[Advanced] Signal Detection and Estimation in MATLAB: Implementing the Kalman Filter
发布时间: 2024-09-14 06:19:51 阅读量: 40 订阅数: 85 
# 2.1 State Space Models and Kalman Filter Algorithm
### 2.1.1 Establishment of the State Space Model
The state space model is a mathematical model that describes the relationship between the state and the observation values of a dynamic system. In Kalman filtering, the state space model consists of two equations:
```
x[k+1] = F[k] * x[k] + B[k] * u[k] + w[k] # State equation
y[k] = H[k] * x[k] + v[k] # Observation equation
```
Where:
- `x[k]`: The state vector of the system at time `k`
- `u[k]`: The control input of the system at time `k`
- `y[k]`: The observation of the system at time `k`
- `F[k]`: The state transition matrix
- `B[k]`: The control input matrix
- `H[k]`: The observation matrix
- `w[k]`: The state noise, which follows a Gaussian distribution with mean 0 and covariance matrix `Q[k]`
- `v[k]`: The observation noise, which follows a Gaussian distribution with mean 0 and covariance matrix `R[k]`
# 2. Kalman Filter Theoretical Foundations
### 2.1 State Space Models and Kalman Filter Algorithm
#### 2.1.1 Establishment of the State Space Model
The state space model is a mathematical model that describes dynamic systems, consisting of a state equation and an observation equation. The state equation describes the change of the system state over time, while the observation equation describes the relationship between the system output and the state.
The general form of the state equation is:
```
x[k+1] = A[k]x[k] + B[k]u[k] + w[k]
```
Where:
* x[k] is the state vector of the system at time k
* A[k] is the state transition matrix
* B[k] is the control input matrix
* u[k] is the control input vector
* w[k] is the process noise vector
The general form of the observation equation is:
```
y[k] = C[k]x[k] + v[k]
```
Where:
* y[k] is the observation vector of the system at time k
* C[k] is the observation matrix
* v[k] is the measurement noise vector
#### 2.1.2 Derivation of the Kalman Filter Algorithm
The Kalman filter algorithm is a recursive algorithm that estimates the system state by utilizing the state space model and observation data. The derivation of the algorithm is as follows:
**Prediction step:**
```
x[k|k-1] = A[k-1]x[k-1|k-1] + B[k-1]u[k-1]
P[k|k-1] = A[k-1]P[k-1|k-1]A[k-1]^T + Q[k-1]
```
Where:
* x[k|k-1] is the state prediction value at time k
* P[k|k-1] is the state covariance prediction value at time k
* Q[k-1] is the process noise covariance matrix
**Update step:**
```
K[k] = P[k|k-1]C[k]^T(C[k]P[k|k-1]C[k]^T + R[k])^-1
x[k|k] = x[k|k-1] + K[k](y[k] - C[k]x[k|k-1])
P[k|k] = (I - K[k]C[k])P[k|k-1]
```
Where:
* K[k] is the Kalman gain
* R[k] is the measurement noise covariance matrix
* I is the identity matrix
### 2.2 Implementation and Optimization of the Kalman Filter
#### 2.2.1 MATLAB Implementation of the Kalman Filter
MATLAB provides the `kalman` function to implement the Kalman filter algorithm. The syntax of the function is as follows:
```
[xhat, P, K] = kalman(y, A, C, Q, R, x0, P0)
```
Where:
* y is the observation data
* A is the state transition matrix
* C is the observation matrix
* Q is the process noise covariance matrix
* R is the measurement noise covariance matrix
* x0 is the initial state
* P0 is the initial state covariance
#### 2.2.2 Convergence and Robustness Analysis of the Kalman Filter
The convergence of the Kalman filter can be judged by checking the eigenvalues of the state covariance matrix P. If all eigenvalues are less than 1, the filter converges.
The robustness of the Kalman filter can be judged by checking the condition number of the Kalman gain K. If the condition number is large, the filter is sensitive to noise and modeling errors.
To improve the robustness of the Kalman filter, the following methods can be applied:
* Use robust estimators to estimate the process noise and measurement noise covariance matrices
* Use adaptive filters to adjust the state transition matrix and the observation matrix
* Use multi-sensor fusion to enhance the reliability of the observation data
# 3.1 Filtering and Denoising of Noisy Signals
#### 3.1.1 Application of the Kalman Filter in Noise Filtering
The application of the Kalman filter in noise filtering is mainly reflected in the filtering of noise in the measurement signal, thus obtaining a purer signal. The basic principle is to use the Kalman filter algorithm to estimate the state of the measurement signal, and to continuously correct the estimated value through prediction a

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
扇形菜单设计原理

# 摘要
扇形菜单作为一种创新的界面设计,通过特定的布局和交互方式,提升了用户在不同平台上的导航效率和体验。本文系统地探讨了扇形菜单的设计原理、理论基础以及实际的设计技巧,涵盖了菜单的定义、设计理念、设计要素以及理论应用。通过分析不同应用案例,如移动应用、网页设计和桌面软件,本文展示了扇形菜单设计的实际效果,并对设计过程中的常见问题提出了改进策略。最后,文章展望了扇形菜单设计的未来趋势,包括新技术的应用和设计理念的创新。
# 关键字
扇形菜
传感器在自动化控制系统中的应用:选对一个,提升整个系统性能
# 摘要
传感器在自动化控制系统中发挥着至关重要的作用,作为数据获取的核心部件,其选型和集成直接影响系统的性能和可靠性。本文首先介绍了传感器的基本分类、工作原理及其在自动化控制系统中的作用。随后,深入探讨了传感器的性能参数和数据接口标准,为传感器在控制系统中的正确集成提供了理论基础。在此基础上,本文进一步分析了传感器在工业生产线、环境监测和交通运输等特定场景中的应用实践,以及如何进行
CORDIC算法并行化:Xilinx FPGA数字信号处理速度倍增秘籍

