【Advanced】Signal Beamforming and Spatial Filtering in MATLAB
发布时间: 2024-09-14 06:17:59 阅读量: 70 订阅数: 83 
# Theoretical Foundations of Beamforming
Beamforming is a technique that enhances signals from a specific direction by coherently processing signals received from multiple sensors, while suppressing interference and noise from other directions. Its fundamental principle is based on the phenomenon of wave interference.
When multiple sensors receive the same signal, due to the differences in signal propagation distances, the signal phase received at the sensors will vary. By adjusting these phases, signals from a specific direction can be made to be in phase, thus achieving signal enhancement. Signals from other directions, due to different phases, will cancel each other out, thus achieving interference suppression.
# Beamforming Implementation in MATLAB
### 2.1 Basic Beamforming Algorithm
The basic beamforming algorithm is the simplest and most commonly used method in beamforming. It forms a beam by summing up or phase-aligning signals from all sensors in the array.
#### 2.1.1 Delay-and-sum Beamforming
Delay-and-sum beamforming forms a beam by adding up signals from all sensors in the array. This method can effectively suppress interference signals from the array's sides, but it cannot distinguish signals from different directions.
**Code block:**
```
% Delay-and-sum beamforming
N = 10; % Number of sensors
theta = 0:0.1:360; % Range of angles
delay = zeros(N, length(theta));
for i = 1:N
delay(i, :) = (i-1) * d * sin(theta * pi / 180) / c;
end
signal = exp(1j * 2 * pi * f * delay);
beamformed_signal = sum(signal, 1);
% Plotting the beam pattern
figure;
polarplot(theta, abs(beamformed_signal));
title('Delay-and-sum Beam Pattern');
```
**Logical Analysis:**
* The `delay` matrix stores the delay values for each sensor signal to compensate for the differences in signal propagation time.
* The `signal` matrix contains signals from all sensors.
* The `beamformed_signal` is the signal after beamforming.
* The `polarplot` function plots the beam pattern, showing the gain at different angles.
#### 2.1.2 Phase-sum Beamforming
Phase-sum beamforming forms a beam by phase-aligning signals from all sensors in the array. This method can effectively suppress interference signals from the array's sides and distinguish signals from different directions.
**Code block:**
```
% Phase-sum beamforming
N = 10; % Number of sensors
theta = 0:0.1:360; % Range of angles
phase_shift = zeros(N, length(theta));
for i = 1:N
phase_shift(i, :) = (i-1) * d * sin(theta * pi / 180) * 2 * pi / lambda;
end
signal = exp(1j * phase_shift);
beamformed_signal = sum(signal, 1);
% Plotting the beam pattern
figure;
polarplot(theta, abs(beamformed_signal));
title('Phase-sum Beam Pattern');
```
**Logical Analysis:**
* The `phase_shift` matrix stores the phase shift values for each sensor signal to compensate for the phase differences in signal propagation.
* The `signal` matrix contains signals from all sensors.
* The `beamformed_signal` is the signal after beamforming.
* The `polarplot` function plots the beam pattern, showing the gain at different angles.
### 2.2 Adaptive Beamforming Algorithms
Adaptive beamforming algorithms can dynamically adjust the beam shape according to the signal environment to suppress interference signals and enhance target signals.
#### 2.2.1 Minimum Mean Square Error (MSE) Algorithm
The minimum mean square error (MSE) algorithm adjusts the beam weights by minimizing the mean square error of the beamforming output signal. This algorithm can effectively suppress interference signals from the array's sides and distinguish signals from different directions.
**Code block:**
```
% MSE-based beamforming
N = 10; % Number of sensors
theta = 0:0.1:360; % Range of angles
R = cov(signal); % Signal covariance matrix
P = inv(R); % Inverse of the covariance matrix
w = P * steering_vector(theta); % Beam weights
beamformed_signal = w' * signal;
% Plotting the beam pattern
figure;
polarplot(theta, abs(beamformed_signal));
title('MSE-based Beam Pattern');
```
**Logical Analysis:**
* The `R` matrix is the signal covariance matrix.
* The `P` matrix is the inverse of the covariance matrix.
* The `steering_vector` function returns the steering vector for a given angle.
* The `w` vector is the beam weight.
* The `beamformed_signal` is the signal af

