[Advanced Chapter] Design and Implementation of Adaptive Filters in MATLAB
发布时间: 2024-09-14 06:10:28 阅读量: 29 订阅数: 66 
# 1. Introduction to Adaptive Filters
Adaptive filters are a powerful signal processing technique used to deal with time-varying signals and environments. They continuously adjust their filter weights to adapt to the statistical characteristics of the input signal, thereby achieving effective filtering and enhancement of the signal. Adaptive filters are widely used in various fields, including noise reduction, system identification, echo cancellation, and prediction, among others.
# 2. Theoretical Principles of Adaptive Filter Algorithms
### 2.1 Minimum Mean Square Error (MSE) Criterion
The goal of an adaptive filter is to continuously adjust the filter weights to minimize the Mean Square Error (MSE) between the filter output and the desired signal. MSE is defined as:
```
MSE = E[(d(n) - y(n))^2]
```
Where:
* d(n) is the desired signal
* y(n) is the filter output
### 2.2 Filter Weight Update Algorithms
To minimize the MSE, ***mon weight update algorithms include:
#### 2.2.1 Gradient Descent Method
The gradient descent method is an iterative algorithm that updates weights by calculating the gradient of the MSE:
```
w(n+1) = w(n) - α * ∇MSE(w(n))
```
Where:
* w(n) is the current weight vector
* α is the learning rate
* ∇MSE(w(n)) is the gradient of the MSE
#### 2.2.2 Least Squares Method
The least squares method updates weights by minimizing the sum of squared errors:
```
w(n) = (X^T X)^-1 X^T d
```
Where:
* X is the input signal matrix
* d is the desired signal vector
#### 2.2.3 Recursive Least Squares Method (RLS)
The Recursive Least Squares (RLS) method is an algorithm that updates weights online using a covariance matrix to estimate the optimal values of the weights:
```
P(n) = P(n-1) - P(n-1) X(n) X(n)^T P(n-1) / (1 + X(n)^T P(n-1) X(n))
w(n) = w(n-1) + P(n) X(n) (d(n) - X(n)^T w(n-1))
```
Where:
* P(n) is the covariance matrix
* X(n) is the current input signal vector
### 2.3 Filter Stability Analysis
#### 2.3.1 Convergence Conditions
To ensure filter stability, convergence conditions must be met. For the gradient descent method, the convergence condition is:
```
0 < α < 2 / λ_max
```
Where:
* α is the learning rate
