D3VO:深度学习驱动的单目视觉里程计
105 浏览量
更新于2024-06-20
收藏 1.61MB PDF 举报
"本文介绍了一种名为D3VO的新框架,该框架专注于单眼视觉里程计,结合深度、深度姿态和深度不确定性估计。D3VO使用深度网络进行自监督单目深度估计训练,并且能够在没有外部监督的情况下处理立体视频。通过对输入图像的光度不确定性建模,提升了深度估计的准确性,为直接视觉里程计提供了学习的权重函数。实验结果显示,D3VO网络在自监督深度估计任务上优于现有技术。在集成到直接视觉里程计中时,D3VO的前端跟踪和后端非线性优化均得到增强,表现出与最先进的单眼、立体和LiDAR里程计相当的性能。"
D3VO的主要贡献包括:
1. **自监督深度估计**:D3VO提出了一种新的方法,使用深度网络对立体视频进行自监督训练,无需额外的外部监督。通过调整图像对的光照条件,使它们匹配预测的亮度变换参数,从而训练网络进行单目深度估计。
2. **光度不确定性建模**:D3VO考虑了输入图像像素的光度不确定性,这种建模有助于提高深度估计的精度。它为直接视觉里程计的光度残差提供了学习权重函数,增强了系统的鲁棒性。
3. **深度、深度姿态和深度不确定性的紧密集成**:D3VO将预测的深度、姿态和不确定性整合到直接视觉里程计的前端跟踪和后端非线性优化中。这一集成解决了单目视觉里程计常见的尺度漂移问题,提高了系统性能。
4. **性能比较**:D3VO在KITTI里程计基准和EuRoCMAV数据集上的评估显示,其性能显著优于传统的单眼视觉里程计方法。同时,D3VO的表现与最先进的立体/LiDAR里程计和视觉惯性里程计相当,但只使用单一摄像头。
5. **应用领域**:深度学习的应用拓宽了计算机视觉的范围,但在SLAM和VO领域,基于几何的传统方法仍然占据主导地位。D3VO通过深度网络的引入,为单目视觉里程计带来了新的可能性,特别是在硬件成本和校准需求较低的情况下。
6. **挑战与未来工作**:尽管D3VO取得了显著的进步,但单目深度估计仍存在尺度漂移和鲁棒性问题。未来的研究可能需要继续探索如何进一步改进深度网络,以实现更准确、更稳定的单目视觉里程计系统,特别是在动态环境和复杂光照条件下。
1283
不
不
不
在不同的图像上,实际上可以明确地建模我们的方法预
测亮度对齐图像上的光度不确定性条件,这可以提供更
好的光度不确定性估计。此外,我们还寻求更好地利用
我们学习到的不确定性,并提议将其纳入传统的VO系
统[16]。
VO / SLAM的深度学习 已经探索了端到端学习的深
度神经网络,以直接预测具有监督[70,75,85]或无监
督学习[46,73,82,86]的图像之间的相对姿态。 除了
pose
在估计中,CodeSLAM [2]通过与相机姿势一起联合优
化密集几何体的学习先验来提供密集重建。然而,在姿
态估计精度方面,所有这些端到端方法都不优于经典的
基于立体或视觉惯性的VO方法。在深度单目深度估计
成功的基础上,一些工作将预测的深度/视差图集成到
单目VO系统中[68,78],以提高性能并消除尺度漂移。
CNN-SLAM [68]将有监督的深度神经网络预测的深度融
合到LSD-SLAM [17]中,并使用贝叶斯过滤来细化深度
图,从而在室内环境中实现卓越的性能[29,64]。其他
