
法直接观测到马尔可夫过程的内部状态序列以及其转移过程。
HMM 分为一阶模型和二阶、三阶等等高阶模型,在语音识别中常用的是一阶隐马尔
可夫模型。同高阶相比,一阶模型参数少,训练、解码的计算量都比较少,更重要的是它
也可以提供很高的准确度。本文语音识别系统中声学模型就是基于一阶 HMM 的。
根据以上论述,我们可以设有一个马尔可夫过程,它有 N 个状态,T 个时刻,某个
时刻 t 只能处于这 N 个状态中的某一个状态,那么任意时刻 t 所处的状态为
t
q
。我们可以
这样定义隐马尔可夫模型:一个隐马可夫模型包括三个参数(A,B,π),其中:
A = {
ij
a
},
ij
a
= P(
t
q
=
j
|
1t
q
-
=
i
),
i
=1~N :其中的
ij
a
表示从状态
i
转移到状态
j
的
概率;
B = {
( )
j t
b o
},
( )
j t
b o
= P(
t
o
|
t
q
=
j
),
j
=1~N,t=1~N:其中
( )
j t
b o
表示在状态
i
时随机变量
t
o
的概率密度分布函数。
p
= {
i
p
},
i
p
= P(
1
q
=
i
),
i
=1~N:其中
i
p
表示初始状态处于
i
的概率。
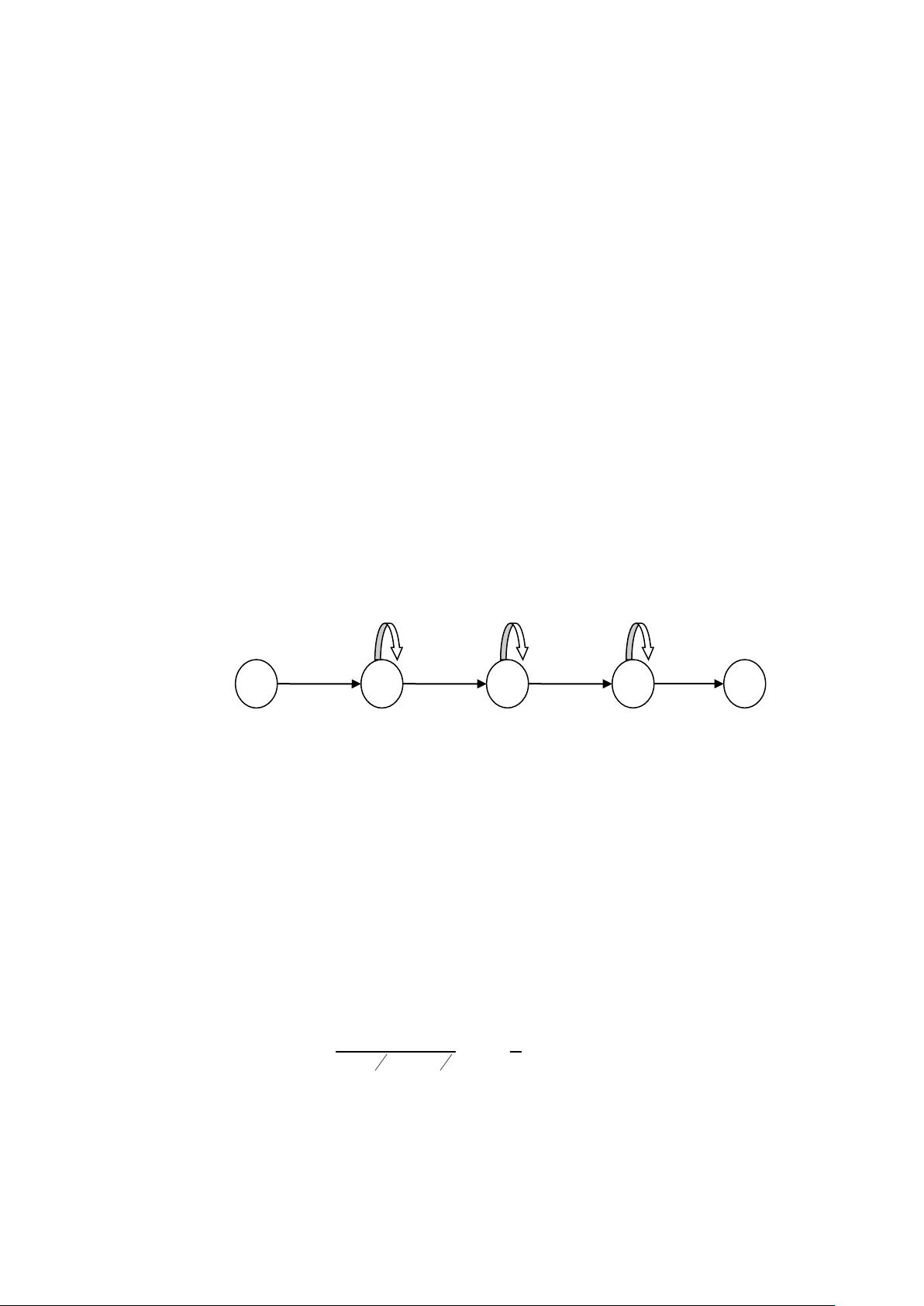
根据以上定义,隐马尔可夫模型可以被描述为一个拓扑结构,它由节点和路径组成。
每一个节点表示一个状态,各个状态之间可以任意跳转。图 2-2 是一个隐马尔可夫的有限
状态图。
图 2-2 隐马尔可夫模型拓扑结构示意图
Fig.2-2 HMM topology configuration
上图中一个圆圈节点表示一个状态,每一条弧线表示一种可能的路径跳转。模型的参数有
状态集 S={1,2,……,N}(N 表示模型的状态数,如上图的 N=5),初始化参数,状态
转移概率和某一状态时的概率密度分布函数。分别对应上文提到的
p
、A 和 B。本文中所
用到的概率密度函数都是混合高斯密度函数,记为
1
0
( , )
M
ik ik ik
J
b C N u ij
-
=
=
å å
(2.1)
式中
( , )
ik
N u ij
å
=
1
1
2 2
1 1
exp
2
(2 ) | |
T
ij ij
D
u ij u
ij
p
-
-
æ ö
-
ç ÷
è ø
å
å
(2.2)
式中,
ik
C
表示每个高斯的加权系数,
ik
u
表示均值,
ij
å
表示方差矩阵。


剩余65页未读,继续阅读

omyligaga
- 粉丝: 61
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