* λ_max is the maximum eigenvalue of the input signal autocorrelation matrix
#### 2.3.2 Steady-state Error
When the filter converges, there is a steady-state error, which is caused by the noise in the input signal and the filter order. The steady-state error can be represented as:
```
e_ss =
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【实时系统空间效率】:确保即时响应的内存管理技巧

# 1. 实时系统的内存管理概念
在现代的计算技术中,实时系统凭借其对时间敏感性的要求和对确定性的追求,成为了不可或缺的一部分。实时系统在各个领域中发挥着巨大作用,比如航空航天、医疗设备、工业自动化等。实时系统要求事件的处理能够在确定的时间内完成,这就对系统的设计、实现和资源管理提出了独特的挑战,其中最为核心的是内存管理。
内存管理是操作系统的一个基本组成部
极端事件预测:如何构建有效的预测区间
# 1. 极端事件预测概述
极端事件预测是风险管理、城市规划、保险业、金融市场等领域不可或缺的技术。这些事件通常具有突发性和破坏性,例如自然灾害、金融市场崩盘或恐怖袭击等。准确预测这类事件不仅可挽救生命、保护财产,而且对于制定应对策略和减少损失至关重要。因此,研究人员和专业人士持
学习率对RNN训练的特殊考虑:循环网络的优化策略
# 1. 循环神经网络(RNN)基础
## 循环神经网络简介
循环神经网络(RNN)是深度学习领域中处理序列数据的模型之一。由于其内部循环结
【算法竞赛中的复杂度控制】:在有限时间内求解的秘籍
# 1. 算法竞赛中的时间与空间复杂度基础
## 1.1 理解算法的性能指标
在算法竞赛中,时间复杂度和空间复杂度是衡量算法性能的两个基本指标。时间复杂度描述了算法运行时间随输入规模增长的趋势,而空间复杂度则反映了算法执行过程中所需的存储空间大小。理解这两个概念对优化算法性能至关重要。
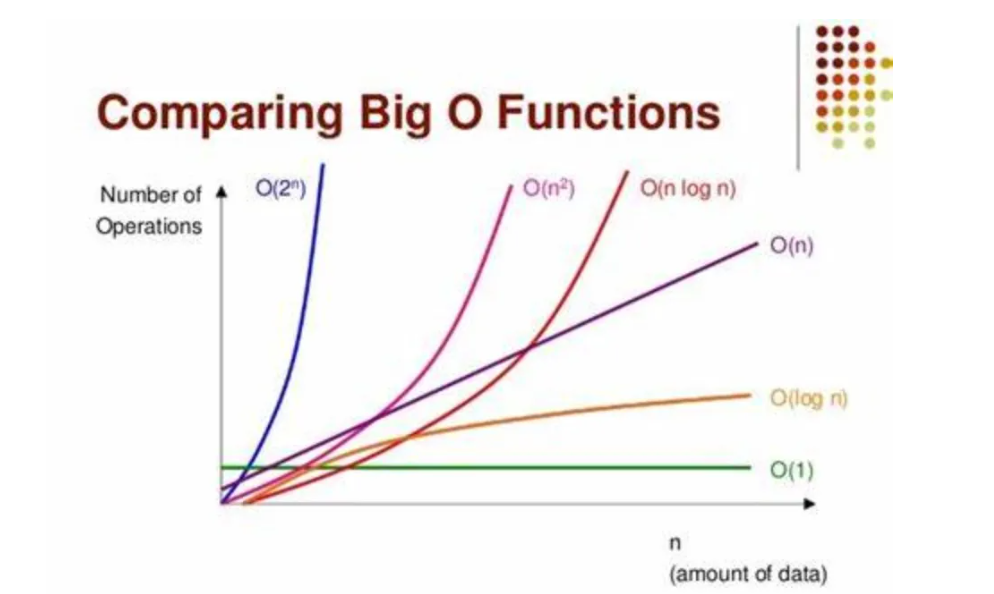
## 1.2 大O表示法的含义与应用
大O表示法是用于描述算法时间复杂度的一种方式。它关注的是算法运行时
时间序列分析的置信度应用:预测未来的秘密武器
# 1. 时间序列分析的理论基础
在数据科学和统计学中,时间序列分析是研究按照时间顺序排列的数据点集合的过程。通过对时间序列数据的分析,我们可以提取出有价值的信息,揭示数据随时间变化的规律,从而为预测未来趋势和做出决策提供依据。
## 时间序列的定义
时间序列(Time Series)是一个按照时间顺序排列的观测值序列。这些观测值通常是一个变量在连续时间点的测量结果,可以是每秒的温度记录,每日的股票价
Epochs调优的自动化方法
# 1. Epochs在机器学习中的重要性
机器学习是一门通过算法来让计算机系统从数据中学习并进行预测和决策的科学。在这一过程中,模型训练是核心步骤之一,而Epochs(迭代周期)是决定模型训练效率和效果的关键参数。理解Epochs的重要性,对于开发高效、准确的机器学习模型至关重要。
在后续章节中,我们将深入探讨Epochs的概念、如何选择合适值以及影响调优的因素,以及如何通过自动化方法和工具来优化Epochs的设置,从而
激活函数理论与实践:从入门到高阶应用的全面教程

# 1. 激活函数的基本概念
在神经网络中,激活函数扮演了至关重要的角色,它们是赋予网络学习能力的关键元素。本章将介绍激活函数的基础知识,为后续章节中对具体激活函数的探讨和应用打下坚实的基础。
## 1.1 激活函数的定义
激活函数是神经网络中用于决定神经元是否被激活的数学函数。通过激活函数,神经网络可以捕捉到输入数据的非线性特征。在多层网络结构
【损失函数与随机梯度下降】:探索学习率对损失函数的影响,实现高效模型训练

# 1. 损失函数与随机梯度下降基础
在机器学习中,损失函数和随机梯度下降(SGD)是核心概念,它们共同决定着模型的训练过程和效果。本
【批量大小与存储引擎】:不同数据库引擎下的优化考量

# 1. 数据库批量操作的理论基础
数据库是现代信息系统的核心组件,而批量操作作为提升数据库性能的重要手段,对于IT专业人员来说是不可或缺的技能。理解批量操作的理论基础,有助于我们更好地掌握其实践应用,并优化性能。
## 1.1 批量操作的定义和重要性
批量操作是指在数据库管理中,一次性执行多个数据操作命
机器学习性能评估:时间复杂度在模型训练与预测中的重要性
# 1. 机器学习性能评估概述
## 1.1 机器学习的性能评估重要性
机器学习的性能评估是验证模型效果的关键步骤。它不仅帮助我们了解模型在未知数据上的表现,而且对于模型的优化和改进也至关重要。准确的评估可以确保模型的泛化能力,避免过拟合或欠拟合的问题。
## 1.2 性能评估指标的选择
选择正确的性能评估指标对于不同类型的机器学习任务至关重要。例如,在分类任务中常用的指标有
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )