【Practical Exercise】Radar Signal Processing with MATLAB
发布时间: 2024-09-14 06:50:32 阅读量: 33 订阅数: 65 
# 1. Basic Concepts of Radar Signal Processing
Radar (Radio Detection and Ranging) is a system that uses electromagnetic waves to detect, locate, and track targets. Radar signal processing is a crucial component of radar systems, primarily tasked with extracting and analyzing target information from radar echo signals to achieve target detection, parameter estimation, and classification.
Radar signal processing involves multiple technical domains, including signal processing, statistics, optimization theory, and machine learning. The performance of radar signal processing algorithms directly affects the overall performance of radar systems. Therefore, a thorough understanding of the foundational knowledge of radar signal processing is essential for designing and implementing high-performance radar systems.
# 2. MATLAB Radar Signal Processing Toolbox
### 2.1 Introduction to the Radar Signal Processing Toolbox
The MATLAB radar signal processing toolbox is a suite specifically designed for radar signal processing applications. It offers a variety of functions covering all aspects of radar signal processing, including:
- Signal preprocessing
- Feature extraction
- Target detection and parameter estimation
- Signal classification
The advantage of this toolbox lies in its ease of use and efficiency. It provides an intuitive user interface and comprehensive documentation, enabling engineers to quickly become proficient and efficiently process radar signals.
### 2.2 Common Radar Signal Processing Functions
The MATLAB radar signal processing toolbox includes many useful functions for performing common radar signal processing tasks. Some of the frequently used functions include:
- **phased.RangeDopplerEstimator**: Used to perform pulse Doppler processing to detect and estimate the range and velocity of targets.
- **phased.MatchedFilter**: Used to perform matched filtering to enhance target signals and suppress noise.
- **phased.ConstantFalseAlarmRateDetector**: Used to perform constant false alarm rate detection to detect targets in radar signals.
- **phased.AngleEstimator**: Used to estimate the azimuth or elevation of targets.
These functions offer powerful capabilities, allowing engineers to easily perform complex radar signal processing tasks.
#### Code Block Example:
```
% Import the radar signal processing toolbox
import phased.radarSignalProcessing.*;
% Create a pulse Doppler processor
rangeDopplerEstimator = phased.RangeDopplerEstimator('RangeResolution', 10, 'DopplerResolution', 1);
% Create a matched filter
matchedFilter = phased.MatchedFilter('FilterCoefficients', matchedFilterCoefficients);
% Create a constant false alarm rate detector
constantFalseAlarmRateDetector = phased.ConstantFalseAlarmRateDetector('Threshold', 0.01);
% Create an angle estimator
angleEstimator = phased.AngleEstimator('SensorArray', phased.ULA('NumElements', 8, 'ElementSpacing', 0.5));
% ...
% Process radar signals using these functions
```
#### Code Logic Analysis:
- `import phased.radarSignalProcessing.*` - Imports the radar signal processing toolbox.
- `rangeDopplerEstimator = phased.RangeDopplerEstimator(...)` - Creates a pulse Doppler processor and sets its range resolution and Doppler resolution.
- `matchedFilter = phased.MatchedFilter(...)` - Creates a matched filter and sets its filter coefficients.
- `constantFalseAlarmRateDetector = phased.ConstantFalseAlarmRateDetector(...)` - Creates a constant false alarm rate detector and sets its threshold.
- `angleEstimator = phased.AngleEstimator(...)` - Creates an angle estimator and sets its sensor array.
- `...` - Processes radar signals using these functions.
#### Parameter Explanation:
- `RangeResolution`: Range resolution of the pulse Doppler processor.
- `DopplerResolution`: Doppler resolution of the pulse Doppler processor.
- `FilterCoefficients`: Filter coefficients for the matched filter.
- `Threshold`: Threshold for the constant false alarm rate detector.
- `SensorArray`: Sensor array for the angle estimator.
# 3. Radar Signal Preprocessing
### 3.1 Noise Removal
Noise is a common interference factor in radar signal processing that can affect the quality and reliability of the signal. Noise removal is an important step in radar signal preprocessing, aimed at eliminating or reducing the impact of noise on the signal.