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【C#内存管理与事件】:防止泄漏,优化资源利用
# 摘要
本文深入探讨了C#语言中的内存管理技术,重点关注垃圾回收机制和内存泄漏问题。通过分析垃圾回收的工作原理、内存分配策略和手动干预技巧,本文提供了识别和修复内存泄漏的有效方法。同时,本文还介绍了一系列优化C#内存使用的实践技巧,如对象池、引用类型选择和字符串处理策略,以及在事件处理中如何管理内存和避免内存泄漏。此外,文中还讨论了使用内存分析工具和最佳实践来进一步提升应用程序的内存效率。通过对高级内存管理技术和事件处理机制的结合分析,本文旨在为C#开发者提供全面的内存管理指南,以实现高效且安全的事件处理和系统性能优化。
# 关键字
C#内存管理;垃圾回收;内存泄漏;优化内存使用;事件处理
【维护Electron应用的秘诀】:使用electron-updater轻松管理版本更新

# 摘要
随着软件开发模式的演进,Electron应用因其跨平台的特性在桌面应用开发中备受青睐。本文深入探讨了Electron应用版本更新的重要性,详细分析了electron-updater模块的工作机制、
高性能计算新挑战:zlib在大规模数据环境中的应用与策略
# 摘要
随着数据量的激增,高性能计算成为处理大规模数据的关键技术。本文综合探讨了zlib压缩算法的理论基础及其在不同数据类型和高性能计算环境中的应用实践。文中首先介绍了zlib的设计目标、压缩解压原理以及性能优化策略,然后通过文本和二进制数据的压缩案例,分析了zlib的应用效果。接着探讨了zlib在高性能计算集成、数据流处理优化方面的实际应用,以及在网络传输、分布式存储环境下的性能挑战与应对策略。文章最后对
ADPrep故障诊断手册

