
8
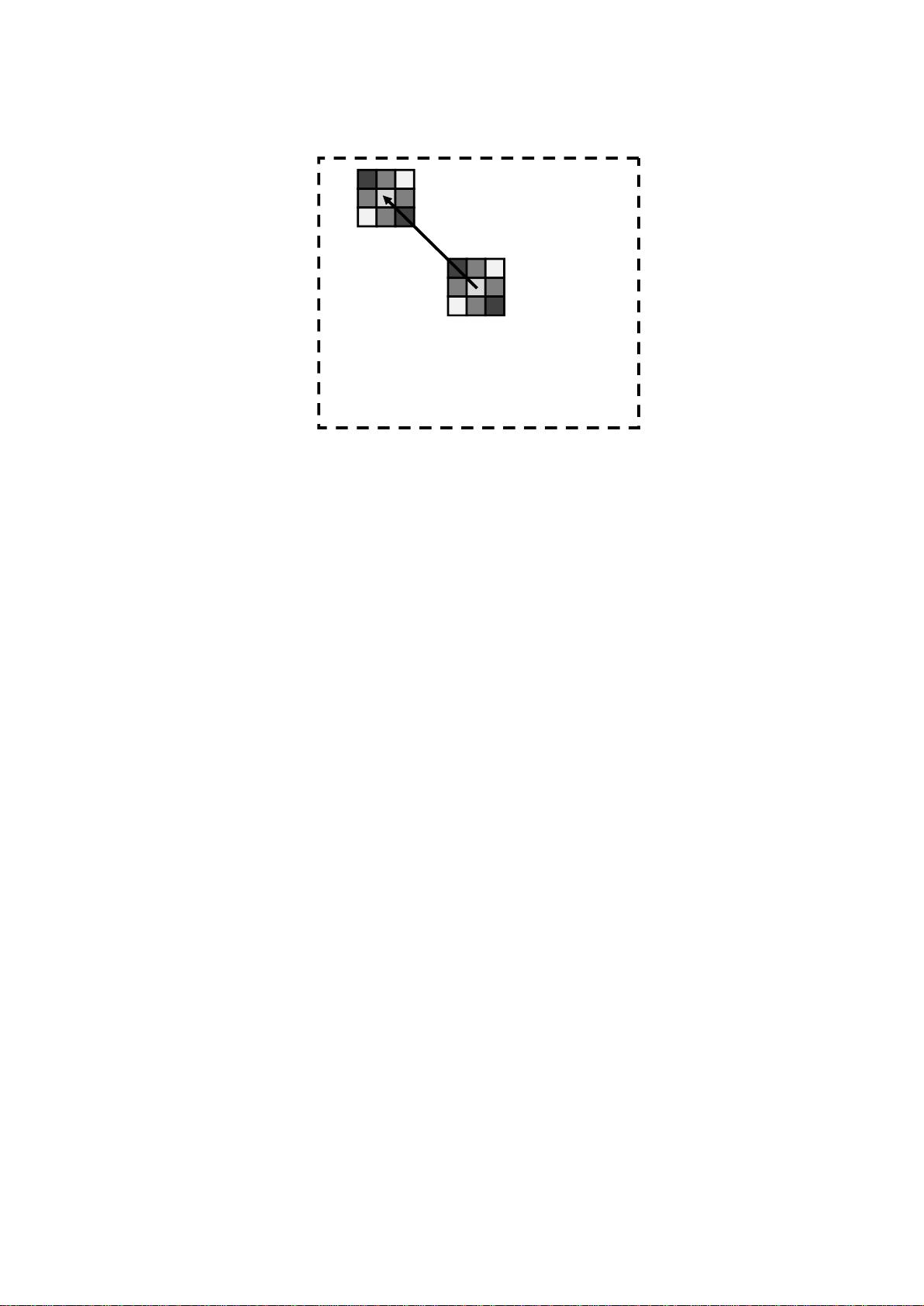
图 2 局部云块匹配原理的云导风计算
当前,卫星云图反演风场的具体方法有很多种,主要包括相关法、傅立叶相
位分析法与TCFM云导风法。
4.3.1 相关法
相关法导风是目前开发和使用最为成熟的方法,利用相关法处理常规导风云
图序列计算云迹风在美国、日本、欧洲、澳大利亚等国家和地区得到了广泛的应
用。
相关法导风的原理是通过计算目标模块的灰度矩阵与搜索范围内所有模块
的灰度矩阵的相关度或者相似程度,然后选取相关度最大的模块作为匹配模块,
通过两个模块间的像素差(即相对位置)计算风矢。按相关度的计算方式的不同
分为绝对值法、序列相似性检验法和交叉相关系数法等方法。由于这些方法仅仅
是计算相关度的公式不同,因此在计算速度和精度上没有实质的上差异。其中交
叉系数法由于数学理论依据较为充分,而被各国气象部门广泛应用。
由于相关法导风计算风速时是整像素数,对于位移不足一个像素的云团,或
者在连续的间隔小于5分钟的快速区域云图上,目标模块的位移一般小于目前静
止卫星红外云图上一个像素的尺度,就会出现“亚像素尺度位移”的问题[3,4]。由
于相对于常规导风云图而言,快速区域云图仅提高了云图的时间分辨率,而云图
的空间分辨率并没有提高,因此,此时传统的相关法在风速计算上会产生很大的
误差。虽然可以通过拟合的手段来估计匹配度的峰值,但这种方法不仅在相关法
计算量已经很大的基础上,进一步增加计算量,且并不能有效地解决问题。
4.3.2 傅立叶相位分析法
王振会[5]教授在研究1 分钟时间分辨率区域云图导风中的“亚像素尺度位移”
问题时,创新性地提出了傅立叶相位分析技术,对示踪云进行频域波谱分析,由
谐波的相位变化计算波速,最后由平均波速计算云迹风,经用美国GOES卫星1
分钟间隔云图进行探索性试验表明,这一方法不仅可以追踪位移小于一个像素的
目标模块
匹配模块
搜索区域

剩余40页未读,继续阅读

普通网友
- 粉丝: 12w+
- 资源: 9195
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


