网络诱导延迟与数据包丢失下奇异马尔可夫跳变系统非脆弱H∞输出跟踪控制设计
194 浏览量
更新于2024-07-14
收藏 330KB PDF 举报
本文探讨的是在网络环境中具有不确定性、时变延迟和数据包丢失的奇异马尔可夫跳跃时滞系统中的非脆弱H1输出跟踪控制问题。研究的焦点在于设计一种针对系统状态的模式依赖型反馈控制器,该控制器能够在存在控制器增益扰动和有限的模式转换速率情况下,确保闭环网络控制系统输出能够精确追踪给定参考系统的输出,同时保持所需的H1输出跟踪性能。
首先,作者考虑的系统是奇异马尔可夫跳跃模型,这种模型的特点在于参数的随机性以及状态的非连续性,这增加了控制设计的复杂性。网络引入了额外的挑战,如信号传输延迟,这可能导致系统的实时性和稳定性受到威胁。数据包丢失进一步加剧了通信链路的不可靠性,使得控制算法必须具备鲁棒性,即使在数据不完整的情况下也能提供有效的控制性能。
本文的核心贡献是提出了一种新颖的控制策略,即非脆弱H1输出跟踪控制。非脆弱控制旨在确保系统在面对不确定性的同时,仍然能够维持预定的性能标准。通过构建一个多重随机Lyapunov-Krasovskii函数,研究人员能够设计出既能处理时滞效应又能处理数据丢失影响的控制器。这个函数不仅考虑了系统的动态特性,还包含了网络效应和不确定性的影响,从而使得控制设计更为全面和精确。
为了实现这一目标,文章可能涉及到以下步骤:
1. 建立系统的数学模型,包括状态方程、输出方程以及不确定性描述。
2. 设计状态反馈控制器的形式,通常会采用线性或近似线性化的方法。
3. 利用Lyapunov稳定性理论和小信号分析,确定控制器参数,确保闭环系统的稳定性。
4. 针对数据包丢失情况,可能采用概率模型或者统计方法来量化其对系统性能的影响,并在控制器设计中予以补偿。
5. 提出控制器的非脆弱性条件,即在控制器增益变化和模式转换速率限制下,输出跟踪性能依然能够满足预设的H1范数界限。
最后,该研究可能提供了数值仿真结果或者实验验证,以展示所设计控制器的有效性和鲁棒性。这篇研究对于理解和解决实际工业过程中的网络控制系统设计问题,特别是在存在时滞和数据丢包的苛刻环境下,具有重要的理论价值和应用前景。
where x
r
ðtÞ2R
m
is the reference state, vð tÞ2R
k
is the
energy bounded reference input, reference signal y
r
(t) and
output y(t) have the same dimension. The matrix E
r
2 R
m3m
may be singular and it is assumed that
rank(E
r
) 5 r
2
m. A
ri
, A
dri
, B
ri
, C
ri
are constant matrices
with appropriate dimensions and the reference system is
assumed to be stable.
Remark 1
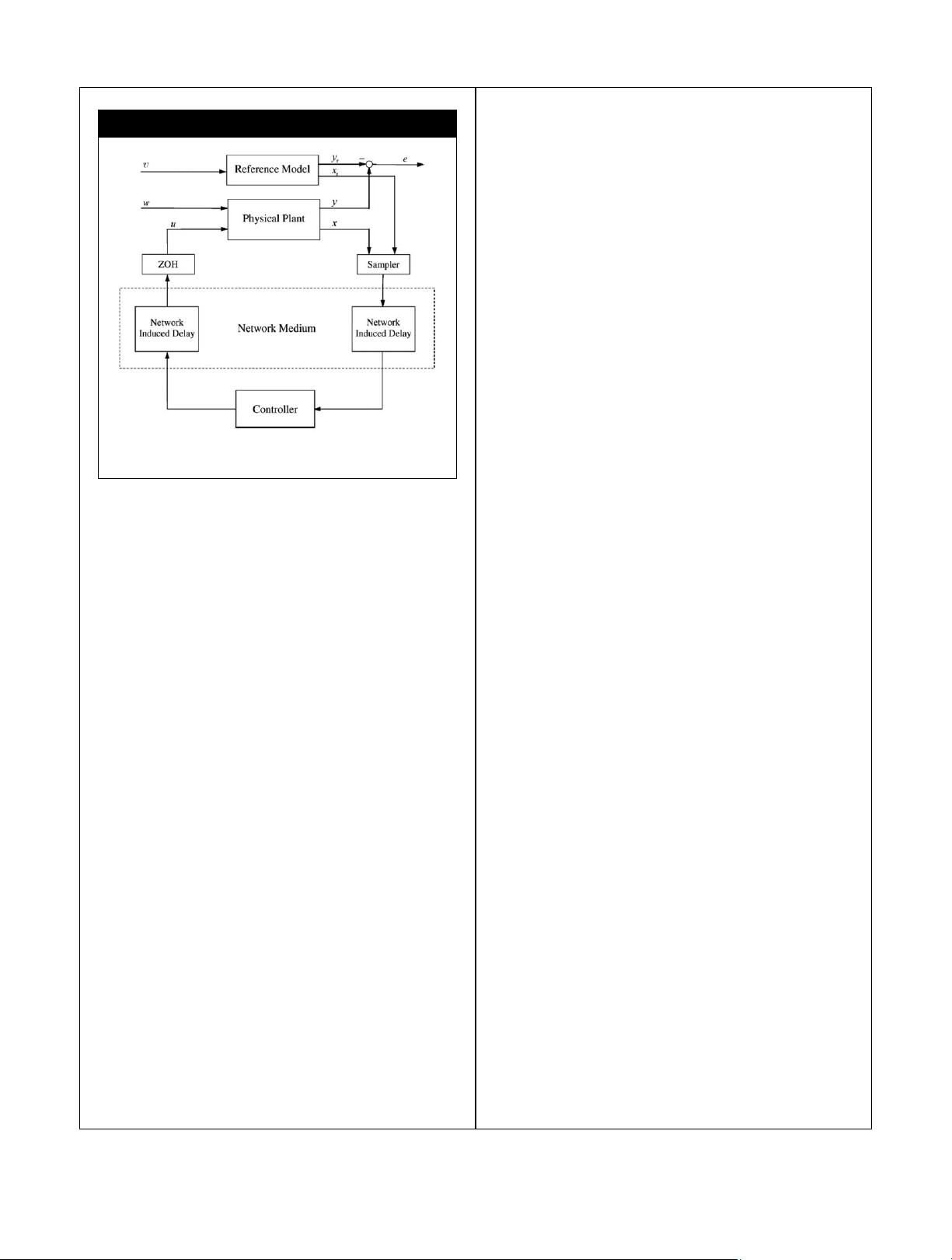
The typical networked output tracking control system
depicted in Figure 1 stems from [5], both x(t) and x
r
(t)
are online measurable, and the measurements of x(t) and
x
r
(t) are transmitted with a single packet independently.
