Apollo自动驾驶实战:从理论到本机演示
需积分: 5 129 浏览量
更新于2024-08-05
1
收藏 1.27MB PDF 举报
" Apollo是一个开放的自动驾驶平台,旨在帮助汽车制造商和自动驾驶领域的合作伙伴构建自己的自动驾驶系统。本教程涉及Apollo的代码结构、核心模块、软件架构、数据流过程以及版本更新内容,并提供了一步步的实战指导。"
Apollo平台的核心知识点:
1. **Apollo的定义与目标**:
- Apollo是一个开放源码的自动驾驶平台,旨在简化自动驾驶系统的开发过程,允许合作伙伴结合车辆和硬件系统,快速构建定制化的自动驾驶解决方案。
2. **代码结构**:
- Apollo的代码结构包括Docker(用于隔离和管理环境)、Docs(存放文档)、Modules(核心算法模块)、Scripts和Tools等组件。
- Modules下有Perception、Localization、Prediction、高精地图等多个子模块,分别对应感知、定位、预测和路径规划等功能。
3. **软件架构与模块**:
- Apollo采用抽象类和工厂方法设计,具有高效和可扩展性。
- 数据流过程:高精地图和定位获取场景信息 -> 感知模块检测障碍物 -> 预测模块预测障碍物轨迹 -> 规划模块规划路线 -> 控制模块执行控制指令。
4. **版本更新**:
- 从2.5版开始,引入RelativeMap逻辑单元,允许在无需高精地图的场景中进行自动驾驶,简化Demo搭建。
- 在3.0版本,增强了安全模块,如引入熔断机制,在紧急情况下直接对车辆进行刹车控制。
5. **实战流程**:
- 提供了Apollo软件的安装步骤,涵盖了从环境准备到各个模块的配置和运行,帮助用户逐步实践自动驾驶功能。
6. **自动驾驶门槛**:
- 自动驾驶技术的开发具有较高的技术要求,需要综合理解高精度地图、传感器融合、决策规划等多个领域。
通过这个进阶课程,学习者可以深入了解Apollo平台的运作原理,掌握如何在本地环境中设置和运行Apollo系统,从而具备构建和调试自动驾驶系统的基础能力。同时,随着版本的迭代,学习者还需要关注Apollo的新特性和改进,以便持续优化和适应自动驾驶的最新发展。
