




MATLAB中RAW图像处理教程:从传感器数据到可视输出
需积分: 9 94 浏览量
更新于2024-07-17
1
收藏 375KB PDF 举报
"Processing RAW Images in MATLAB" 是一份由 Rob Sumner 编写的教程,隶属于电气工程系,加州大学圣克鲁斯分校,发布于2014年5月19日。这份文档主要针对的是如何在MATLAB环境下处理数码相机所存储的未经加工的原始(RAW)图像数据。RAW照片文件包含了相机传感器获取的原始数据,尽管这些数据对于科学研究具有高度价值,但在显示之前通常需要进行预处理。
文档深入探讨了RAW图像传感器数据的本质,包括数据的量化和色彩校准,这是标准图像处理流程中的关键步骤。作者特别强调了理解这些原始数据与最终图像显示之间的关系对于研究工作的重要性,因为许多算法设计往往假设处理的是经过一定格式转换后的图像,如8位灰度图像或包含3个通道、每个通道8位的RGB图像。
在教程中,Sumner教授提供了如何将RAW图像数据导入MATLAB的方法,并详细介绍了实现可见输出的标准工作流程。这包括但不限于图像读取的编程技巧,数据解析,以及如何应用各种预处理技术,如去噪、白平衡调整、色阶转换等,以便将原始数据转化为适合人类视觉的图像。
此外,他还可能讨论了RAW数据的优势,如保留更多的细节和动态范围,以及如何通过MATLAB工具箱,如Image Processing Toolbox或者Computer Vision Toolbox,来操作和分析这些数据。通过这个教程,读者不仅能学习到处理RAW图像的具体步骤,还能了解到如何将其理论知识应用于实际的图像处理项目中。
"Processing RAW Images in MATLAB"是一份实用且深入的指南,对于那些在图像处理和计算机视觉领域工作,希望了解并利用MATLAB处理RAW图像数据的科研人员和开发者来说,具有很高的参考价值。
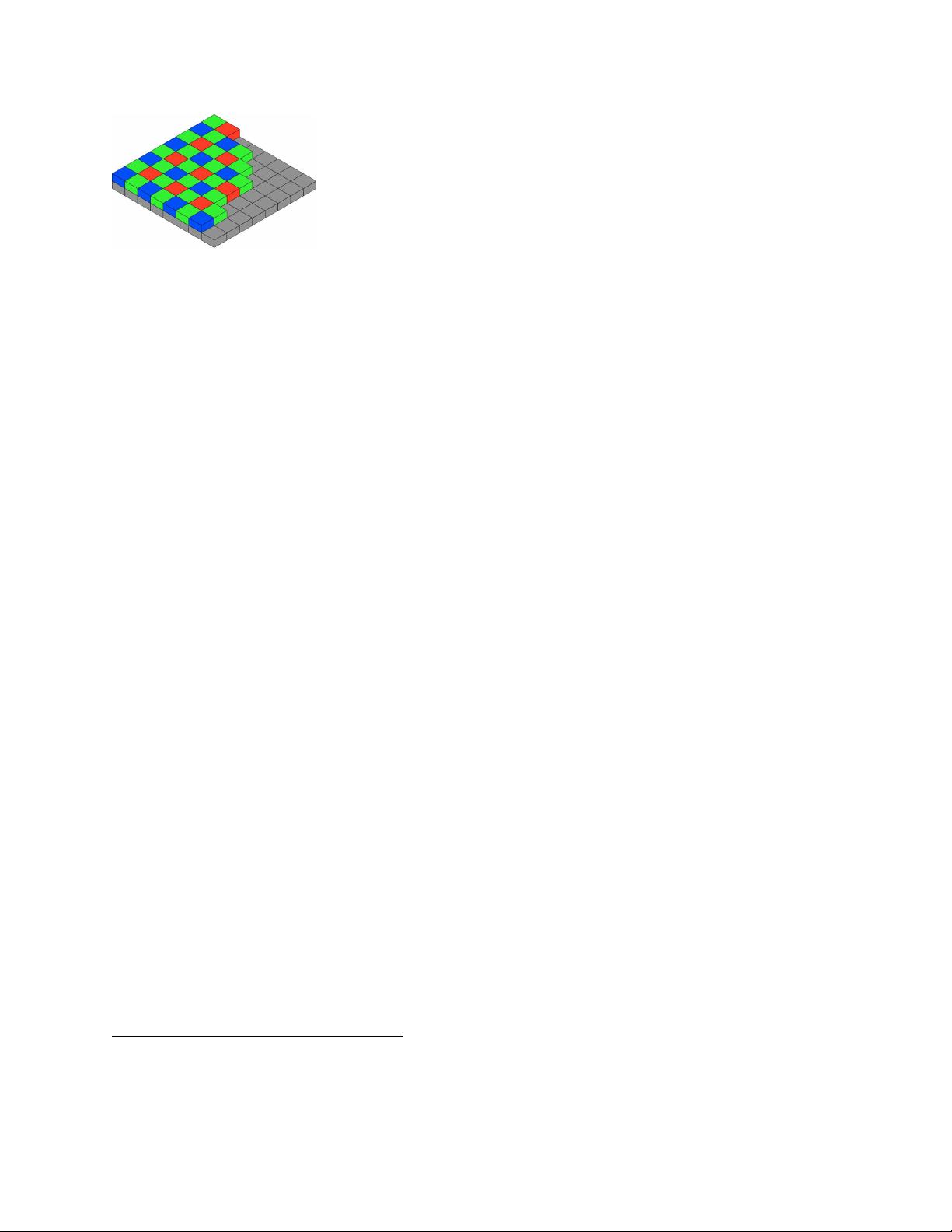
Figure 2: Bayer CFA layout.
Each pixel repr e sents either
the red, blue, or green value
of the light incident at the
sensor, depending on arrange-
ment in the array. To get
all three elements at every lo-
cation, demosaicing must be
applied.
Color Channel Scaling
An unfortunate reali ty of color imaging is that there is no truth
in color. Generally, one cannot look at a color image and
know that it faithfully re pr es ents the color of the subject in ques-
tion at the time the image was taken. As a severe simplifica-
tion, one can think of an illuminating light as having an intrin-
sic color and the object it falls upon also having its own color.
These interact, and the light which the camera or eye receives, the
light reflected from the object, is an i ne xt r i cab l e combination of
the two.
What this leads to is that any object can look like any color, depending on
the light illuminating it. What we need is a reference point, something we
know should be a certain color (or more accurately, a certain chromatic-
ity), so that we can adjust the R, G, B values of th e pixel until i t is that
color. This compensates for th e color of the illuminating light and reveals
the “true” color of the object. Under the assumption that the same illu-
minant is lighting the entire scene, we can do the same balancing to every
pixel in the image. This is the process of white balancing. Essentially, we find a pixel we know should be
white (or gray), which we know should have RGB values all equal, and find the scaling factors necessary to
make them all equal.
Thus the problem reduces to simply finding two scalars which represent the relative scaling of two of the
color channels to the third. It is typical that the green channel is assumed to be the channel to which the
others are compared. These scalars also take into account the relative sensitivities of the different color
channels, e.g., the fact that the green filter of the CFA is much more transparent than the red or blue filters.
