MATLAB中机器臂速度关系与视觉控制基础算法详解
需积分: 10 19 浏览量
更新于2024-07-19
收藏 2.3MB PDF 举报
在"Robotics: Vision and Control - Fundamental Algorithms in MATLAB英文版"的第8章,着重讨论了机械臂中的关键概念,特别是关节速度与末端执行器速度之间的关系。这一章节深入探讨了空间速度及其6维向量表示,以及这些在机器人学中的作用。
首先,该章通过数值方法介绍操纵器雅可比矩阵(Manipulator Jacobian),这是基于机械臂的姿态函数,它将关节速度映射到末端执行器的速度。雅可比矩阵在理解机械臂的灵活性(dexterity)方面至关重要,因为它揭示了机械臂在不同方向上的运动能力,包括哪些是容易操作的(柔顺性),哪些是受限的(刚性)。通过分析雅可比矩阵的数值特性,机械臂的运动范围和潜在的奇异配置(如关节完全锁定或反向驱动时的不稳定状态)得以理解。
接着,在第8.1节的后续部分,作者引入了额外的雅可比矩阵变体,如坐标框架之间的速度变换矩阵,以及不同角速度表示之间的转换。这些技术对于设计多自由度机器人系统,如工业机器人、移动机器人和飞行器等,具有实际应用价值,尤其是在不依赖逆运动学的情况下规划末端执行器在笛卡尔空间的路径,这对于过度或不足驱动的机器人尤其有用。
在第8.2节中,通过计算雅可比矩阵的逆,作者展示了如何生成不需要求解逆运动学问题的直接路径规划。这种方法避免了在某些复杂机械结构中可能遇到的计算难题,使得路径规划更加高效和精确。
最后,第8.3节介绍了雅可比矩阵转置的应用,即如何将力从末端执行器转换为关节力。这在机器人控制系统的设计中至关重要,因为控制策略通常需要根据末端负载或环境力来调整关节力,而雅可比矩阵的这个特性简化了这种转换过程。
第8章的内容涵盖了基础的机器人学理论,如雅可比矩阵及其相关概念,是理解和应用机器人控制算法,特别是结合MATLAB工具箱进行实践操作的重要章节。无论是对于初学者还是经验丰富的工程师,这部分内容都提供了对机械臂运动学和控制深入理解的基础。
174
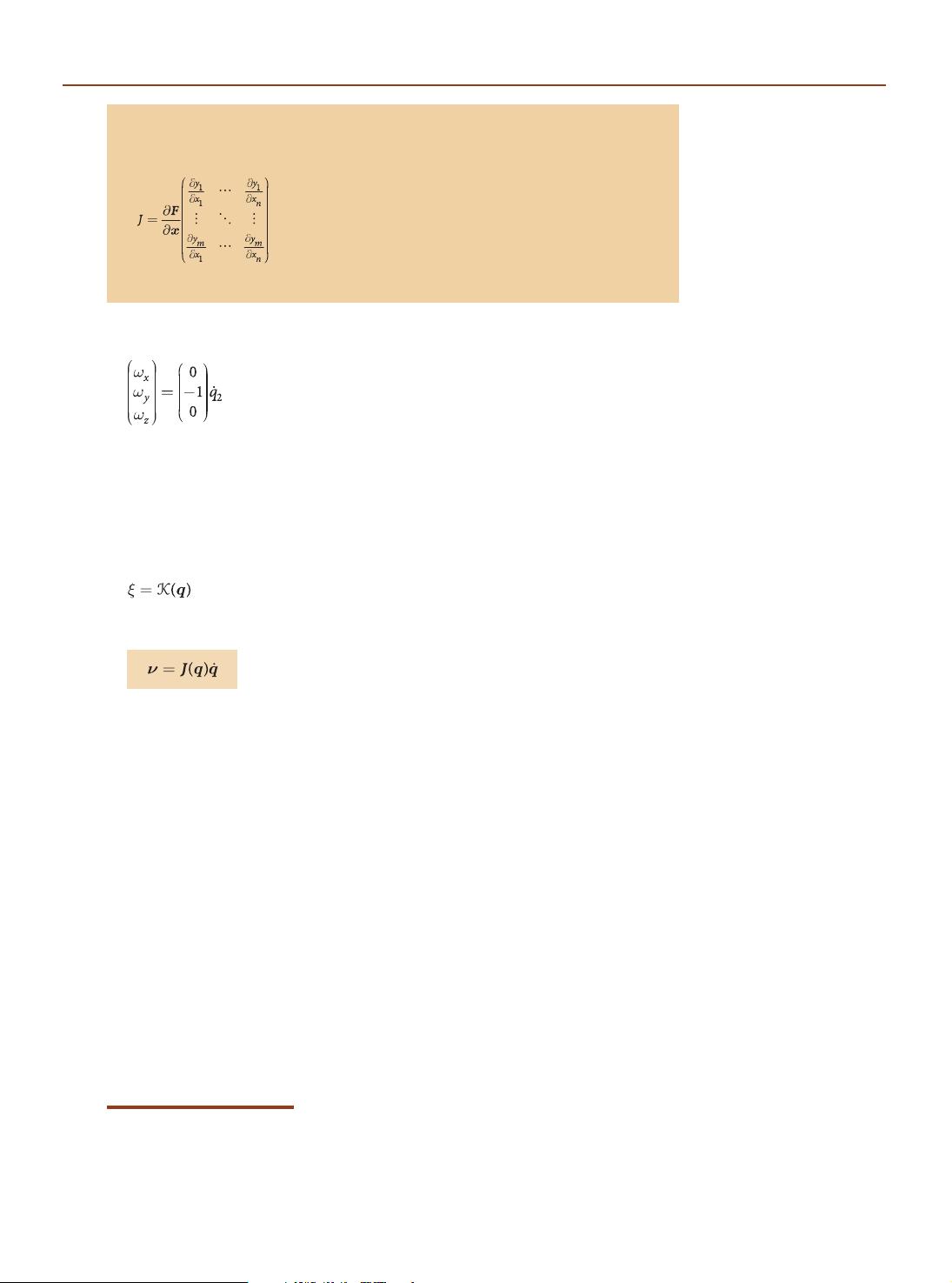
from which we write
Once again, with reference to Fig. 8.1, this makes sense. Rotation of joint two, whose
rotational axis is in the negative y-direction, results in an angular velocity in the nega-
tive y-direction.
We have established, numerically, the relationship between the velocity of individual
joints and the translational and angular velocity of the robot’s end-effector. Earlier
Eq. 7.3 we wrote the forward kinematics in functional form as
and taking the derivative we write
(8.2)
which is the instantaneous forward kinematics where
ν
= (v
x
, v
y
, v
z
, ω
x
, ω
y
, ω
z
) ∈ R
6
is
a spatial velocity and comprises translational and rotational velocity components. The
matrix J(q) ∈ R
6×N
is the manipulator Jacobian or the geometric Jacobian.
The Jacobian matrix can be computed directly
by the jacob0 method of the
SerialLink object
>> J = p560.jacob0(qn)
