
西南交通大学硕士研究生学位论文 第 10 页
第 3 章 自动巡线机器人姿态调整方法研究
根据上一章的分析,在该比赛特定的场地情景下,根据场地特征采用适合
机器人自身机械特性的算法让机器人实现准确行走定位是关键。
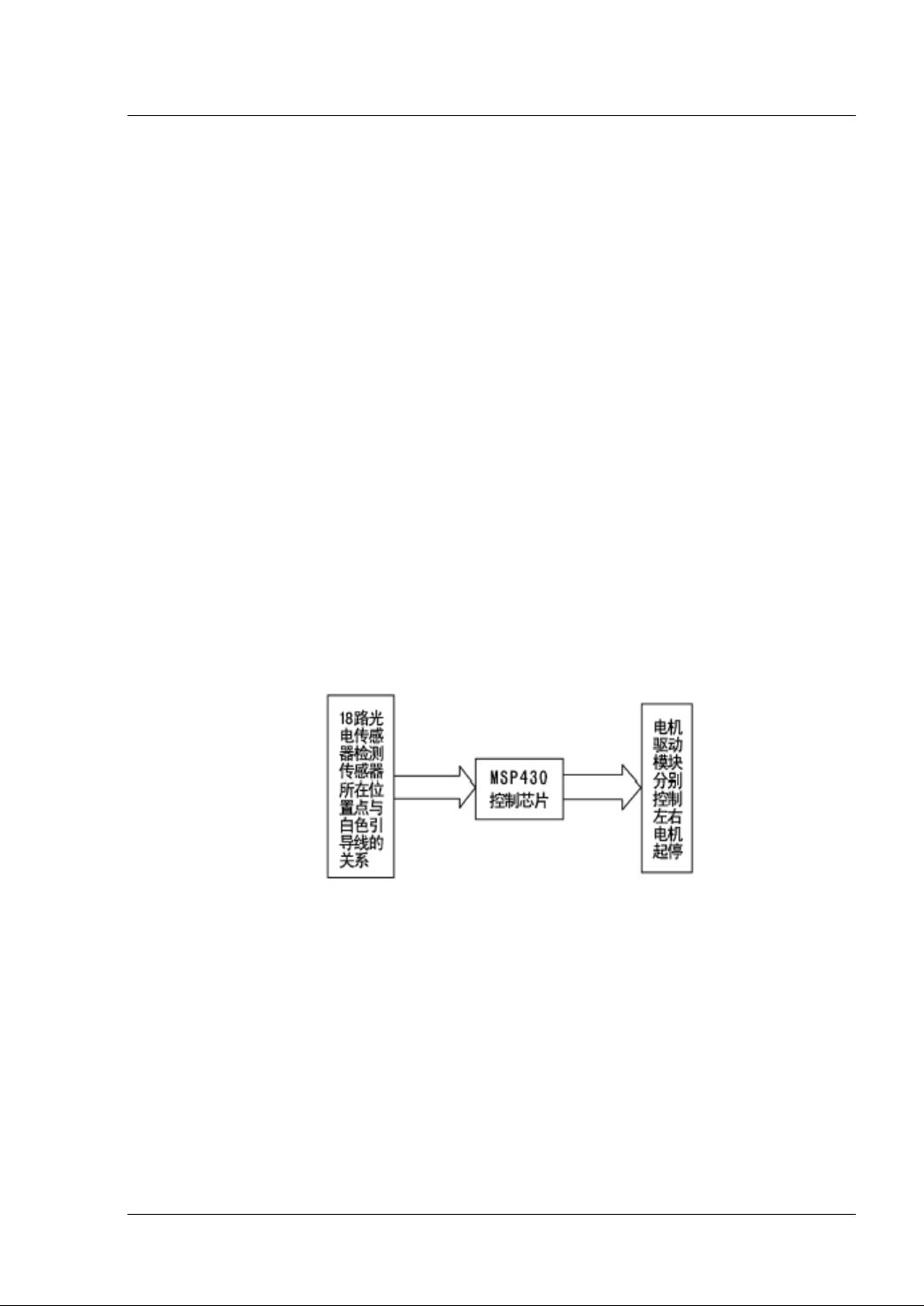
下面,首先根据机器人的机械特征,分析了通过直流电机的起或停控制机
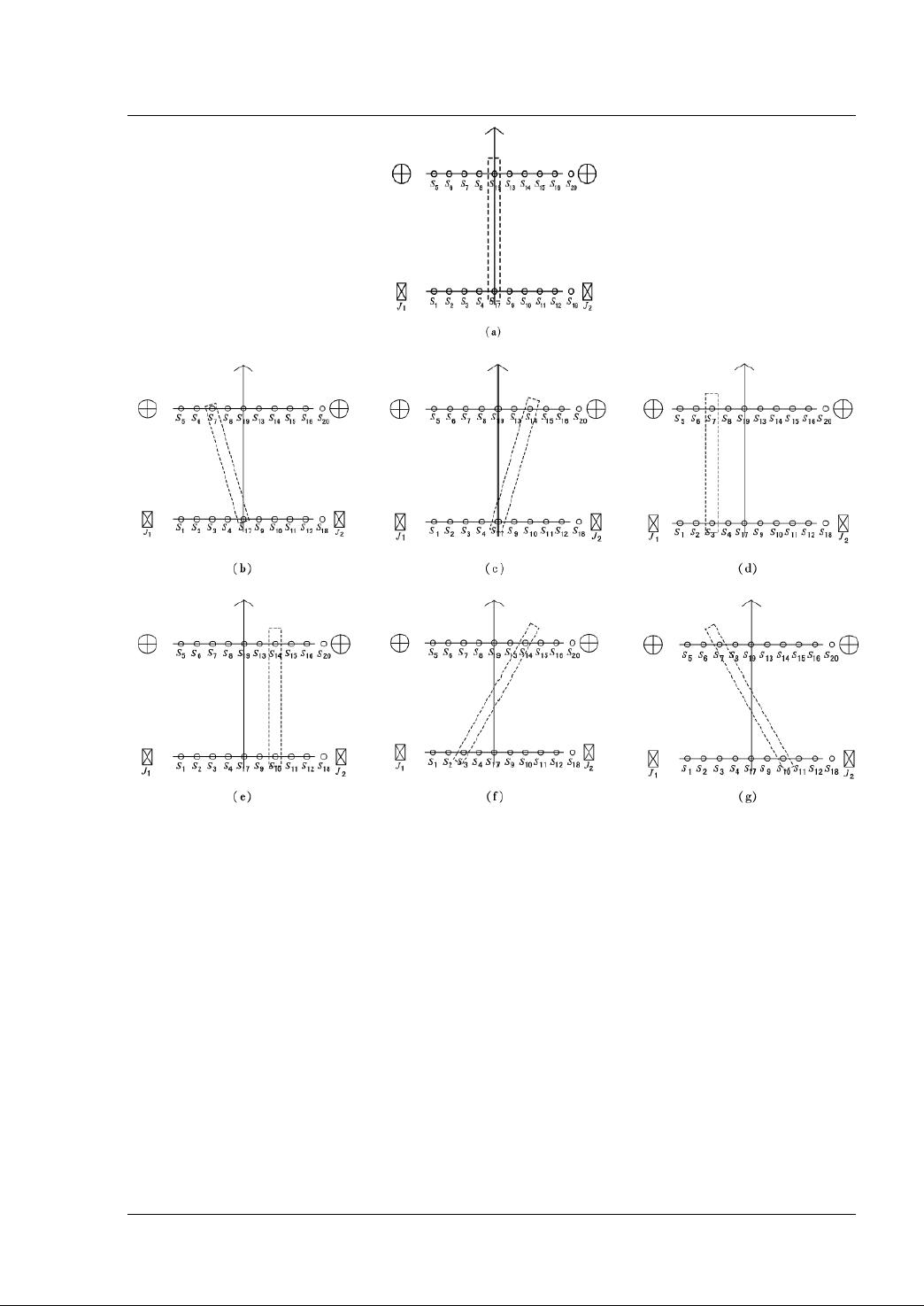
器人调整的可能性,然后把传感器检测到的机器人底盘与引导线的相对位置划
分为典型的 7 种状态,做出相应的调整策略。继而分析做出这种调整策略会校
正机器人姿态的可行性原理。最后,改进了这种一停一动的校正方法,提出了
一个新方法,用 PWM 控制左右电机的转速产生速度差,由于左右驱动轮的速度
差值小了,因此可使机器人在调整的过程中减轻晃动,并使行走加快。
3.1 总体分析
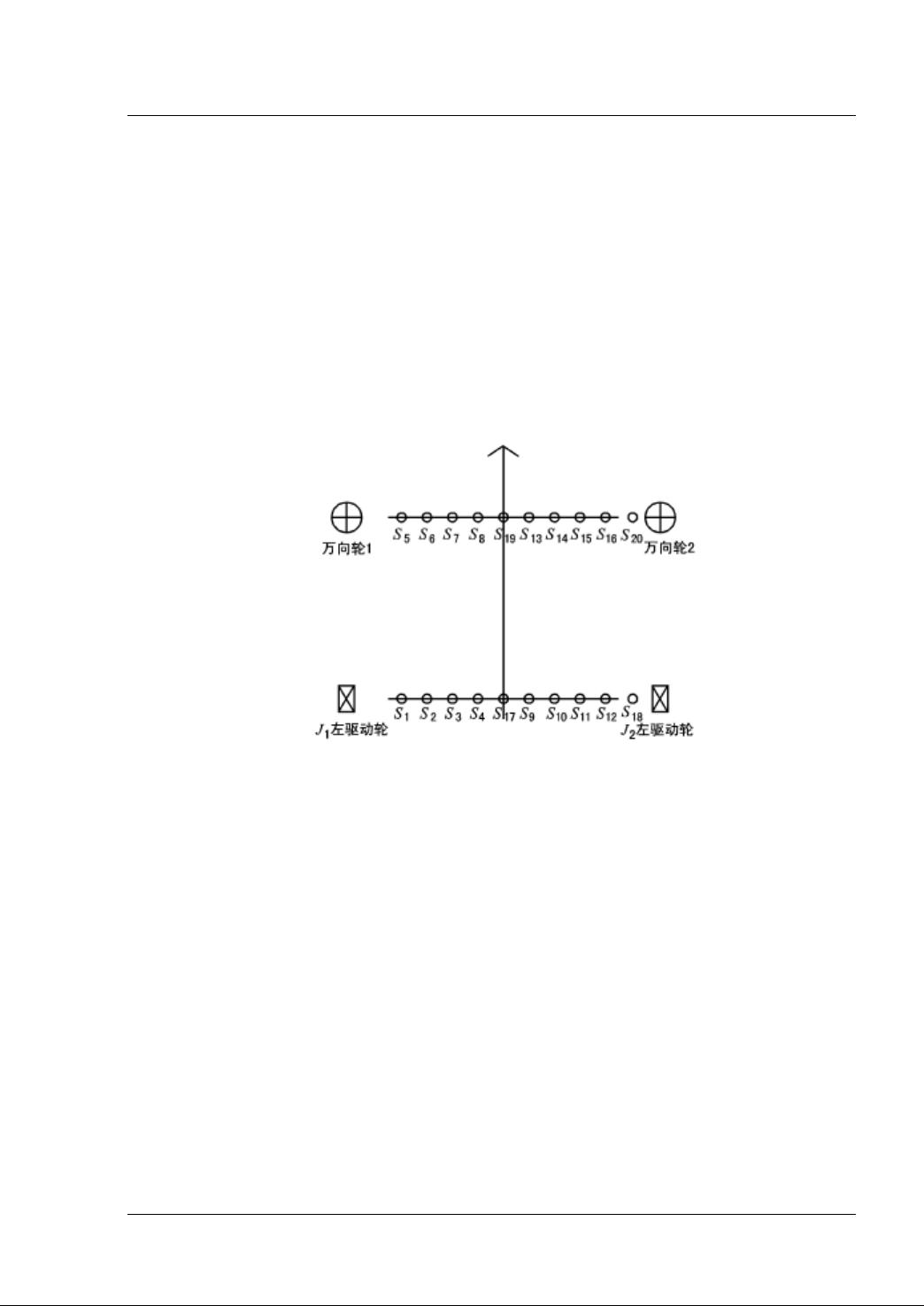
机器人底盘长 500 mm,宽 650 mm。如图 3-2 所示,后排左右轮是两个独立
的由直流电机驱动的轮子,前排放置两个万向轮。直流电机空载力矩大,可以
很好地控制所驱动的轮子起或停,万向轮在任何方向都可以实现运动,因此整
个机器人的行走方向是依靠后排两个驱动轮的起动或者停止来改变的。
图 3-1 巡线原理图
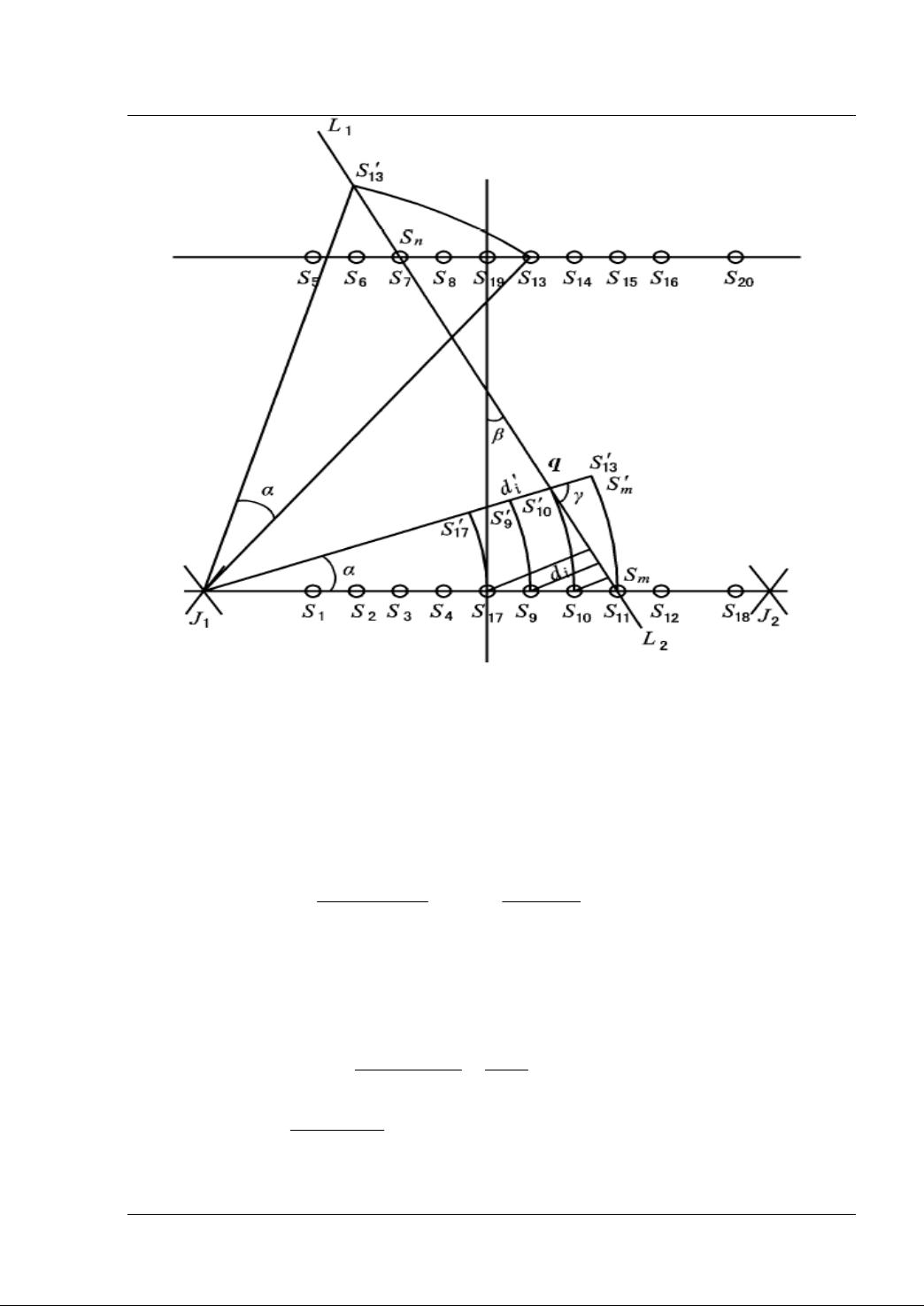
由于底盘安装精度和后排左右驱动轮子之间的转动速度不可能完全一致,
因此即使驱动板向左右驱动电机输出功率相同,也会使机器人的中心线偏离引