作品[10,67]探索了深度神经网络在基于特征的方法上
的应用,[34]使用生成对抗网络(GAN)作为图像增强
方法来提高VO在弱光下的鲁棒性。与我们最相关的工
作是深度虚拟立体测距(DVSO)。DVSO提出了一个
虚拟立体声项,它将半监督网络的深度估计引入到直接
VO管道中。特别是,DVSO在很大程度上优于其他单眼
VO系统,甚至达到了与最先进的立体视觉里程计系统
相当的性能[53,74]。虽然DVSO仅仅利用深度,但是
所提出的D3VO在多个级别上利用深度网络的能力,从
而将更多信息并入到D3VO中。
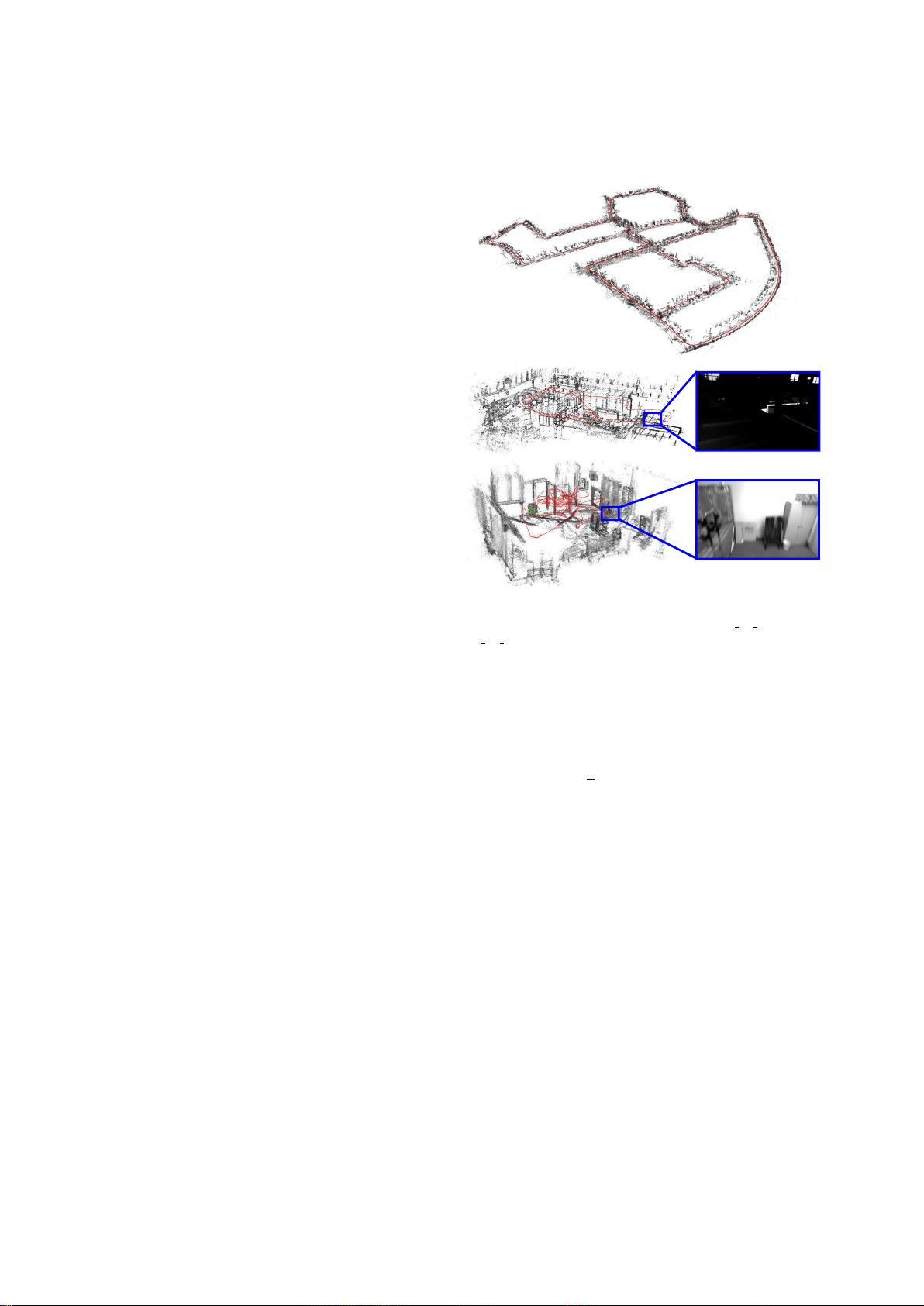
图
2
:
KITTI Odometry Seq
上
D3VO
提 供 的 点 云 和 轨 迹 示
例。
00
,
EuRoC
MH 05
困难
和
V1 03
困难
。
EuRoC
上的插图
显示了低照度和运动模糊的场景,这是导致传统纯视觉
VO
系统失败的主要原因之
它使用视频序列同时使用DepthNet学习深度和PoseNet学
习运动[26,86]。通过最小化时间立体图像和静态立体
图像之间的光度重投影误差的最小值来实现自监督训
练:
L
=
1
μ
min
r
(
I
,
I
′
)
。
(一)
直接VO管道。
自
我
|
V
|
�
系
p∈
V
不
t
→
t
3.
方法
我们首先介绍一种新的自我监督神经网络,它可以
预测深度,姿态和不确定性。该网络还估计
仿射亮度变
换参数
,以自监督的方式对齐训练图像的照明。基于每
个像素的可能亮度值[35,40]的分布预测光度不确定
性。此后,我们引入D3VO作为一个直接的视觉里程框
架,将预测的属性合并到跟踪前端和光度光束法平差后
端。
3.1.
自监督网络
所提出的单目深度估计网络的核心概念是自监督训
练方案
其中
V
是
I
t
上
的
所有像素的集合,并且
t
是所有源帧的
index在我们的设置中
,
I
t
是左图像,
I
t
是
左图 像 。
包含它的两
个相邻的时间帧和它的操作。
右(右)帧,即,
�
系我
�
�
∈
{
I
t
−
1
,
I
t
+1
,
I
t
s
}
。
在
Monodepth 2 [26]中提出了像素最小损失,以便处理不
同源帧之间的遮挡。
为了简化符号,我们在本节的其余部分使用
I
而不是
I
(p)
。
是通过
将时间立体图像与预测深度
D
进行
比
较而合成的
I
t
�
摄像机姿态T
t
、摄像机本征函数
K
和dif-
可参考的双线性采样器[32]。 注意,对于
I
t
s
→
t
,变换
T
t
s
是已知的且恒定的。DepthNet还通过馈送来预测右
图像
I
t
s
的深度图
D
t
s
如[27]中所提出的,仅对左图像
I
t
进行处理
训练
D
t
s
需要
综合
I
t
→
t
s
并与
I
t
s
进行比较
。
为了简单起见,我们将在下面
只详细说明损失
剩余14页未读,继续阅读
2019-03-20 上传
2021-04-22 上传
2023-11-11 上传
2023-09-19 上传
2023-09-18 上传
2023-08-25 上传
2024-03-20 上传
2023-04-01 上传