进阶课程
㊶
丨Apollo实战——本机演示实战
Apollo是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和
硬件系统,快速搭建一套属于自己的自动驾驶系统。
以下,E N J O Y
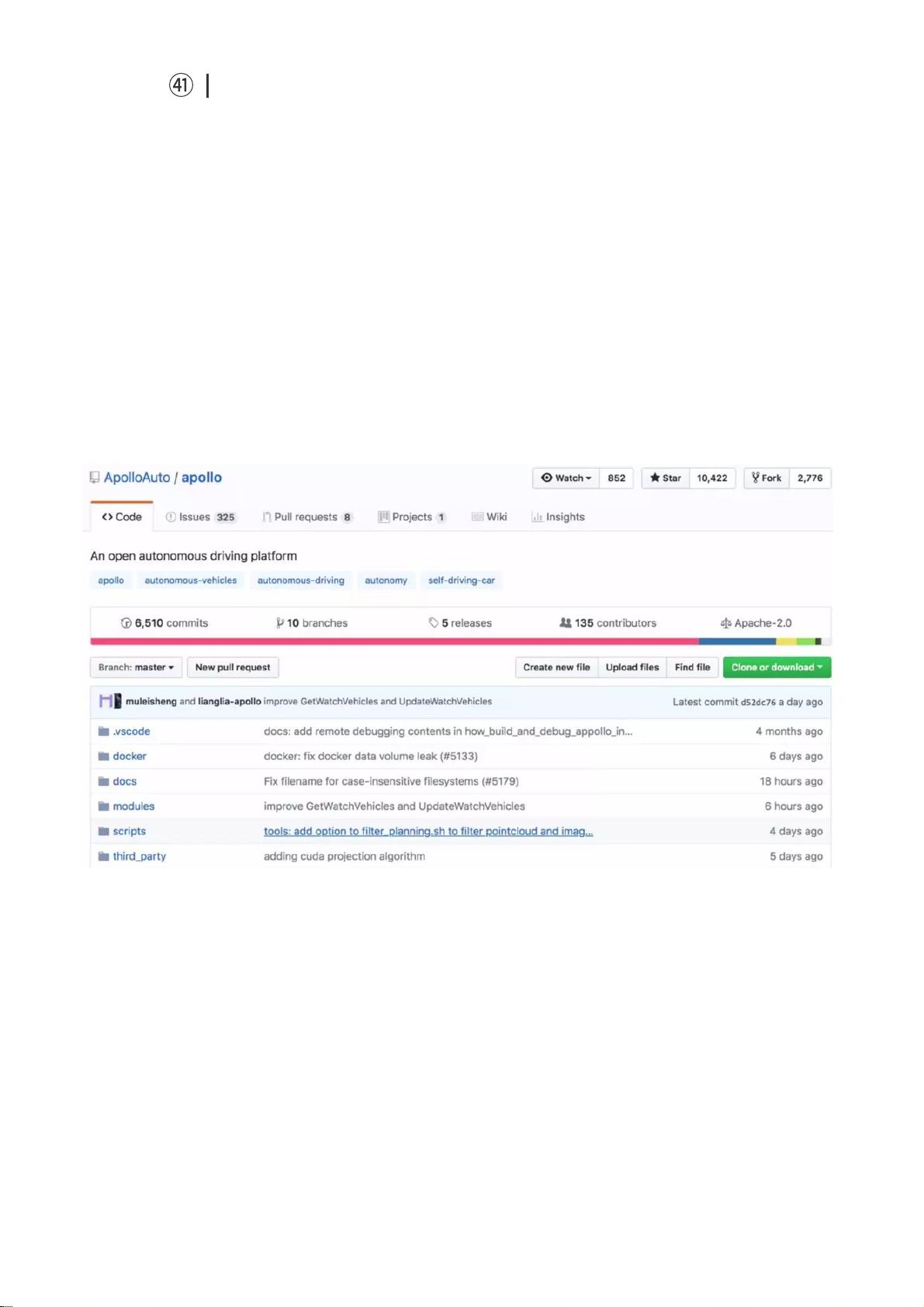
要使用Apollo进行实战,首先要对Apollo的代码结构有一个基本的认识。图1是Apollo项目的基本代
码结构。包括Docker和Docs(主要放置一些文档)、Modules(核心模块算法都在该文件夹下)以
及Scripts和Tools等。
图1 Apollo项目的代码结构
Modules下的文件目录结构如图2所示。
下载后可阅读完整内容,剩余4页未读,立即下载
2022-05-04 上传
2022-04-17 上传
2023-07-28 上传
2024-01-30 上传
2023-09-15 上传
2023-05-17 上传
2023-07-16 上传
2023-07-23 上传
2024-04-20 上传

疯狂的机器人
- 粉丝: 8846
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- Hadoop生态系统与MapReduce详解
- MDS系列三相整流桥模块技术规格与特性
- MFC编程:指针与句柄获取全面解析
- LM06:多模4G高速数据模块,支持GSM至TD-LTE
- 使用Gradle与Nexus构建私有仓库
- JAVA编程规范指南:命名规则与文件样式
- EMC VNX5500 存储系统日常维护指南
- 大数据驱动的互联网用户体验深度管理策略
- 改进型Booth算法:32位浮点阵列乘法器的高速设计与算法比较
- H3CNE网络认证重点知识整理
- Linux环境下MongoDB的详细安装教程
- 压缩文法的等价变换与多余规则删除
- BRMS入门指南:JBOSS安装与基础操作详解
- Win7环境下Android开发环境配置全攻略
- SHT10 C语言程序与LCD1602显示实例及精度校准
- 反垃圾邮件技术:现状与前景
