
Anti-Disturbance Control for Markovian Jump System via
DOB Output Feedback Control
∗
Xiuming Yao
National Key Laboratory on Aircraft Control Technology
Beihang University
xiumingyao@gmail.com
Lei Guo
National Key Laboratory on Aircraft Control Technology
Beihang University
lguo66@aliyun.com
Abstract—This note studies the problems of the composite
disturbance-observer-based (DOB) output feedback control and
passive control for Markovian jump systems with nonlinearity
and multiple disturbances. The purpose of the problem ad-
dressed is to design a DOB output feedback controller such
that the resulting composite system is passive and different
types of the disturbances can be attenuated and rejected. The
characterization of the gains of the desired disturbance observer
and the matrices of the expected output feedback controller
are derived based on the solution to a convex optimization
problem that can be easily solved by standard numerical
software. Finally, a simulation example is employed to show
the effectiveness of the composite control scheme proposed in
this paper.
Index Terms—Disturbance observer; Markovian jump non-
linear systems; passive control; multiple disturbances.
I. INTRODUCTION
Due to increasing demands for high performance of the
complex control systems, the anti-disturbance control has
been an eternal topic since the beginning of the control
theory. And now, it has attracted extensive interests and
attention from both academia and engineer. Several elegant
schemes have been proposed to combat the above problem,
such as nonlinear DOBC theory, nonlinear regulation theory,
nonlinear H
∞
theory and so on. A practically motivated way
of handling the rejection of disturbance problems is nonlinear
DOBC approach [1–7], by which the disturbance with some
known information can be compensated completely. Notice
that, the control scheme in the above mentioned literature,
are DOB state-feedback, however, when the states or the
estimation of the states are not available, such control scheme
does not work any more. Consequently, DOB output feedback
control strategy can be adopted while encountering the above
situation.
In this paper, we are motivated to deal with the DOB
output feedback control problem for Markovian jump linear
∗
This work was supported in part by the Major State Basic Research
Development Program of China (973 Program) under Grant 2012CB720003,
the National Natural Science Foundation of China under Grants 61203041,
61127007, 61121003 and 91016004, the Chinese National Post-doctor Sci-
ence Foundation under Grants 2011M500217 and 2012T50036, and the Doc-
toral Fund of Ministry of Education of China under Grant 20120036120013.
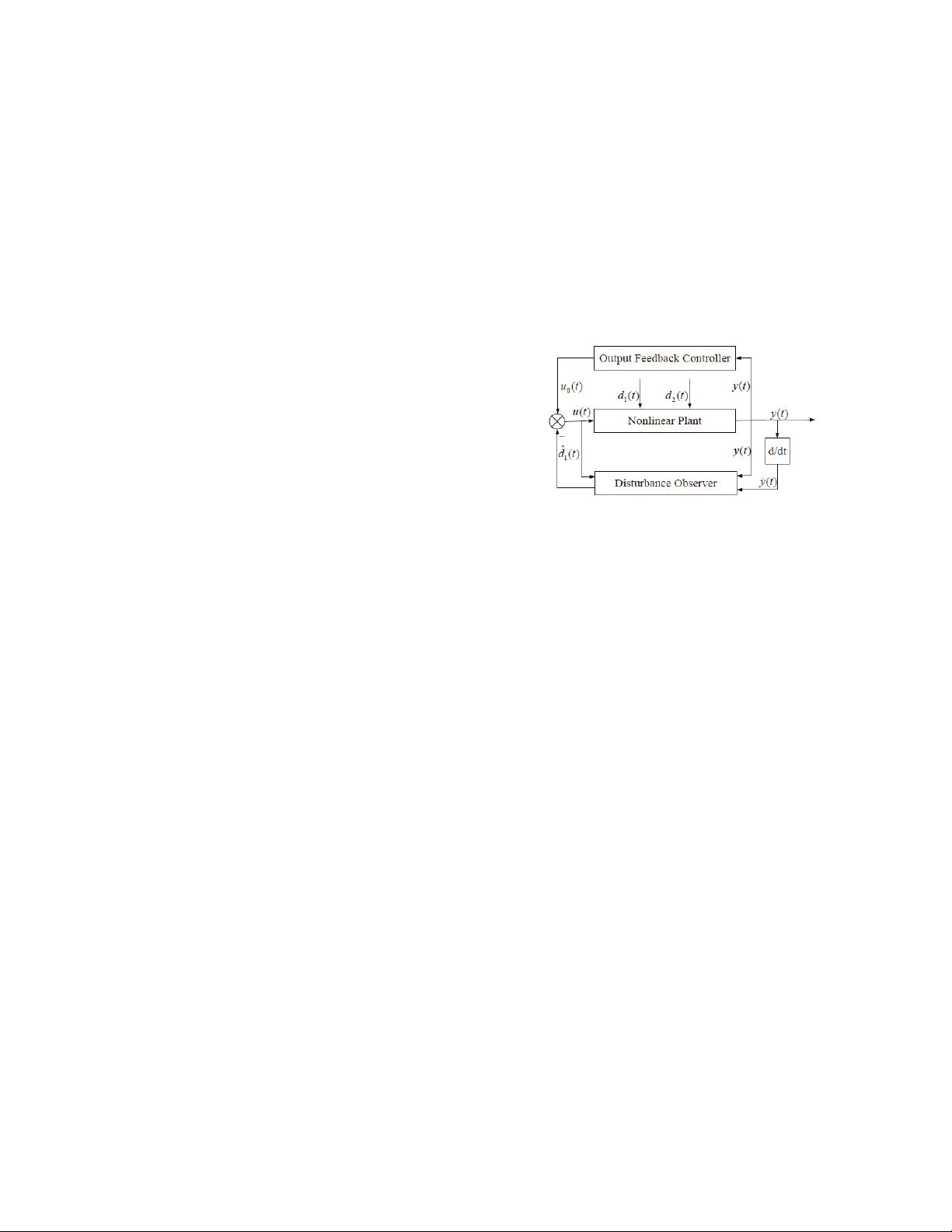
Fig. 1. The DOB output feedback control problem with multiple distur-
bances
systems (MJLs) with multiple disturbances and nonlinearity.
The main contributions of this paper can be highlighted as
follows:
1) A new hierarchical/composite control methodology,
which is DOBC plus passive control, for the controlled
plant with multiple disturbances is proposed.
2) A new structure of the nonlinear disturbance observer
is constructed based on the information of the control
input, measurement output and the derivative of the
measurement output.
3) DOB output feedback controller is proposed to take
place of DOB state feedback controller, which is under
the assumption that the system states or the estimation
of them are available.
4) The conditions of the existence of the above com-
posite DOB output feedback controllers and passive
controllers are proposed for MJLs with nonlinearity,
which have not been presented yet, up to now.
II. P
ROBLEM FORMULATION AND PRELIMINARIES
The disturbance-observer-based output feedback control
problem subject to multiple disturbances is shown in Figure
1. In this figure, the physical plant is modeled as Markovian
jump nonlinear systems, and the disturbance-observer-based
output feedback controller is applied. In this section, we
model the whole problem mathematically.
A. Nonlinear plant
Fix a probability space (Ω, ℱ, 𝒫), where Ω is the sample
space, ℱ is the 𝜎-algebra of subsets of the sample space and
978-1-4799-5825-2/14/$31.00 ©2014 IEEE
Proceeding of the 11th World Congress on Intelligent Control and Automation
Shenyang, China, June 29 - July 4 2014
1124
下载后可阅读完整内容,剩余5页未读,立即下载

weixin_38675797
- 粉丝: 3
- 资源: 968
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