# 摘要
ADPrep工具在活动目录(Active Directory)环境中的故障诊断和维护工作中扮演着关键角色。本文首先概述了ADPrep工具的功能和在故障诊断准备中的应用,接着详细分析了常见故障的诊断理论基础及其实践方法,并通过案例展示了故障排查的过程和最佳实践。第三章进一步讨论了常规和高级故障排查技巧,包括针对特定环
步进电机热管理秘籍:散热设计与过热保护的有效策略
# 摘要
本文系统介绍了步进电机热管理的基础知识、散热设计理论与实践、过热保护机制构建以及案例研究与应用分析。首先,阐述了步进电机散热设计的基本原理和散热材料选择的重要性。其次,分析了散热解决方案的创新与优化策略。随后,详细讨论了过热保护的理论基础、硬件实施及软件策略。通过案例研究,本文展示了散热设计与过热保护系统的实际应用和效果评估。最后,本文对当前步进电机热管理技术的挑战、发展前景以及未来研究方向进行了探讨和展望。
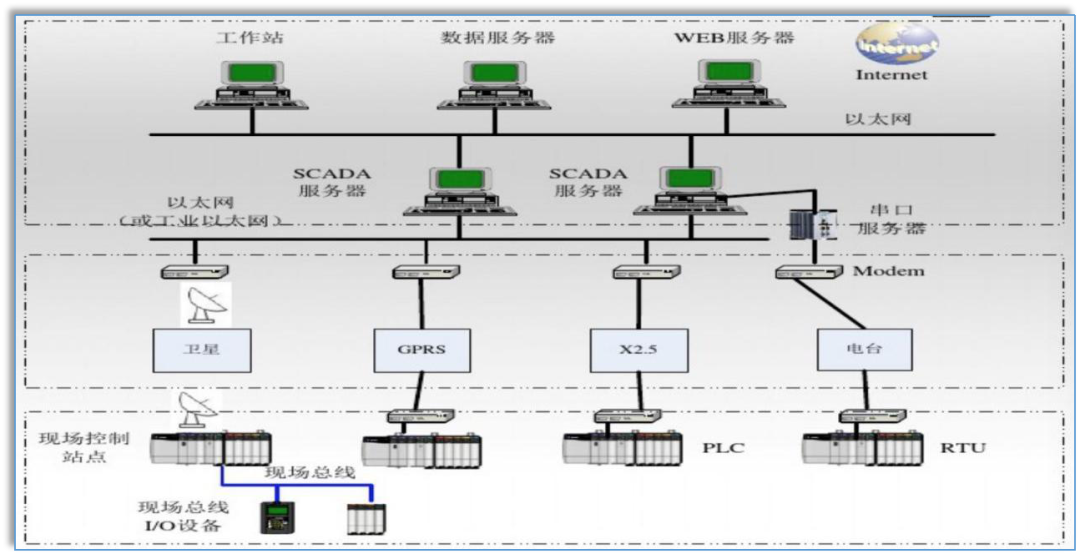
SCADA系统网络延迟优化实战:从故障到流畅的5个步骤
# 摘要
SCADA系统作为工业自动化中的关键基础设施,其网络延迟问题直接影响到系统的响应速度和控制效率。本文从SCADA系统的基本概念和网络延迟的本质分析入手,探讨了延迟的类型及其影响因素。接着,文章重点介绍了网络延迟优化的理论基础、诊断技术和实施策略,以及如何将理论模型与实际情况相结合,提出了一系列常规和高级的优化技术。通过案例分析,本文还展示了优化策略在实际SCADA系统中的应用及其效果评
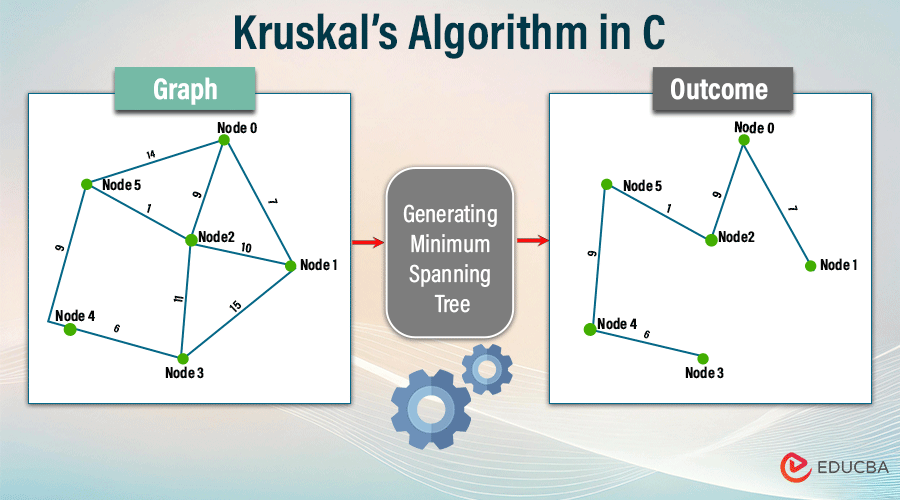
【USACO数学问题解析】:数论、组合数学在算法中的应用,提升你的算法思维
# 摘要
本文探讨了数论和组合数学在USACO算法竞赛中的应用。首先介绍了数论的基础知识,包括整数分解、素数定理、同余理论、欧拉函数以及费马小定理,并阐述了这些理论在USACO中的具体应用和算法优化。接着,文中转向组合数学,分析了排列组合、二项式定理、递推关系和生成函数以及图论基础和网络流问题。最后,本文讨论了USACO算
SONET基础:掌握光纤通信核心技术,提升网络效率

# 摘要
同步光网络(SONET)是一种广泛应用于光纤通信中的传输技术,它提供了一种标准的同步数据结构,以支持高速网络通信。本文首先回顾了SONET的基本概念和历史发展,随后深入探讨了其核心技术原理,包括帧结构、层次模型、信号传输、网络管理以及同步问题。在第三章中,文章详细说明了SONET的网络设计、部署以及故障诊断和处理策略。在实践应用方面,第四章分析了SONET在
SM2258XT固件更新策略:为何保持最新状态至关重要

# 摘要
SM2258XT固件作为固态硬盘(SSD)中的关键软件组件,其更新对设备性能、稳定性和数据安全有着至关重要的作用。本文从固件更新的重要性入手,深入探讨了固件在SSD中的角色、性能提升、以及更新带来的可靠性增强和安全漏洞修复。同时,本文也不忽视固件更新可能带来的风险,讨论了更新失败的后果和评估更新必要性的方法。通过制定和执
Quoted-printable编码:从原理到实战,彻底掌握邮件编码的艺术
# 摘要
Quoted-printable编码是一种用于电子邮件等场景的编码技术,它允许非ASCII字符在仅支持7位的传输媒介中传输。本文首先介绍Quoted-printable编码的基本原理和技术分析,包括编码规则、与MIME标准的关系及解码过程。随后,探讨了Quoted-printable编码在邮件系统、Web开发和数据存储等实战应用中的使用,以及在不同场景下的处理方法。文章还
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )