
第 8 期
肖舒严,等:基于稳健加权总体最小二乘的变压器局部放电定位
变压器油箱内部的主要元件为绕组和铁芯,超
声波可通过衍射穿过绕组,但绕组附着在铁芯上,超
声波会在铁芯表面发生折反射,如附录 A 中的图 A2
所示。由于铁芯声速大于油中声速,若超声波传播路
径经过铁芯,则传播时间将明显缩短,超声的等值声
速明显提升,其等值声速通常为 1 400~3000 m/s
[23]
,
1 400 m/s 与实际等值声速的误差可视为粗差。此
外,油温、压力的改变也会造成声速误差
[24]
。
1.2 粗差对现有局部放电 TDOA 定位算法的影响
目前主流的 TDOA 局部放电定位算法
[11⁃13]
依据
计算时差与测量时差差值的绝对值之和或者平方和
等建立目标函数。采用计算时差与测量时差差值的
平方和建立目标函数 f
COST
如式(2)所示。
f
COST
=
∑
i = 2
4
{
[
(x - x
i
)
2
+( y - y
i
)
2
+( z - z
i
)
2
-
}
]
(x - x
1
)
2
+( y - y
1
)
2
+( z - z
1
)
2
/v - τ
i1
2
(2)
由上式可得,目标函数中传感器坐标(x
i
,y
i
,z
i
)、
声速 v、时差 τ
i1
均为测量值,使 f
COST
最小的(x,y,z)即
为局部放电源坐标。
测量数据误差分为系统误差、随机误差、离群误
差 3 类。其中,系统误差与随机误差通常满足正态
分布;离群误差也称粗差,通常不满足某一特殊概率
分布,出现频率远低于系统误差和随机误差。将测
量数据误差定义为:
ε
i
=
{
(r - 0.5)
-
Q p + e
i
e
i
i = int (i/L ) × L
i ≠ int (i/L ) × L
(3)
其中,e
i
~N(μ,σ
2
),μ、σ
2
分别为误差的均值期望、方
差;r 为随机数;
-
Q
为多次测量值的平均值;p 为常数,
可通过控制改变 p 来改变粗差大小;int(·)表示取整
运算,每隔 L 个数据产生 1 个粗差。
本文以油浸式变压器 S9-1600/35 为研究对
象,其额定电压为 35 kV/10.5 kV,额定容量为 1 600
kV·A,绕组联结方式为 Yd11,箱体尺寸为 2 300 mm ×
1 800 mm × 2 400 mm。传感器坐标如附录中的表 A1
所示。设置局部放电源坐标和声速 v,根据局部放电
源坐标、传感器坐标、声速计算准确的到达时差 τ
21
、
τ
31
、τ
41
,然后在准确的时差、传感器坐标、波速中加入
误差 ε
i
,运用含有误差的测量数据求得局部放电源
位置,局部放电源位置的计算值与设置值间的距离
为定位误差。计算方法选用遗传算法,迭代次数为
1 000 次,代沟为 0.95,交叉率为 0.75,变异率为 0.07,
每个局部放电源获取 200 组带误差数据,根据每组
数据计算局部放电位置及相应的定位误差,取 200
组数据定位误差的平均值。
对高度为 1 400 mm 水平面上的局部放电源坐标
进行定位模拟,给出定位误差分布图如附录 A中的图
A3 所示。图 A3(a)中,p=0,即不考虑粗差,时差、声
速、传感器坐标测量值时的随机误差分别满足 N(0,