#### 3.1.1 Filter Design
A filter is a frequency selector that can selectively ***mon filters in radar signal processing include:
- **Low-pass filter**: Passes low-frequency signals and attenuates high-frequency signals.
- **High-pass filter**: Passes high-frequency signals and attenuates low-frequency signals.
- **Band-pass filter**: Passes signals within a specific frequency band and attenuates signals in other frequency bands.
- **Band-stop filter**: Attenuates signals within a specific frequency band and passes signals in other frequency bands.
Filter design needs to consider parameters such as the filter's cutoff frequency, passband gain, and stopband attenuation.
#### 3.1.2 Denoising Algorithms
In addition to filters, there are various denoising algorithms that can be used in radar signal processing, including:
- **Moving average filter**: Averages signals to eliminate random noise.
- **Median filter**: Applies median filtering to eliminate impulse noise.
- **Wiener filter**: An optimal linear filter that considers both the statistical characteristics of the signal and the noise.
- **Wavelet transform**: A time-frequency analysis method that decomposes signals into components of different frequencies and time scales, then selectively removes noise components.
### 3.2 Clutter Suppression
Clutter is another common interference factor in radar signal processing, referring to reflected signals from non-targets. Clutter suppression aims to eliminate or reduce the impact of clutter on the signal, improving the accuracy of target de

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【时间序列分析】:如何在金融数据中提取关键特征以提升预测准确性

# 1. 时间序列分析基础
在数据分析和金融预测中,时间序列分析是一种关键的工具。时间序列是按时间顺序排列的数据点,可以反映出某
【线性回归时间序列预测】:掌握步骤与技巧,预测未来不是梦
# 1. 线性回归时间序列预测概述
## 1.1 预测方法简介
线性回归作为统计学中的一种基础而强大的工具,被广泛应用于时间序列预测。它通过分析变量之间的关系来预测未来的数据点。时间序列预测是指利用历史时间点上的数据来预测未来某个时间点上的数据。
## 1.2 时间序列预测的重要性
在金融分析、库存管理、经济预测等领域,时间序列预测的准确性对于制定战略和决策具有重要意义。线性回归方法因其简单性和解释性,成为这一领域中一个不可或缺的工具。
## 1.3 线性回归模型的适用场景
尽管线性回归在处理非线性关系时存在局限,但在许多情况下,线性模型可以提供足够的准确度,并且计算效率高。本章将介绍线
【特征选择工具箱】:R语言中的特征选择库全面解析

# 1. 特征选择在机器学习中的重要性
在机器学习和数据分析的实践中,数据集往往包含大量的特征,而这些特征对于最终模型的性能有着直接的影响。特征选择就是从原始特征中挑选出最有用的特征,以提升模型的预测能力和可解释性,同时减少计算资源的消耗。特征选择不仅能够帮助我
【高维数据降维挑战】:PCA的解决方案与实践策略
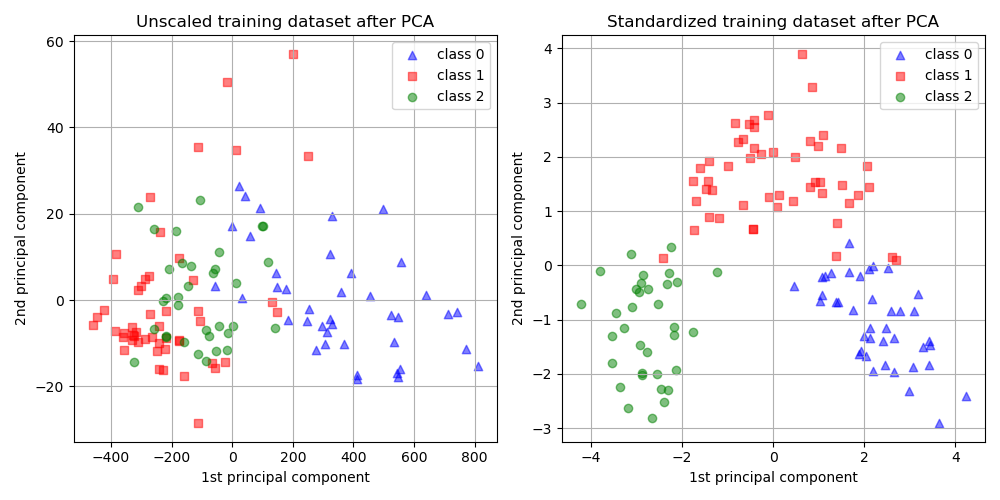
# 1. 高维数据降维的基本概念
在现代信息技术和大数据飞速发展的背景下,数据维度爆炸成为了一项挑战。高维数据的降维可以理解为将高维空间中的数据点投影到低维空间的过程,旨在简化数据结构,降低计算复杂度,同时尽可能保留原始数据的重要特征。
高维数据往往具有以下特点:
- **维度灾难**:当维度数量增加时,数据点在高维空间中的分布变得稀疏,这使得距离和密度等概念变得不再适用
大样本理论在假设检验中的应用:中心极限定理的力量与实践
# 1. 中心极限定理的理论基础
## 1.1 概率论的开篇
概率论是数学的一个分支,它研究随机事件及其发生的可能性。中心极限定理是概率论中最重要的定理之一,它描述了在一定条件下,大量独立随机变量之和(或平均值)的分布趋向于正态分布的性
