SDNandMemory TM嵌入式闪存规格:小体积,大容量,高速物联网应用
需积分: 50 55 浏览量
更新于2024-07-17
收藏 1.12MB PDF 举报
CSSDNandMemory TM是一款专为穿戴设备和物联网应用设计的高性能、小型化的SD NAND闪存解决方案。这款产品规格版本为V2.0,发布于2018年12月14日,相较于原始草案(V1.0)在2017年11月20日的基础上增加了更多详细的产品信息和特性。
该产品的主要特点包括:
1. **集成度高**:作为基于NAND闪存和SD控制器的嵌入式存储,CSSDNandMemory TM集成了控制器功能,使得硬件设计更加简洁,减少了外部接口的需求。
2. **小体积与大容量**:由于其紧凑的设计,CSSDNandMemory非常适合在尺寸受限的设备上提供大量的存储空间,如智能手表、健康追踪器等,满足物联网设备对于存储容量的需求。
3. **高速性能**:文档详述了两种工作模式下的数据传输特性,包括默认模式下的DC Characteristics(直流特性)和高速模式下的AC Characteristics(交流特性),确保了快速的数据读写能力。
4. **初始化与控制**:SDNand寄存器提供了对擦除、编程和初始化过程的精确控制,包括OCR(Overwrite Command Register)、CID(Command Interface Data Register)、CSD(Card Specific Data Register)等,支持灵活的设备管理和配置。
5. **电源管理**:产品支持优化的电源管理模式,包括PowerUp时间和电源供应的上升时间,确保在低功耗状态下也能迅速启动并达到稳定的工作状态。
6. **参考设计**:文档还提供了参考设计,为开发者在实际应用中如何利用CSSDNandMemory TM进行系统集成和优化提供了指导。
通过CSSDNandMemory TM,设计者可以轻松构建具有高效存储性能、小型化优势的智能设备,满足现代物联网设备对于轻巧、耐用且数据密集型应用的需求。这款产品适合于那些追求创新、低成本和易用性的电子工程师和产品经理。
CS SD Nand Memory
TM
- 2 -
• Switch function command supports High-Speed, eCommerce, and future functions
• Correction of memory field errors
• Content Protection Mechanism - Complies with highest security of SDMI standard.
• Password Protection of SD Nand (CMD42 - LOCK_UNLOCK)
• Write Protect feature using mechanical switch
• Built-in write protection features (permanent and temporary)
• Application specific commands
• Comfortable erase mechanism
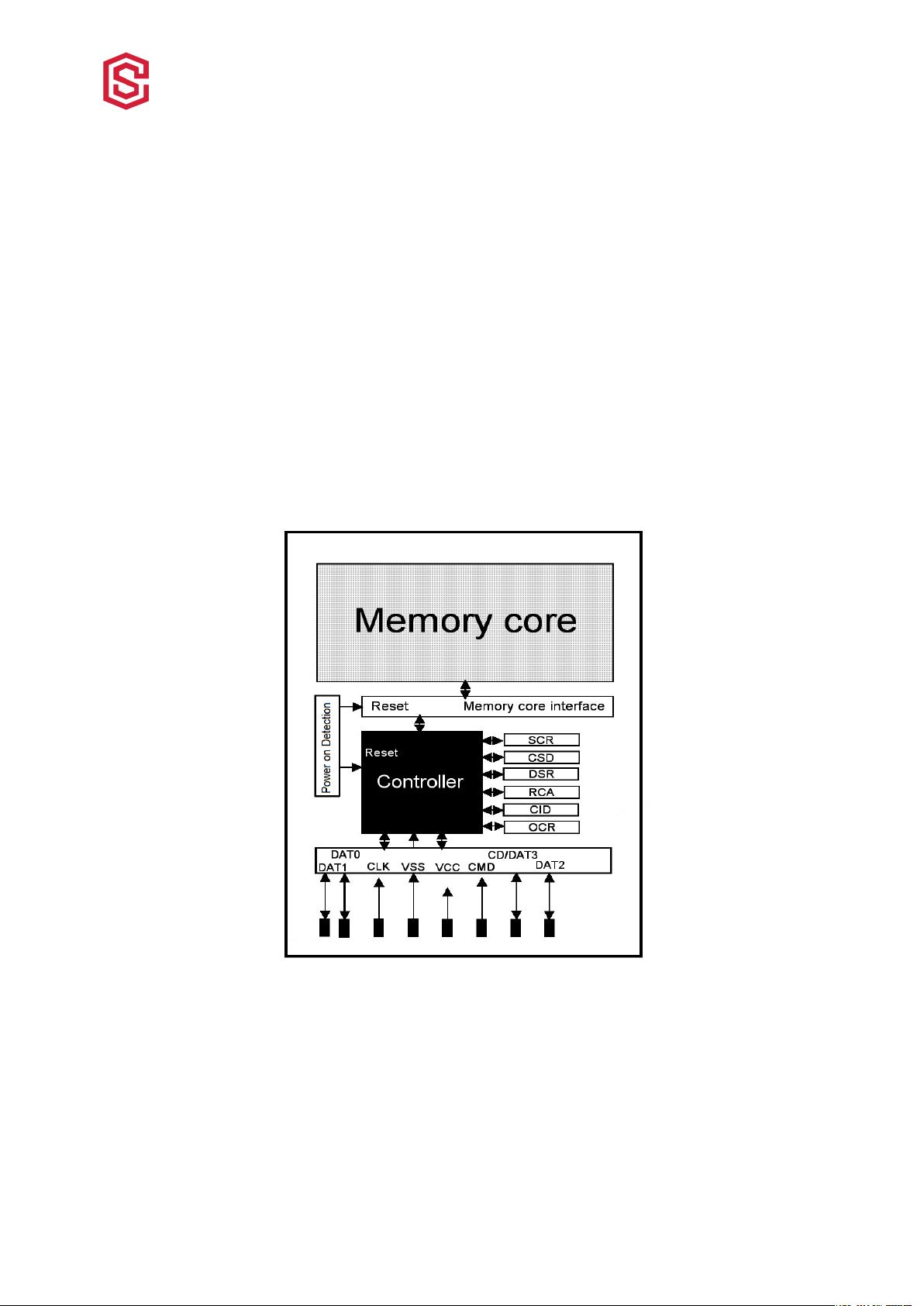
1.4#Block#Diagram#
剩余24页未读,继续阅读
2019-09-14 上传
2023-06-11 上传
2023-05-10 上传
2023-05-25 上传
2023-05-14 上传
2024-03-07 上传
2023-03-31 上传
2023-05-24 上传

羊与狼的传说
- 粉丝: 130
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