0.004 ms
2
)、N(0,100 mm
2
/ms
2
)、N(0,0.25 mm
2
),系
统误差为 0;图 A3(b)中,p=0.05、L=10,随机误差和
系统误差情况与图 A3(a)中相同。可以看出:当粗
差不存在时,局部放电源的定位误差在 300 mm 以
内,其中定位误差小于200 mm的坐标比例为 0.9474,
定 位 误 差 小 于 100 mm 的 坐 标 比 例 为 0.418 9;当
粗 差存在时,定位误差大幅上升,其中定位误差小
于 200 mm 的 坐 标 比 例 为 0.452 1,定 位 误 差 小 于
100 mm 的坐标比例为 0.107 3,定位误差超过 0.4 m
的区域比例为 1.75 %。此处的定位误差为对同一个
局部放电源测量 200 组数据的平均定位误差,而在
只进行单次或少数次测量的情况下,测量数据中若
出现粗差,定位结果将会非常离谱。
2 基于 RWTLS 的 TDOA 定位抗差算法
加入 1 个传感器(编号为 5),将 TDOA 定位方程
组改写为 LS 的标准形式:
ì
í
î
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
ï
AX = B
A =
é
ë
ê
ê
ê
ê
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
ú
ú
ú
ú
2(x
2
- x
1
) 2(y
2
- y
1
) 2( z
2
- z
1
) 2v
2
τ
21
2(x
3
- x
1
) 2(y
3
- y
1
) 2( z
3
- z
1
) 2v
2
τ
31
2(x
4
- x
1
) 2(y
4
- y
1
) 2( z
4
- z
1
) 2v
2
τ
41
2(x
5
- x
1
) 2(y
5
- y
1
) 2( z
5
- z
1
) 2v
2
τ
51
X =
é
ë
ê
ê
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
ú
ú
x
y
z
T
,B =
é
ë
ê
ê
ê
ê
ê
ê
ù
û
ú
ú
ú
ú
ú
ú
r
2
2
- r
2
1
- v
2
τ
2
21
r
2
3
- r
2
1
- v
2
τ
2
31
r
2
4
- r
2
1
- v
2
τ
2
41
r
2
5
- r
2
1
- v
2
τ
2
51
(4)
其中,A 为系数矩阵;B 为测量矩阵。在 A、B 中同时
考虑误差,根据 EIV 模型
[22]
有:
(A + ε)X = B + E (5)
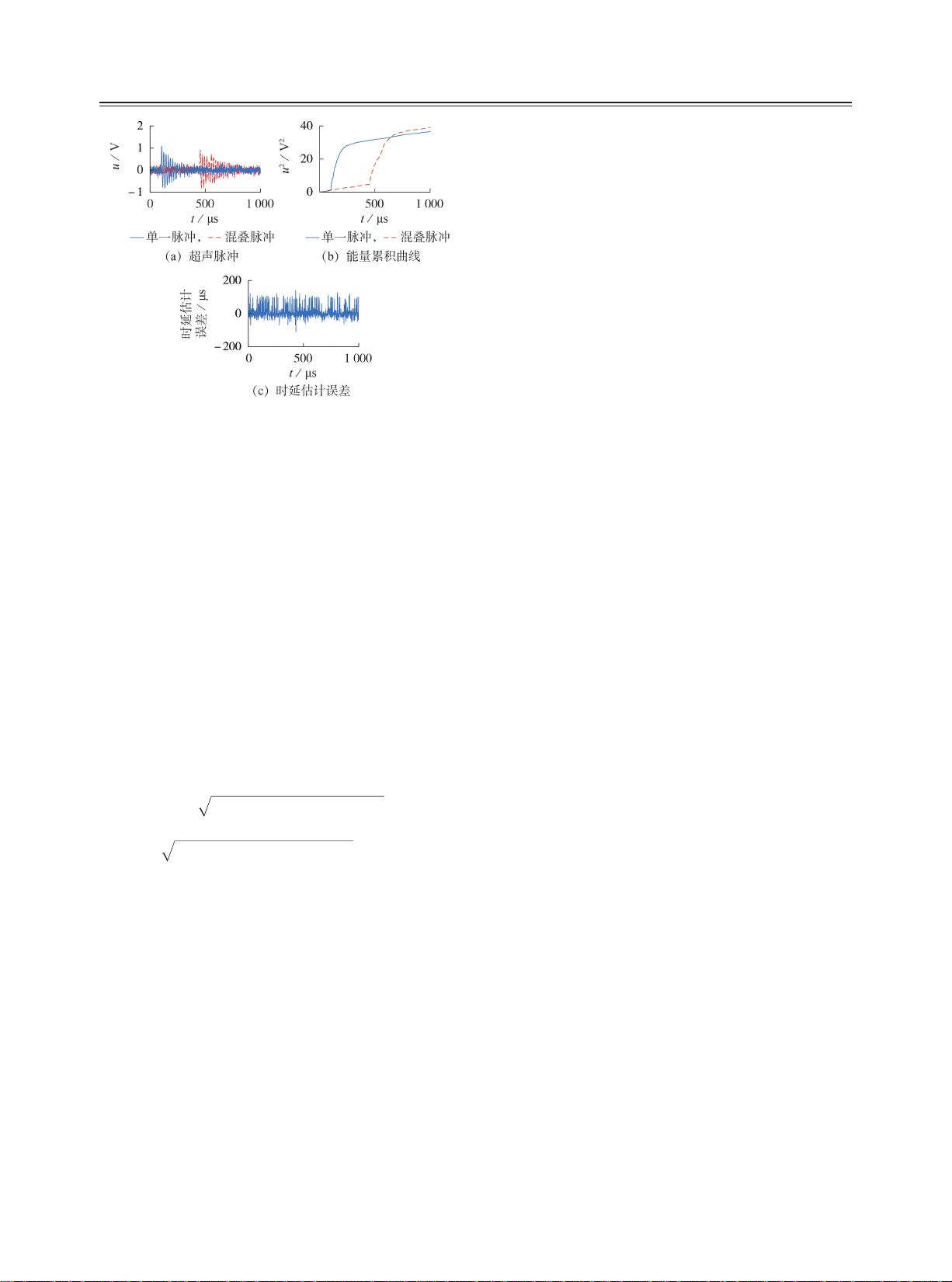
图 3 混叠脉冲及其能量累积曲线、时延估计误差
Fig.3 Aliasing pulses and their en ergy accumulation
curves and time dela y estimation error s
剩余12页未读,继续阅读

weixin_38591291
- 粉丝: 6
- 资源: 957
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


