
(完整 word 版)模糊控制在倒立摆中的 MATLAB 仿真应用
1.3 倒立摆系统状态方程
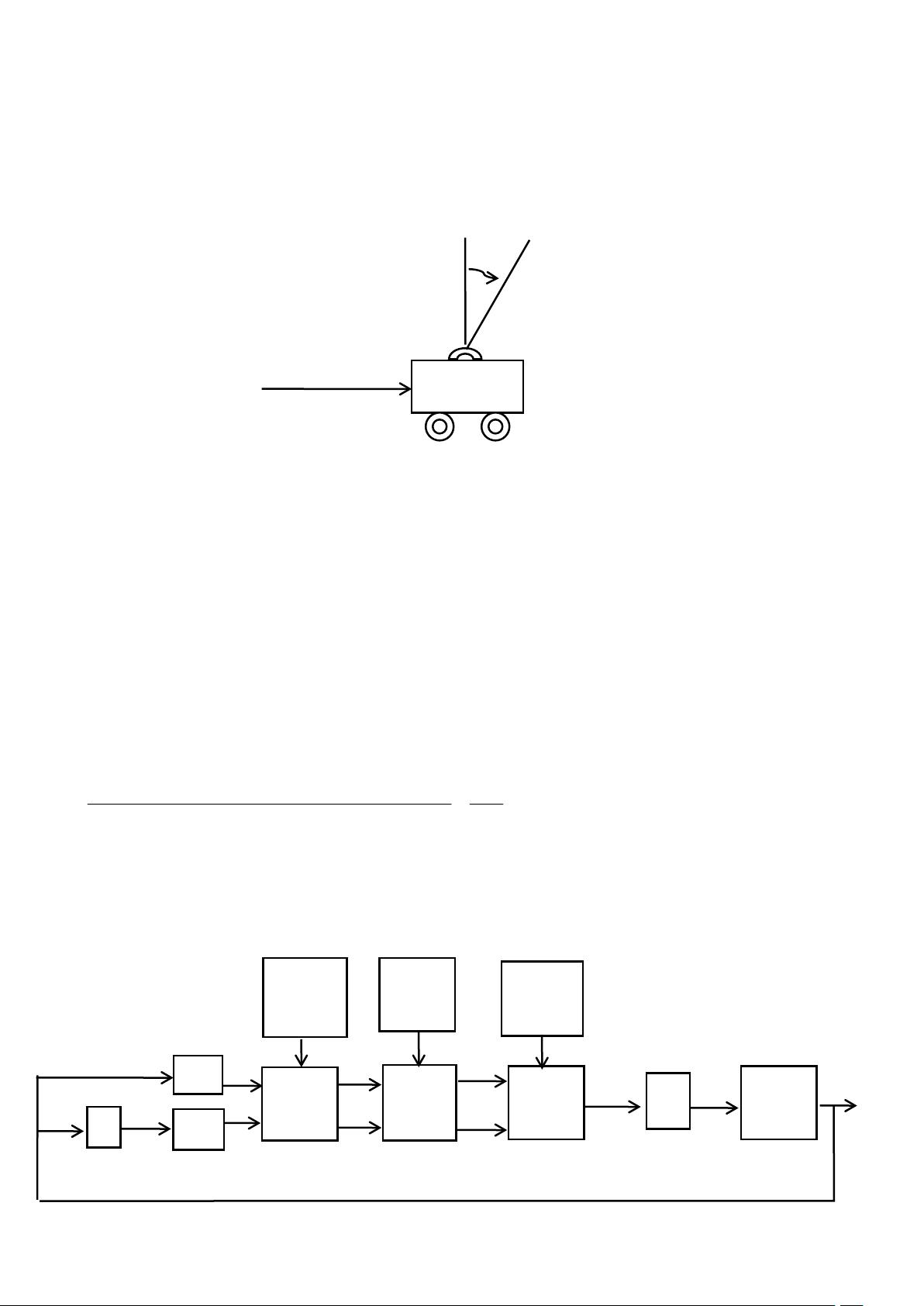
图 1-3 单级倒立摆模型图
θ 为杆与垂线的夹角,f 为作用力,杆的质量 m=0.1kg,杆和小车的总重量 m=1.1kg,半杆长 l=0.5m,
重力加速度 g=9.8m/
s
2
,采样周期 T=0.02s.倒立摆的数学模型为:
��
�����
�
180
cos)3/4(
]sin)180/([cossin
2
2
�
�
��
�
�
�
lmml
lmfmg
p
p
(式 1.1)
我们可以实时量测角度 θ,并计算出角速度,控制的任务是产生合适的作用力 f,以使倒立摆保持直立
状态。采用 C-FC 的控制系统如图 1-4
θ
f
1
K
2
K
S
模糊化
模糊推
理
输入的隶
属函数
控制规
则集
解模糊
输出的隶
属函数
倒立摆
3
K
剩余17页未读,继续阅读















