立体视觉算法与应用教程
需积分: 9 70 浏览量
更新于2024-07-21
收藏 51.44MB PDF 举报
"Stereo Vision 教程 - 由 Stefano Mattoccia 提供,涵盖了算法与应用,包括最新的 3D 应用、FPGA 处理的立体相机以及多种立体匹配方法的实验结果"
立体视觉(Stereo Vision)是一种通过两台或更多相机模拟人眼观察场景来获取三维信息的技术。在计算机视觉领域,它被广泛应用于自动驾驶、机器人导航、3D重建和物体识别等。教程作者 Stefano Mattoccia 是意大利博洛尼亚大学计算机科学系的教授,他在该领域有深入的研究。
教程内容可能包括以下关键知识点:
1. **基本概念**:介绍立体视觉的基本原理,如视差、基线、对应关系、深度图等,这些都是理解立体视觉系统工作方式的基础。
2. **立体匹配**:这是立体视觉的核心问题,涉及到寻找两个不同视角图像中的对应像素。教程可能涵盖了不同的匹配算法,如 SAD(Sum of Absolute Differences)、SAD、SSD(Sum of Squared Differences)、BM(Block Matching)、半全局匹配(Semi-Global Matching, SGM)等。
3. **FPGA处理的立体相机**:FPGA(Field-Programmable Gate Array)在实时立体视觉系统中起着重要作用,因为它能提供高速并行计算能力。这部分可能解释了如何利用FPGA优化立体匹配过程。
4. **实验结果**:教程可能包含了作者团队的最新研究成果,比如 "Linear stereo matching" (ICCV 2011)、Min et al.'s algorithm (ICCV 2011)、"Fast Segmentation driven (FSD)" (IC3D) algorithm 和 SGM 的实验比较。
5. **GPU加速**:Fast Bilateral Stereo (FBS) 算法在 GPU 上的实现,这展示了如何利用图形处理器的并行计算能力提高匹配效率。
6. **应用**:除了理论和算法,教程还可能探讨了立体视觉在实际中的应用,如3D重建、机器人导航等,并添加了新的3D应用场景。
7. **软件实现**:提供了 Linux 和 Windows 下 Fast Bilateral Stereo 算法的实现,以及 VisionSt 立体相机的使用说明。
8. **更新内容**:随着时间的推移,教程不断更新,添加了新的算法、实验结果和应用,确保内容与时俱进。
通过这个教程,学习者可以全面了解立体视觉的各个方面,包括理论、算法实现以及实际应用,为深入研究或开发立体视觉系统打下坚实基础。对于希望进一步阅读的学者,可以访问作者提供的最新版本文档链接以获取最详尽的信息。
Stefano Mattoccia
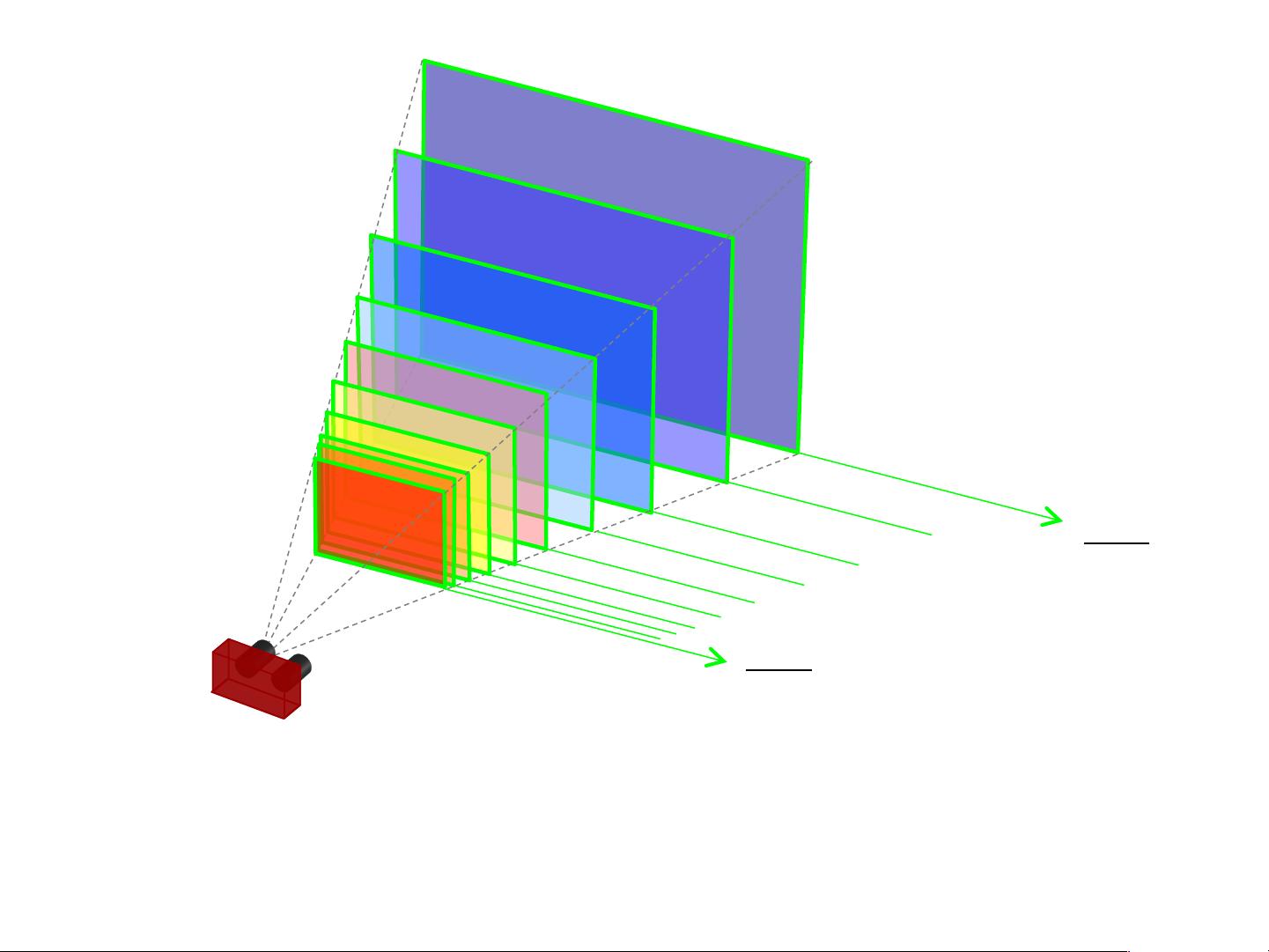
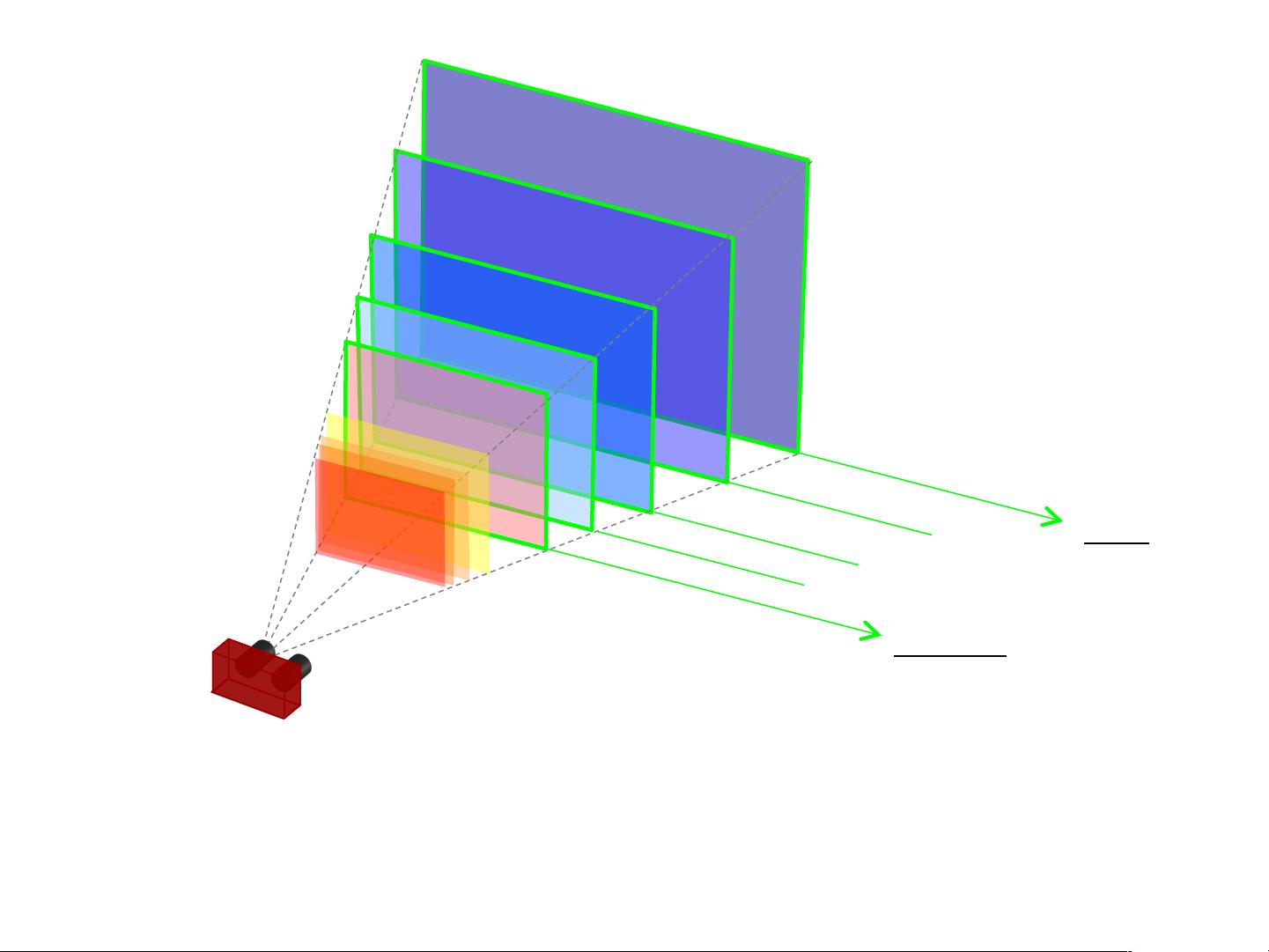
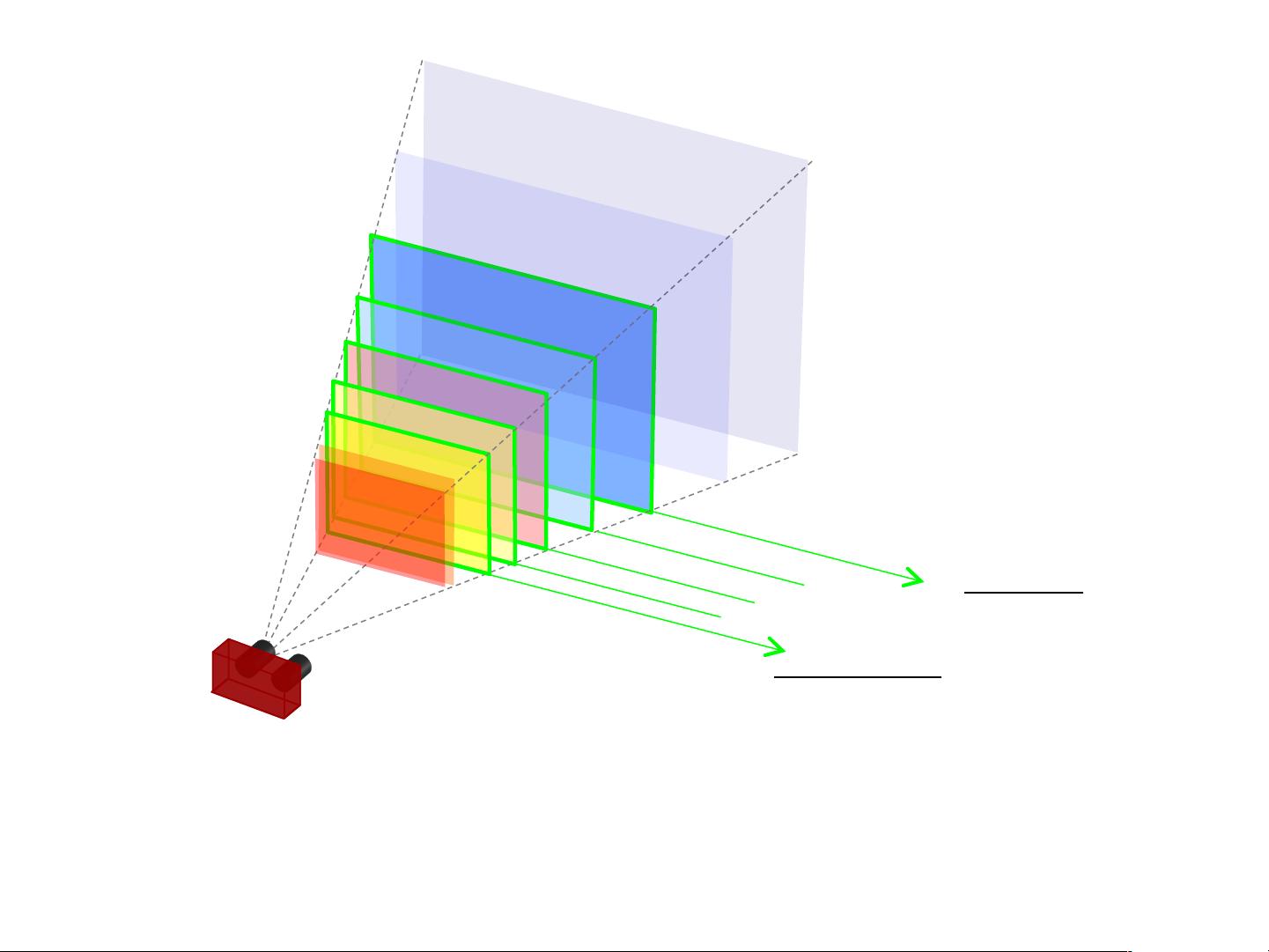