Similar with [5], we also assume that the sensor and
sampler are clock driven, the controller and zero-order
hold (ZOH) are event driven. The sampling period is
assumed to be a positive real constant h, the updating
instant of the ZOH is shown as t
k
, and suppose the
updating signal at the instant t
k
has experienced signal
transmission delay g
k
, which including the delay from
the sampler to the controller and the delay from the
controller to the ZOH.
Noting the aforementioned updating instant t
k
and
network-induced delay g
k
, we consider the following state-
feedback controller with gain variations
uðt
k
Þ5ðK
1i
1DK
1i
Þxðt
k
2g
k
Þ1ðK
2i
1DK
2i
Þx
r
ðt
k
2g
k
Þ; (9)
where K
1i
and K
2i
are the state-feedback control gains to
be designed, DK
1i
and DK
2i
represent the gain variations
with the following form:
DK
1i
5M
4i
W
i
ðrÞN
2i
; DK
2i
5M
5i
F
i
ðrÞN
3i
; (10)
where M
4i
, M
5i
, N
2i
, N
3i
are known constant matrices with
compatible dimensions, and F
i
(r) are the uncertain matri-
ces satisfying
F
i
ðrÞ
T
F
i
ðrÞI; 8 i 2 S; (11)
where r 僆 H, and H is a compact set in R. Furthermore, it
is assumed that given any matrix F
i
: F
T
i
F
i
I, there exists
a r 僆 H such that F
i
5 F
i
(r).
Considering the behavior of the ZOH, we get that
uðtÞ5ðK
1i
1DK
1i
Þxðt
k
2g
k
Þ1ðK
2i
1DK
2i
Þx
r
ðt
k
2g
k
Þ; t
k
t < t
k11
;
(12)
where t
k 1 1
is the next updating instant of the ZOH after
t
k
.
0 g
m
g
k
g
M
; (13)
g
m
, g
M
denotes the lower and upper delay bounds,
respectively. Moreover, at the updating instant t
k
, the
number of accumulated data packet dropouts as the last
updating instant t
k21
is denoted as d
k
, which satisfies
0 d
k
d: (14)
Thus, according to the aforesaid presentation, we have
t
k11
2t
k
5ðd
k11
11Þh1g
k11
2g
k
: (15)
Now, absorbing the discrete signal into the continuous-
time framework. To this end, we represent the time instant
t
k
2g
k
in (12) as
t
k
2g
k
5t2g
m
2gðtÞ; (16)
where gðtÞ 5 t2t
k
1ðg
k
2g
m
Þ; t
k
t < t
k11
. Therefore, from
(15), we have
0 gðtÞj; (17)
where j 5 g
M
2g
m
1ð
d11Þh. Furthermore, we assume g(t)
satisfy the following condition:
0 <
_
gðtÞg: (18)
Consequently, state-feedback controller (12) can be
written as
uðtÞ5ðK
1i
1DK
1i
Þxðt2g
m
2gðtÞÞ1ðK
2i
1DK
2i
Þx
r
ðt2g
m
2gðtÞÞ:
(19)
Denoting e(t) 5 y(t) 2 y
r
(t), from (1), (8), and (19), we
get the following augmented closed-loop system:
~
E
_
nðtÞ5
~
A
i
nðtÞ1
~
A
di
nðt2sðtÞÞ1
~
B
i
nðt2g
m
2gðtÞÞ1
~
E
i
-ðtÞ;
eðtÞ5
~
C
i
nðtÞ1
~
D
i
nðt2g
m
2gðtÞÞ;
nðtÞ5uðtÞ; t 2½2s; 0;
8
>
>
<
>
>
:
(20)
FIGURE 1
Networked output tracking control system.
COMPLEXITY 399Q 2015 Wiley Periodicals, Inc.
DOI 10.1002/cplx
剩余15页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-03-13 上传
2021-03-25 上传
2021-03-12 上传
2021-03-04 上传
2021-03-14 上传
点击了解资源详情

weixin_38617851
- 粉丝: 4
- 资源: 923
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
