
基于基于STM32的可遥控智能跟随小车的设计与实现的可遥控智能跟随小车的设计与实现
1、引言智能小车是一个集自动控制、环境监测、无线遥控等多功能于一体的综合系统,人们习惯称其为移动轮
式机器人,目前以单片机为的移动机器人还存在处理数据局限、控制不稳定等不足之处,国内市场暂时还没有
出现具有真正意义的跟随性智能载物小车。本设计基于单片机的智能小车测距模块、红外遥控模块和小车智能
控制模块,通过软硬件设计调试,实现了小车的自动跟随状态。主要利用超声波测距模块实现小车与目标之间
距离的实时检测,当两者距离较近小车就“缓慢跟随”,一旦测得距离较远,小车将“加快脚步”,直到追上目标,
并且小车可以跟随目标一起转弯,不会“跟丢”。2、硬件设计2.1、系统总体设计为实现小车智能跟随,采用了
超声波测距
1、引言、引言
智能小车是一个集自动控制、环境监测、无线遥控等多功能于一体的综合系统,人们习惯称其为移动轮式机器人,目前
以单片机为的移动机器人还存在处理数据局限、控制不稳定等不足之处,国内市场暂时还没有出现具有真正意义的跟随性智能
载物小车。本设计基于单片机的智能小车测距模块、红外遥控模块和小车智能控制模块,通过软硬件设计调试,实现了小车的
自动跟随状态。主要利用超声波测距模块实现小车与目标之间距离的实时检测,当两者距离较近小车就“缓慢跟随”,一旦测得
距离较远,小车将“加快脚步”,直到追上目标,并且小车可以跟随目标一起转弯,不会“跟丢”。
2、硬件设计、硬件设计
2..1、系统总体设计、系统总体设计
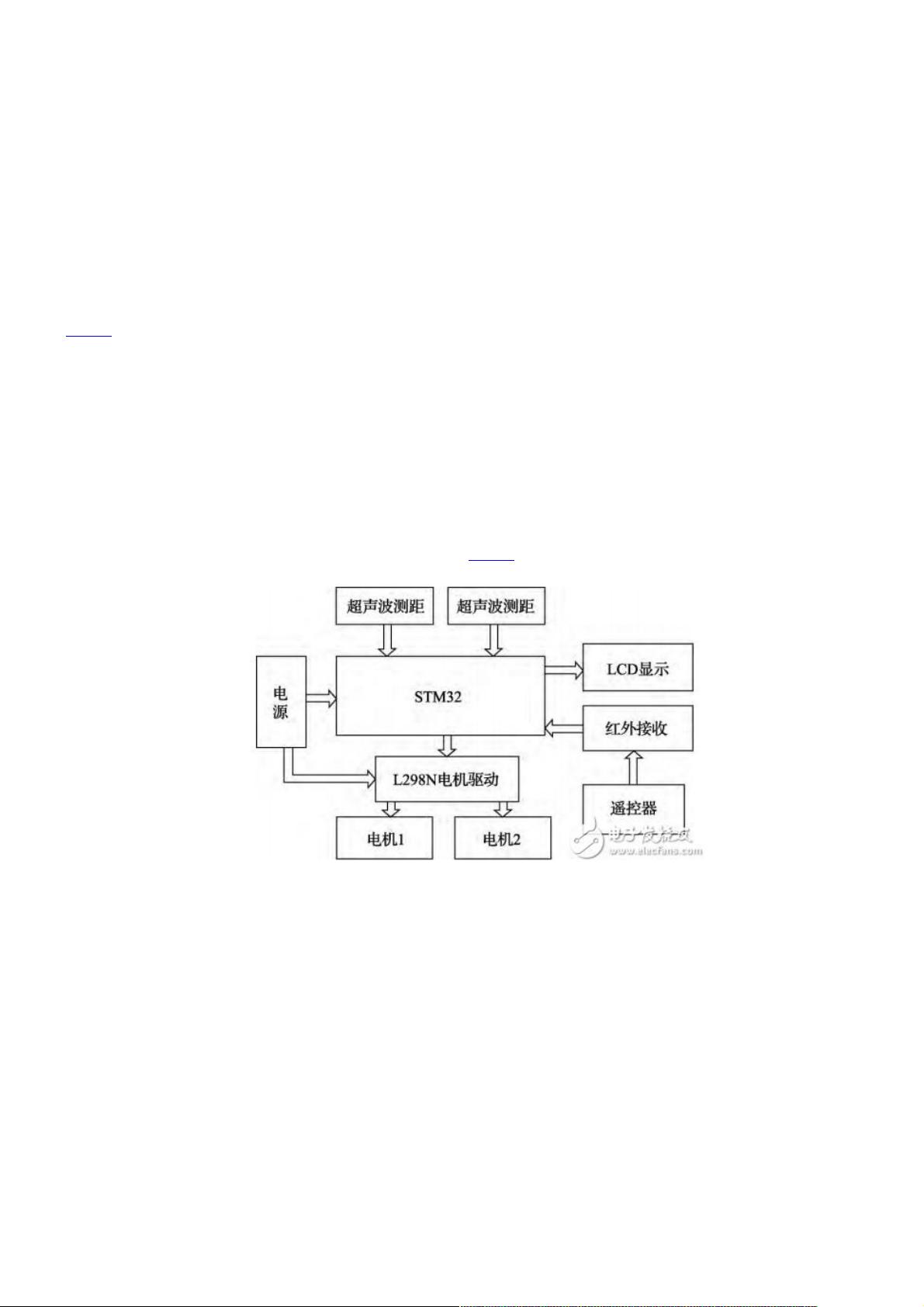
为实现小车智能跟随,采用了超声波测距、电机驱动、红外遥控等功能模块设计。通过超声波所测距离,判断小车快速前
进,慢速前进或停止。小车以STM32为主控芯片,将2个超声波测距模块测得的距离值经过运算后,输出两路PWM(Pu
LSEWIDTHMODuLAON)波分别控制左右2个电机的转速。电源给控制部分和电机驱动部分供电。另外STM32连接了LCD
显示模块和红外接收电路,分别用于显示运动、状态信息和接收遥控器的控制信号。系统总体设计如图1所示。
图1 系统总体
2..2、超声波测距模块、超声波测距模块
超声波是指频率高于20KHz的声波,超声波在介质中传播时遇到不同的界面将产生反射、绕射、折射等原理在各行各业
得到广泛应用。本设计所使用的测距模块为HC-SR04超声波模块,该模块测量范围为3~400CM,精度可达3MM,由超声波
发射探头、控制电路和驱动电路组成。模块对外引出4个引脚分别为VCC、GND、TRIG和ECHO。测距需要IO口触发,即先
给控制端TRIG至少10μS的高电平信号,模块将自动发送8个40KHz的方波并自动检测ECHO端是否有返回信号,若有返回信
号则高电平持续时间即为超声波在空气中传播的时间。由此可得:测试距离=(高电平时间&mes;声速)/2。因此将模块的
VCC、GND接入系统电源,TRIG、ECHO端接单片机普通IO口即可实现超声波测距。
2..3、电机驱动模块、电机驱动模块
小车通过一个L298N电机驱动模块驱动左右电机控制小车的运动。电机采用PWM调速,即改变直流电机电枢电压的的占
空比来改变平均电压,从而实现直流电机调速。除了2个电机对应的PWM信号调速之外,该模块还需要4路逻辑输入控制电机
M1、M2转向,模块连接如图2所示。因此将PWM信号输入端接入单片机定时器输出,逻辑输入端接单片机配置为输出模式的
IO口即可实现对该模块的控制。

weixin_38722464
- 粉丝: 4
- 资源: 939
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 基于单片机的瓦斯监控系统硬件设计.doc
- 基于单片机的流量检测系统的设计_机电一体化毕业设计.doc
- 基于单片机的继电器设计.doc
- 基于单片机的湿度计设计.doc
- 基于单片机的流量控制系统设计.doc
- 基于单片机的火灾自动报警系统毕业设计.docx
- 基于单片机的铁路道口报警系统设计毕业设计.doc
- 基于单片机的铁路道口报警研究与设计.doc
- 基于单片机的流水灯设计.doc
- 基于单片机的时钟系统设计.doc
- 基于单片机的录音器的设计.doc
- 基于单片机的万能铣床设计设计.doc
- 基于单片机的简易安防声光报警器设计.doc
- 基于单片机的脉搏测量器设计.doc
- 基于单片机的家用防盗报警系统设计.doc
- 基于单片机的简易电子钟设计.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