Thus, the green channel scalar is usually 1, while the othe rs are often > 1.
Camera Color Spaces
The number of dimens ion s of perceivable colors is three. This may seem obvious to those who are familiar
with this result (such as anyone who has ever heard that “any color can be made from a combination of
red, green, and blue light”), but the reduction from an infinite-dimensional sp ace to a three-dimensional one
is far from trivial. An almost-vector space may be construct e d for perceivable colors, leading to the use of
many familiar linear algebra operations
1
on what we refer to as “the color space”. The ‘almost-’ qualifier is
necessary b e cau se one cannot subtract color since there is no such thing as negative light (yet). Fortunately,
this st i ll leaves us with a convex cone of color which is quite amenable to linear algebra.
In t h e language of linear algeb ra, we repr es ent the color of a pixel with three coordin ate s (which we recognize
as the R, G, and B values associated with the pixel). Importantly, these are the p i x el ’ s color coordinates with
res pect to a particular basis. What is often not evident is that the basis generated by the physical sensors
of the digital camera is not the same as those of most displays. A full discuss ion of this topic is beyond the
scope of this document, but we will state simply that we presume the displayable output space to be that
defined as a common standard, sRGB[
10].
Thus, though we obtain a familiar RGB image after white balancing and demosaicing a CFA, its colors are
not those which t he com pu t er mon i t or ex pects. To correct for this, we must apply a linear transformation
(i.e., an app rop r iat e change of basis matrix) to the RGB-vector of each pixel in the image. It is descri bed
later how this matrix can b e found.
1
In fact, the man who essentially invented linear algebra, Hermann Grassman, was also noted for exploring the laws p er tain ing
to the perceptual equivalence of the color of various light sources. Treating colors as vectors is historically tied into the origins
of vector spaces themselves!
3
下载后可阅读完整内容,剩余14页未读,立即下载
963 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
depth Study of Neural Networks: Deep Belief Networks and Adaptive Learning Rate Techniques in MATLAB
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情


中国的孩子
- 粉丝: 13
 我的内容管理
展开
我的内容管理
展开








最新资源
- 实现ViewPager+Fragment仿微信底部TAG渐变效果
- C语言在Windows下的日期时间操作类实现
- VC语言获取系统进程列表的实现方法
- Android开发指南:eoe特刊23期详解
- 打造仿QQ聊天界面:带横向滑动删除的表情功能
- 在线编辑JSON格式的利器:JSONedit使用体验
- 深入浅出面向对象程序设计的C#实战指南
- SQL SERVER基础操作:增删改查及视图和存储过程
- 探索74LS74系列:数字逻辑集成器件核心解析
- 批量图片下载器PictureDown的C#源码解析与实现
- 网上订餐系统源码与论文资源 - JSP/Struts/Hibernate
- 实现QQ风格下拉菜单的MFC ComBox控件
- CHAN - 深度解析JavaScript项目
- Java实现带进度条文件上传功能详解
- 开源网店系统NopCommerce 2008版本发布
- 图标合集压缩包 - icon图标资源大全






















