
Apollo公开课丨控制在环仿真技术分享
在Apollo 5.0中,我们升级了Simulation,增加了Dynamic model, 使得控制可以入环仿真。
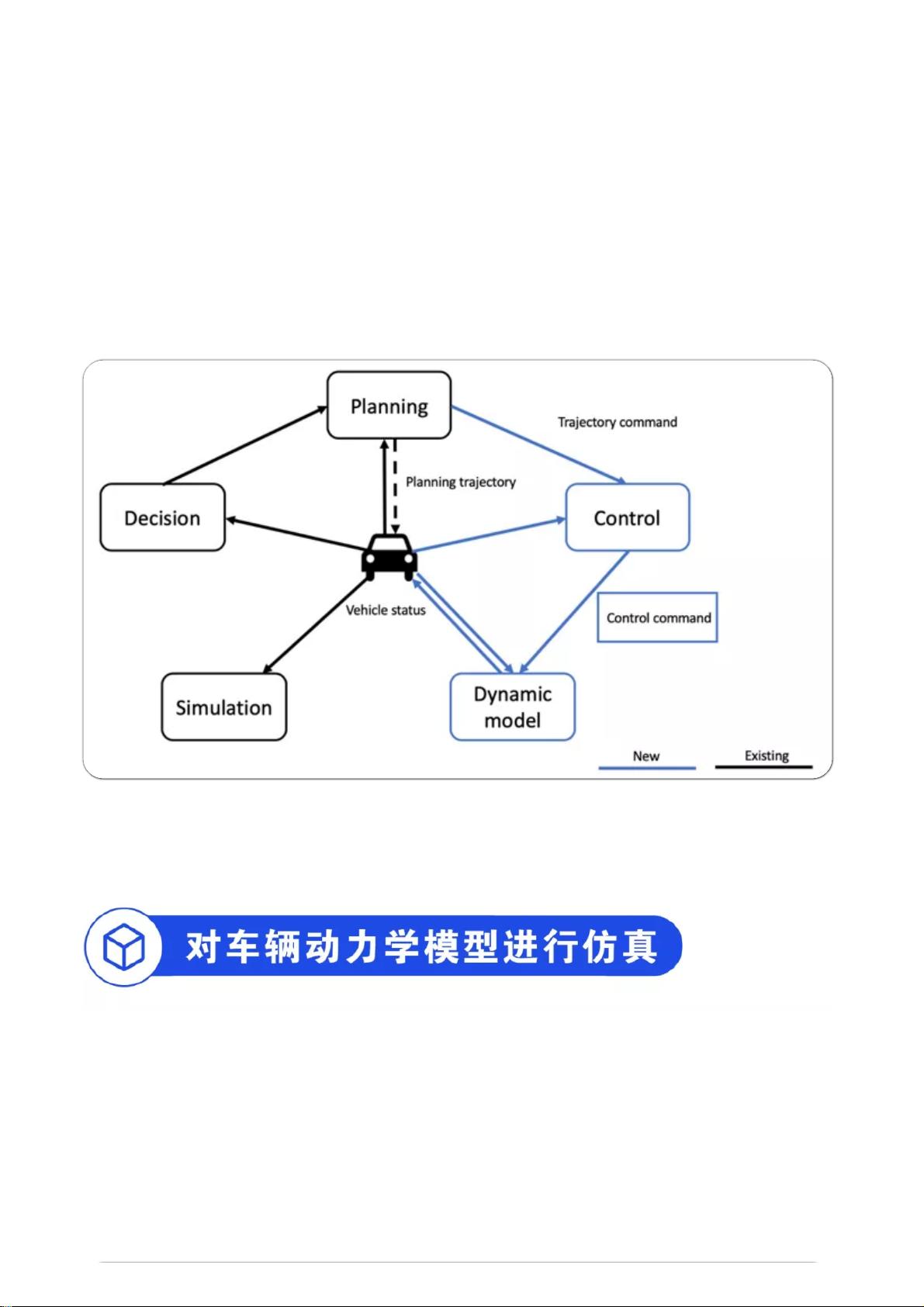
由原来的决策-运动规划-完美控制闭环,升级到现在的决策-运动规划-控制-动力学模型。为什么
要这么做呢?
首先,使得控制模块可以仿真入环,在开发和调试效率上可以得到很大的提升,进一步摆脱对上
车调试的依赖。那么,现在Baidu Apollo开放的控制在环仿真具备什么样的能力呢?
▲决策-运动规划-控制-动力学模型图
Apollo的动力学仿真是一个完全基于学习的模型,和传统车厂的开发模型相比,它具有模型精度
较好,开发成本较低,模型的灵活度和泛化程度相对较高的特点。后两者对于Apollo平台和生态
合作伙伴尤其重要。各种算法的对比如下图所示。
下载后可阅读完整内容,剩余6页未读,立即下载

疯狂的机器人
- 粉丝: 8877
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