导线。如图 3-1 所示,机器人通过后排左右轮起或停从而调整底盘姿态,目的
是保持底盘中心线与白色引导线重合,从而让机器人沿着引导线行进到达目的
地。所采用的传感器是自制的光电传感器,当检测到的颜色是路面底色(深蓝
色)时向单片机输出高电平;当检测到的颜色是引导线颜色(白色)时向单片
机输出低电平。这些向单片机输入的高低电平实际是底盘与引导线的相对位置

剩余108页未读,继续阅读

南抖北快东卫
- 粉丝: 73
- 资源: 5588
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 电力电子系统建模与控制入门
- SQL数据库基础入门:发展历程与关键概念
- DC/DC变换器动态建模与控制方法解析
- 市***专有云IaaS服务:云主机与数据库解决方案
- 紫鸟数据魔方:跨境电商选品神器,助力爆款打造
- 电力电子技术:DC-DC变换器动态模型与控制
- 视觉与实用并重:跨境电商产品开发的六重价值策略
- VB.NET三层架构下的数据库应用程序开发
- 跨境电商产品开发:关键词策略与用户痛点挖掘
- VC-MFC数据库编程技巧与实现
- 亚马逊新品开发策略:选品与市场研究
- 数据库基础知识:从数据到Visual FoxPro应用
- 计算机专业实习经验与项目总结
- Sparkle家族轻量级加密与哈希:提升IoT设备数据安全性
- SQL数据库期末考试精选题与答案解析
- H3C规模数据融合:技术探讨与应用案例解析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


