
6
解决方案
简化场景
•使用退役
的小区作
为作为测
试场景
•标志清晰
定义
•限速规定
•其他情况
从示例开
始
•从MATLAB
的帮助文档
的ACC示例
模型开始设
计,验证可
行性。
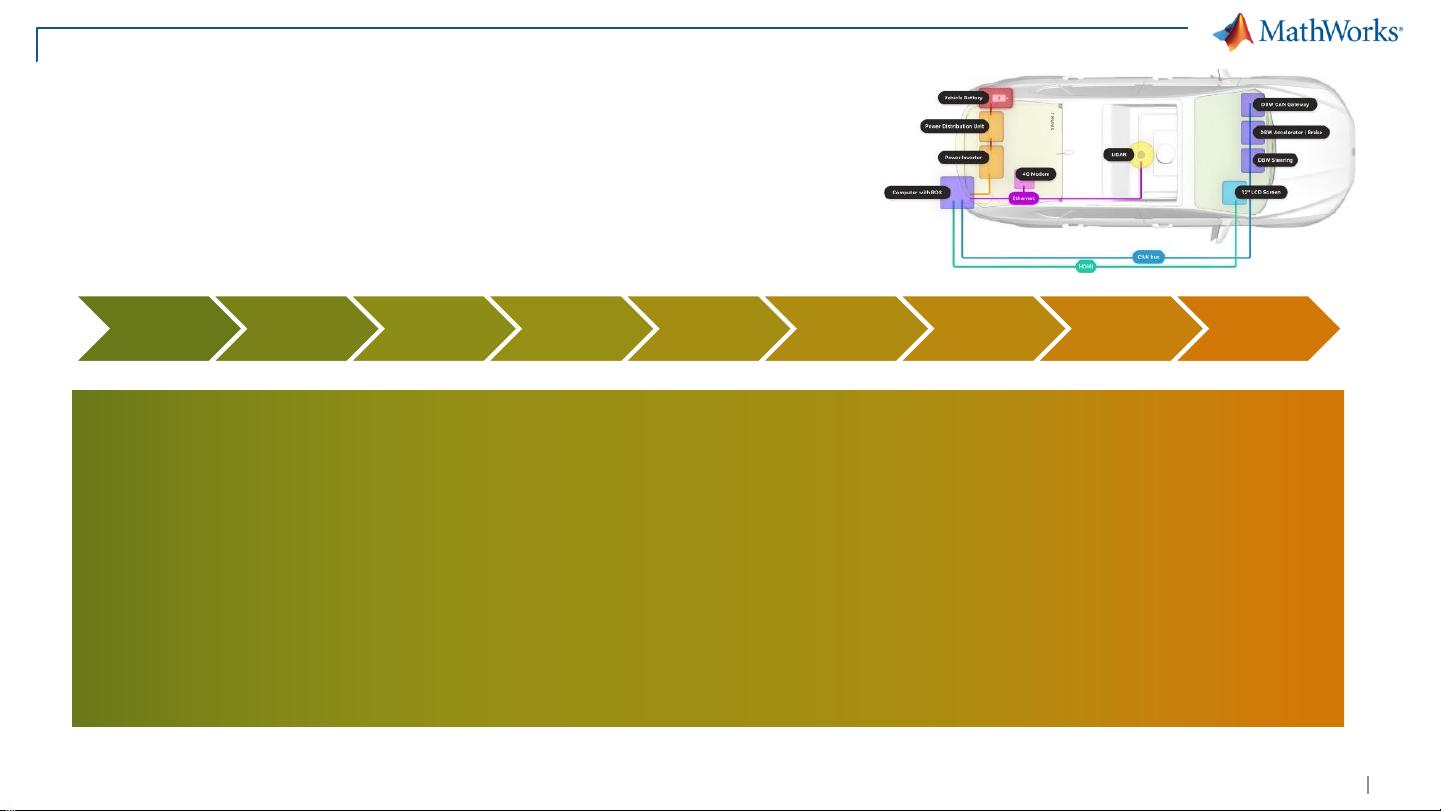
模块化
•将感知、规划
和控制等作为
ROS节点处
理。
•使用ROS工
具箱这些模块
链接起来成为
一个整体。
车辆建模
•基于第一原
理, 在
Simulink中
建立出租车
的运动学模
型,并作为
控制设计的
被控对象。
细化功能
•修改MPC
参数,并添
加Stateflow
逻辑策略模
型处理边界
问题、场景
切换
ROS节点
•调试过程中,
通过ROS传
输了海量数
据
(10+G),
加速在
MATLAB中
进行分析。
闭环仿真
•在MATLAB
中进行闭环
仿真,分析
系统行为和
性能在可接
受的范围内
代码生成
•生成C++代
码到实车中
进行车载测
试。实车测
试发现乘车
体验很差。
•通过模型,
调整加减速
约束等,优
化MPC控制
器,并快速
重新C++控
制节点实现
快速迭代。
虚拟测试
•创建虚拟测
试场景进行
制动测试。
使用Simulink
创建随机行
为的同行车
辆和行为,
测试控制器
的制动性能
和平稳性。
剩余27页未读,继续阅读