• Depth measured by a stereo vision system is discretized
into parallel planes (one for each disparity value)
• A better (virtual) discretization can be achieved with
subpixel techniques (see Disparity Refinements)
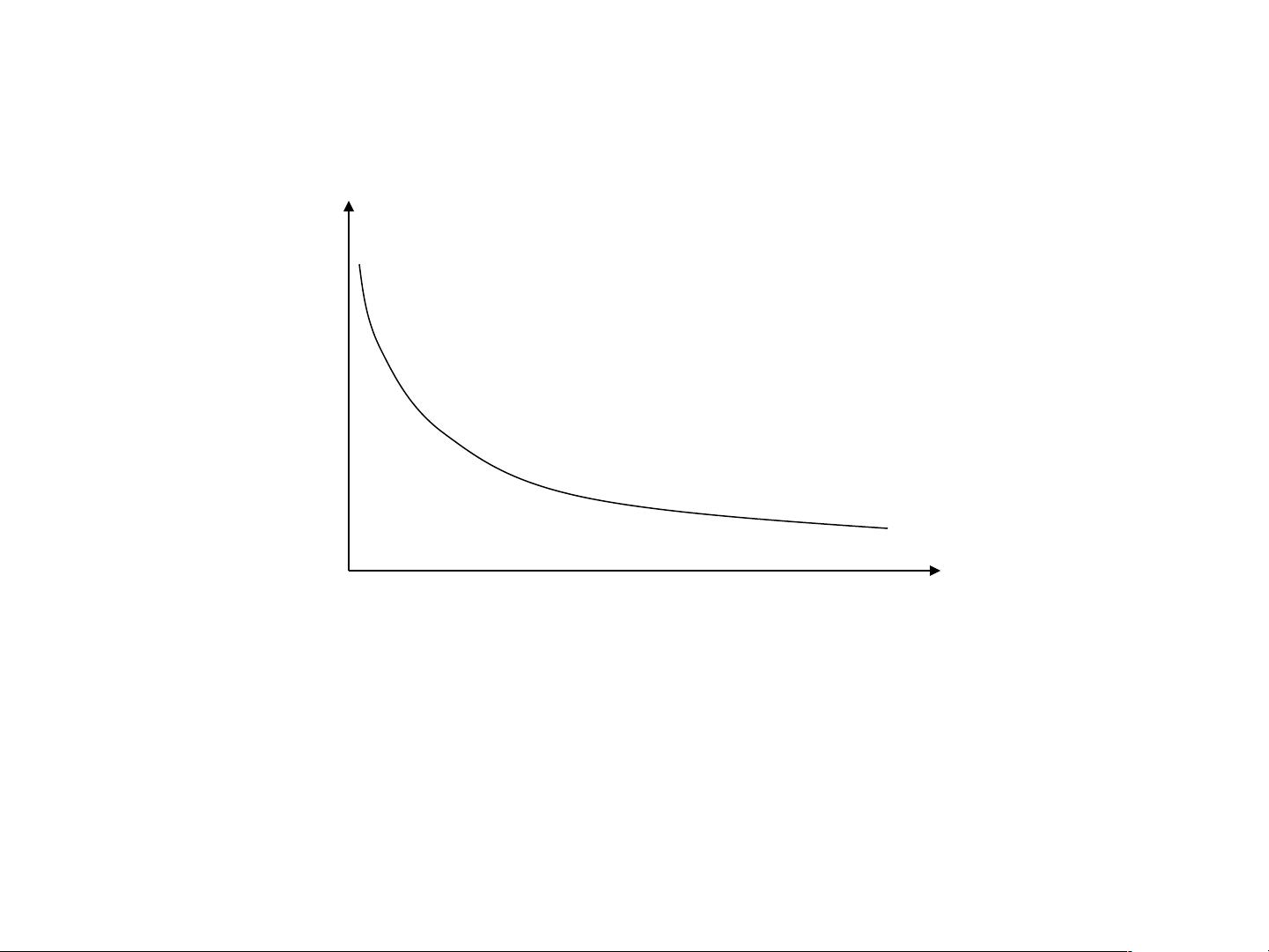
min
d
fb ⋅
max
d
fb ⋅

剩余207页未读,继续阅读
2011-11-21 上传
2012-04-25 上传
2023-06-01 上传
2023-05-12 上传
2023-10-31 上传
2023-09-13 上传
2023-06-08 上传
2023-05-28 上传
2023-05-26 上传

zhaotwins
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