p值在机器学习中的角色:理论与实践的结合

# 1. p值在统计假设检验中的作用
## 1.1 统计假设检验简介
统计假设检验是数据分析中的核心概念之一,旨在通过观察数据来评估关于总体参数的假设是否成立。在假设检验中,p值扮演着决定性的角色。p值是指在原
数据清洗的概率分布理解:数据背后的分布特性

# 1. 数据清洗的概述和重要性
数据清洗是数据预处理的一个关键环节,它直接关系到数据分析和挖掘的准确性和有效性。在大数据时代,数据清洗的地位尤为重要,因为数据量巨大且复杂性高,清洗过程的优劣可以显著影响最终结果的质量。
## 1.1 数据清洗的目的
数据清洗
【复杂数据的置信区间工具】:计算与解读的实用技巧
# 1. 置信区间的概念和意义
置信区间是统计学中一个核心概念,它代表着在一定置信水平下,参数可能存在的区间范围。它是估计总体参数的一种方式,通过样本来推断总体,从而允许在统计推断中存在一定的不确定性。理解置信区间的概念和意义,可以帮助我们更好地进行数据解释、预测和决策,从而在科研、市场调研、实验分析等多个领域发挥作用。在本章中,我们将深入探讨置信区间的定义、其在现实世界中的重要性以及如何合理地解释置信区间。我们将逐步揭开这个统计学概念的神秘面纱,为后续章节中具体计算方法和实际应用打下坚实的理论基础。
# 2. 置信区间的计算方法
## 2.1 置信区间的理论基础
### 2.1.1
正态分布与信号处理:噪声模型的正态分布应用解析
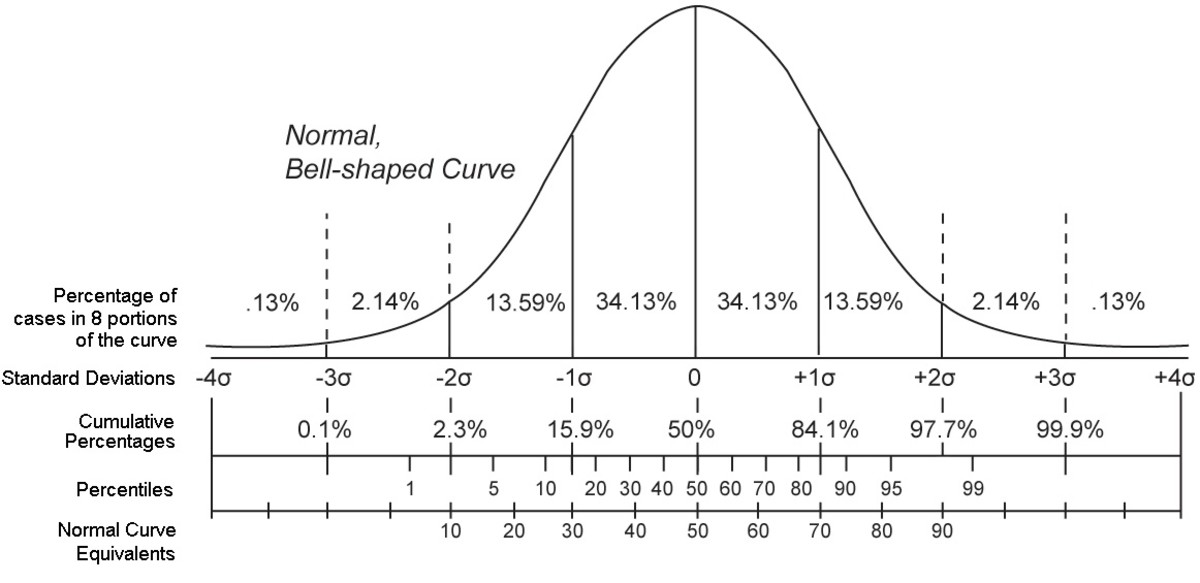
# 1. 正态分布的基础理论
正态分布,又称为高斯分布,是一种在自然界和社会科学中广泛存在的统计分布。其因数学表达形式简洁且具有重要的统计意义而广受关注。本章节我们将从以下几个方面对正态分布的基础理论进行探讨。
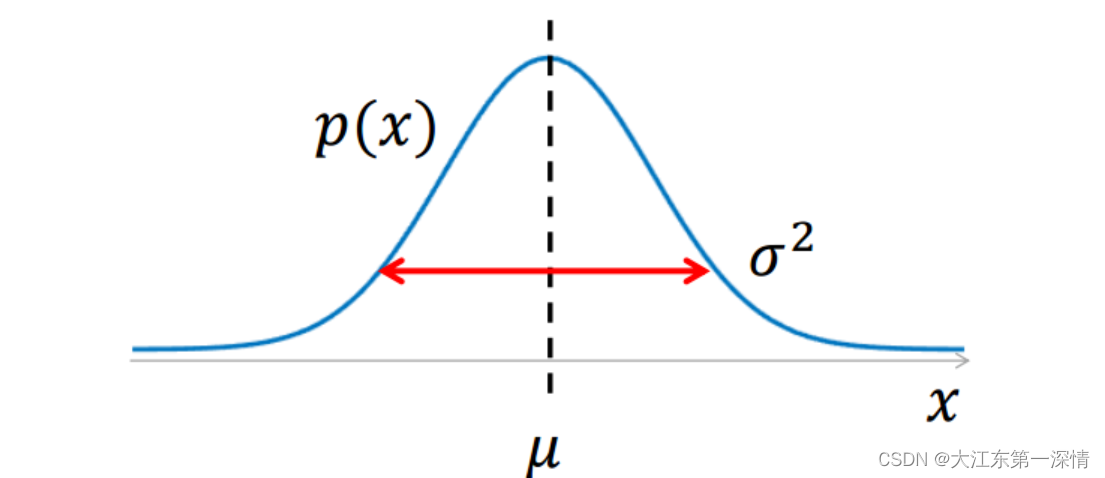
## 正态分布的数学定义
正态分布可以用参数均值(μ)和标准差(σ)完全描述,其概率密度函数(PDF)表达式为:
```math
f(x|\mu,\sigma^2) = \frac{1}{\sqrt{2\pi\sigma^2}} e
【品牌化的可视化效果】:Seaborn样式管理的艺术

# 1. Seaborn概述与数据可视化基础
## 1.1 Seaborn的诞生与重要性
Seaborn是一个基于Python的统计绘图库,它提供了一个高级接口来绘制吸引人的和信息丰富的统计图形。与Matplotlib等绘图库相比,Seaborn在很多方面提供了更为简洁的API,尤其是在绘制具有多个变量的图表时,通过引入额外的主题和调色板功能,大大简化了绘图的过程。Seaborn在数据科学领域得
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )