人类之间的交互,包括机械手的控制、监控和反馈等方面。在设计服务机器人时,需要考虑到人机交互的舒适度、可靠性和实用性等方面,从而提高机械手的使用体验。
服务机器人的设计是一门复杂的学科,需要考虑到机械手的自由度、可靠性、经济性、人机交互等多方面的因素。通过对服务机器人的设计和研究,可以提高机械手的性能和实用性,提高人类生活和工作的效率和质量。
在服务机器人的应用中,装配作业是非常重要的一方面。装配作业是指机械手在生产过程中的应用,包括装配电子元器件、机器人等。在装配作业中,机械手需要具有高精度、高灵敏度和高可靠性的特点,从而提高生产效率和质量。
在服务机器人的应用中,还需要考虑到安全性和可靠性等方面。安全性是指机械手在执行任务时,能够避免危险和故障的可能性。可靠性是指机械手在执行任务时,能够保持稳定和可靠的性能。在设计服务机器人时,需要考虑到安全性和可靠性的方面,从而提高机械手的使用体验和生产效率。
服务机器人的设计和应用是非常复杂和重要的领域,需要考虑到机械手的自由度、可靠性、经济性、人机交互、安全性等多方面的因素。通过对服务机器人的设计和研究,可以提高机械手的性能和实用性,提高人类生活和工作的效率和质量。
第 2 章 总体方案设计
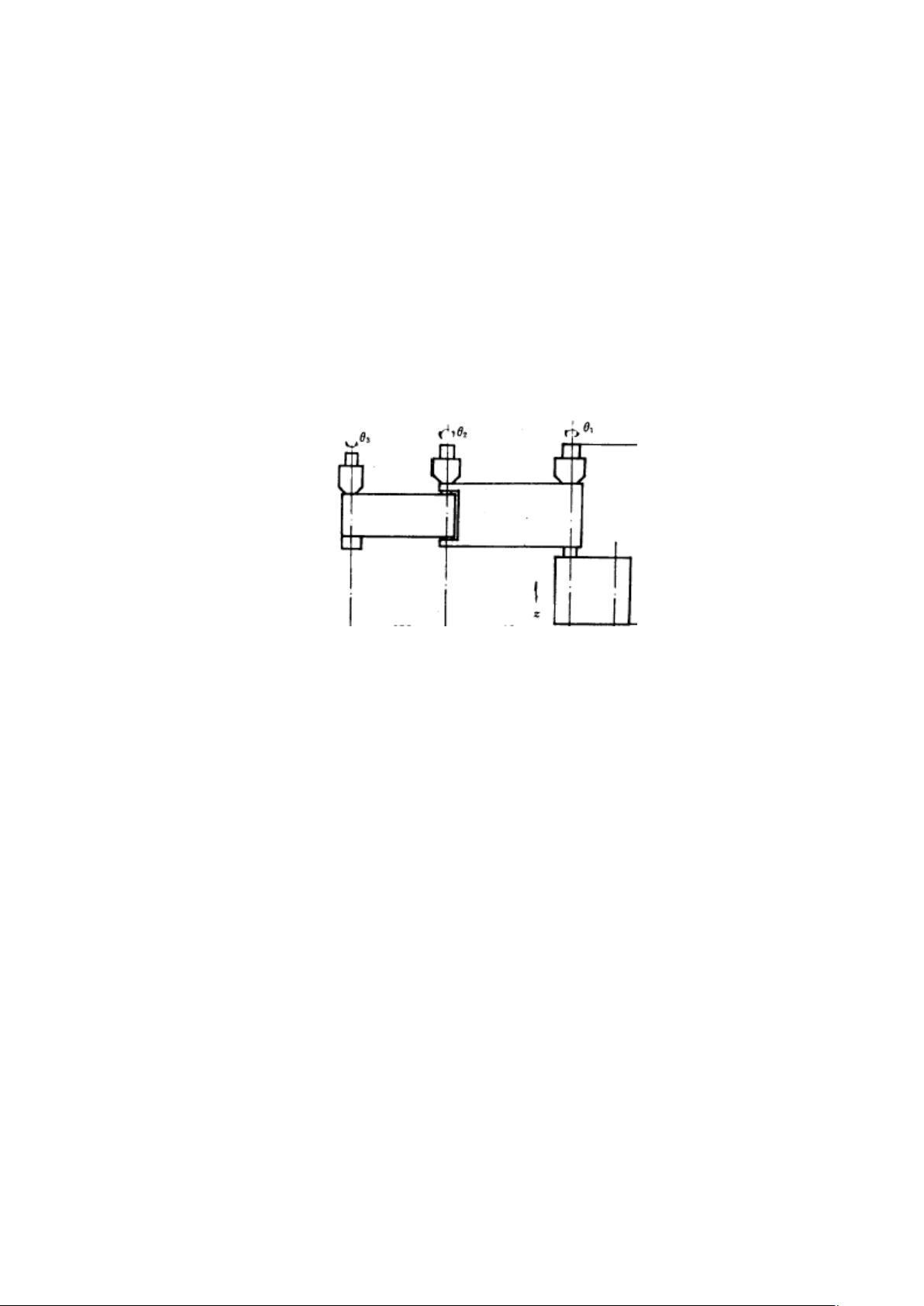
本设计课题要求机械手完成水平面内搬运运动,这包括 XY 平面运动,以及
Z 向上下运动。为了完成装配作业,还要求手腕具有一定柔顺性。这样一来如果
全部运动都设计成由机械手本体来完成,那么必然增加机械手本体复杂性,并会
影响机械手位置精度。另一方面,这种机械手通用性差,成本也高
[3]
。
鉴于上述原因,同时考虑机械手应具有良好的通用性,以保证这个课题完成
后,所提供机械手技术,具有较好的产业化、商品化前景。所以,在设计中,本
人把机械手设计成平面关节式机械手,具有四个自由度:两个完成水平面内回转
运动,一个完成 Z 轴上下运动,另一个完成绕 Z 轴旋转运动。
图 2-1 机械手结构示意图
2.1 工业服务机器手的传动系统设计
2.1.1 机械手驱动系统的比较与选择
工业服务机械手的驱动可分为液压,气动和电动三种基本类型。
1.液压驱动
液压传动机械手有很大的抓取能力,抓取力可高达上百公斤,液压力可达
7Mpa,液压传动平稳,动作灵敏,但对密封性要求高,不宜在高或低温现场工
作,需配备一套液压系统。
液压驱动有以下特点:
(1)输出功率很大,压力范围为 50-140N/cm
2
(2)控制性能:利用液体的不可压缩性,控制精度较高,输出功率大,可
无级调速,反应灵敏,可实现连续轨迹控制。
(3)结构适当,执行机构可标准化、模拟化,易实现直接驱动。功率/质量
较大,体积小,结构紧凑,密封问题较大。
(4)液压系统可实现自我润滑,过载保护方便,使用寿命长。液压驱动需
配置液压系统,易产生泄漏而影响运动精度。系统易发热,出现故障后较
难找出原因。
剩余34页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-12 上传
2023-07-11 上传
2023-07-11 上传
2023-07-11 上传
2023-07-11 上传
2023-07-12 上传

omyligaga
- 粉丝: 93
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- TypeScript组件化应用实践挑战解析
- 微信小程序药店管理系统的设计与实现
- OB2PluginSample 插件开发:依赖项管理技巧
- 图像处理技术详解与实践应用
- IML++ v.1.2a:C++现代迭代方法库更新
- 开源软件实现手机GPRS连接Linux网络
- 雷达数据解析:CSV操作提取408 ARS目标物理信息
- myStudies:探索后端开发与TypeScript实践
- Matlab源代码实现DFT的cefine程序指南
- 基于用户协作过滤的推荐系统实践入门
- 童心党史系统微信小程序设计与开发
- Salesforce Markdown工作簿:掌握技术细节指南
- 高效库存管理系统的开发与应用
- Kafka与Zeebe集成新工具:Kafka-Connect-Zeebe介绍与实践
- LiteLoaderBDS:轻量级Bedrock服务器插件加载器
- Linux环境下aarch64架构ACPI表格处理工具