J =
0.1501 0.0144 0.3197 0 0 0
0.5963 0.0000 0.0000 0 0 0
0 0.5963 0.2910 0 0 0
0 -0.0000 -0.0000 0.7071 -0.0000 -0.0000
0 -1.0000 -1.0000 -0.0000 -1.0000 -0.0000
1.0000 0.0000 0.0000 -0.7071 0.0000 -1.0000
The rows correspond to Cartesian degrees of freedom and the columns correspond to
joints – they are the end-effector spatial velocities corresponding to unit velocity of
the corresponding joints. The results we computed earlier, using derivative approxi-
mation, can be seen in the first two columns. The 3 × 3 block of zeros in the top right
indicates that motion of the wrist joints has no effect on the end-effector translational
motion – this is an artifact of the spherical wrist and a zero length tool.
8.1.1
l
Transforming Velocities between Coordinate Frames
Consider two frames {A} and {B} related by
A Jacobian is the matrix equivalent of the derivative – the derivative of a vector-valued function of
a vector with respect to a vector. If y = F(x) and x ∈R
n
and y ∈ R
m
then the Jacobian is the
m × n matrix
The Jacobian is named after Carl Jacobi, and more more details are given in Appendix G.
The function jacob0 does not use
finite differences. It has a direct form
based on the Denavit-Hartenberg
parameters of the robot arm (Paul and
Shimano 1978).
Chapter 8
·
Velocity Relationships
剩余19页未读,继续阅读
439 浏览量
246 浏览量
116 浏览量
146 浏览量
224 浏览量
102 浏览量
128 浏览量
313 浏览量

qq_14903801
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Servlet核心技术与实践:从基础到高级
- Servlet核心技术详解:从基础到过滤器与监听器
- 操作系统实验:进程调度与优先数算法
- 《Div+CSS布局大全》教程整理
- 创建客户反馈表单的步骤
- Java容器深度解析:Array、List、Set与Map
- JAVA字符集与编码转换详解
- 华为硬件工程师的手册概览
- ASP.NET 2.0 实现动态广告管理与随机显示
- 使用Dreamweaver创建网页过渡动画效果
- 创建ASP登录系统:步骤详解
- ASP论坛搭建:资料转义与版主权限管理
- C#新手必读:新版设计模式详解与实例
- 提升网站论坛制作:技术优化与点击计数
- AVR微处理器ATmega32L/32:高级特性和功能详解
- C++实现经典矩阵:螺旋及蛇形排列