# 摘要
本文综述了CORDIC算法的并行化过程及其在FPGA平台上的实现。首先介绍了CORDIC算法的理论基础和并行计算的相关知识,然后详细探讨了Xilinx FPGA平台的特点及其对CORDIC算法硬件优化的支持。在此基础上,文章具体阐述了CORDIC算法
C++ Builder调试秘技:提升开发效率的十项关键技巧
# 摘要
本文详细介绍了C++ Builder中的调试技术,涵盖了从基础知识到高级应用的广泛领域。文章首先探讨了高效调试的准备工作和过程中的技巧,如断点设置、动态调试和内存泄漏检测。随后,重点讨论了C++ Builder调试工具的高级应用,包括集成开发环境(IDE)的使用、自定义调试器及第三方工具的集成。文章还通过具体案例分析了复杂bug的调试、
MBI5253.pdf高级特性:优化技巧与实战演练的终极指南
# 摘要
MBI5253.pdf作为研究对象,本文首先概述了其高级特性,接着深入探讨了其理论基础和技术原理,包括核心技术的工作机制、优势及应用环境,文件格式与编码原理。进一步地,本文对MBI5253.pdf的三个核心高级特性进行了详细分析:高效的数据处理、增强的安全机制,以及跨平台兼容性,重点阐述了各种优化技巧和实施策略。通过实战演练案
【Delphi开发者必修课】:掌握ListView百分比进度条的10大实现技巧

# 摘要
本文详细介绍了ListView百分比进度条的实现与应用。首先概述了ListView进度条的基本概念,接着深入探讨了其理论基础和技术细节,包括控件结构、数学模型、同步更新机制以及如何通过编程实现动态更新。第三章
先锋SC-LX59家庭影院系统入门指南
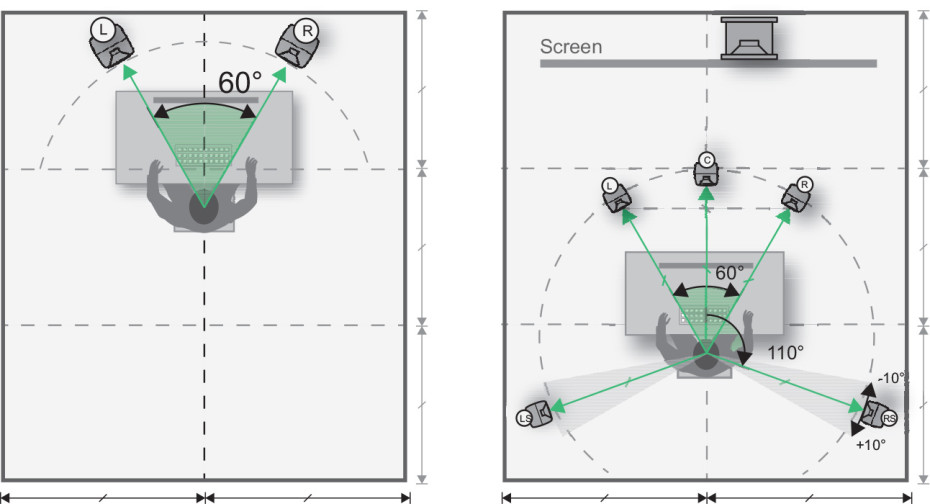
# 摘要
本文全面介绍了先锋SC-LX59家庭影院系统,从基础设置与连接到高级功能解析,再到操作、维护及升级扩展。系统概述章节为读者提供了整体架构的认识,详细阐述了家庭影院各组件的功能与兼容性,以及初始设置中的硬件连接方法。在高级功能解析部分,重点介绍了高清音频格式和解码器的区别应用,以及个
【PID控制器终极指南】:揭秘比例-积分-微分控制的10个核心要点

# 摘要
PID控制器作为工业自动化领域中不可或缺的控制工具,具有结构简单、可靠性高的特点,并广泛应用于各种控制系统。本文从PID控制器的概念、作用、历史发展讲起,详细介绍了比例(P)、积分(I)和微分(D)控制的理论基础与应用,并探讨了PID
【内存技术大揭秘】:JESD209-5B对现代计算的革命性影响
# 摘要
本文详细探讨了JESD209-5B标准的概述、内存技术的演进、其在不同领域的应用,以及实现该标准所面临的挑战和解决方案。通过分析内存技术的历史发展,本文阐述了JESD209-5B提出的背景和核心特性,包括数据传输速率的提升、能效比和成本效益的优化以及接口和封装的创新。文中还探讨了JESD209-5B在消费电子、数据中心、云计算和AI加速等领域的实
【install4j资源管理精要】:优化安装包资源占用的黄金法则

# 摘要
install4j是一款强大的多平台安装打包工具,其资源管理能力对于创建高效和兼容性良好的安装程序至关重要。本文详细解析了install4j安装包的结构,并探讨了压缩、依赖管理以及优化技术。通过对安装包结构的深入理解,本文提供了一系列资源文件优化的实践策略,包括压缩与转码、动态加载及自定义资源处理流程。同时
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )