
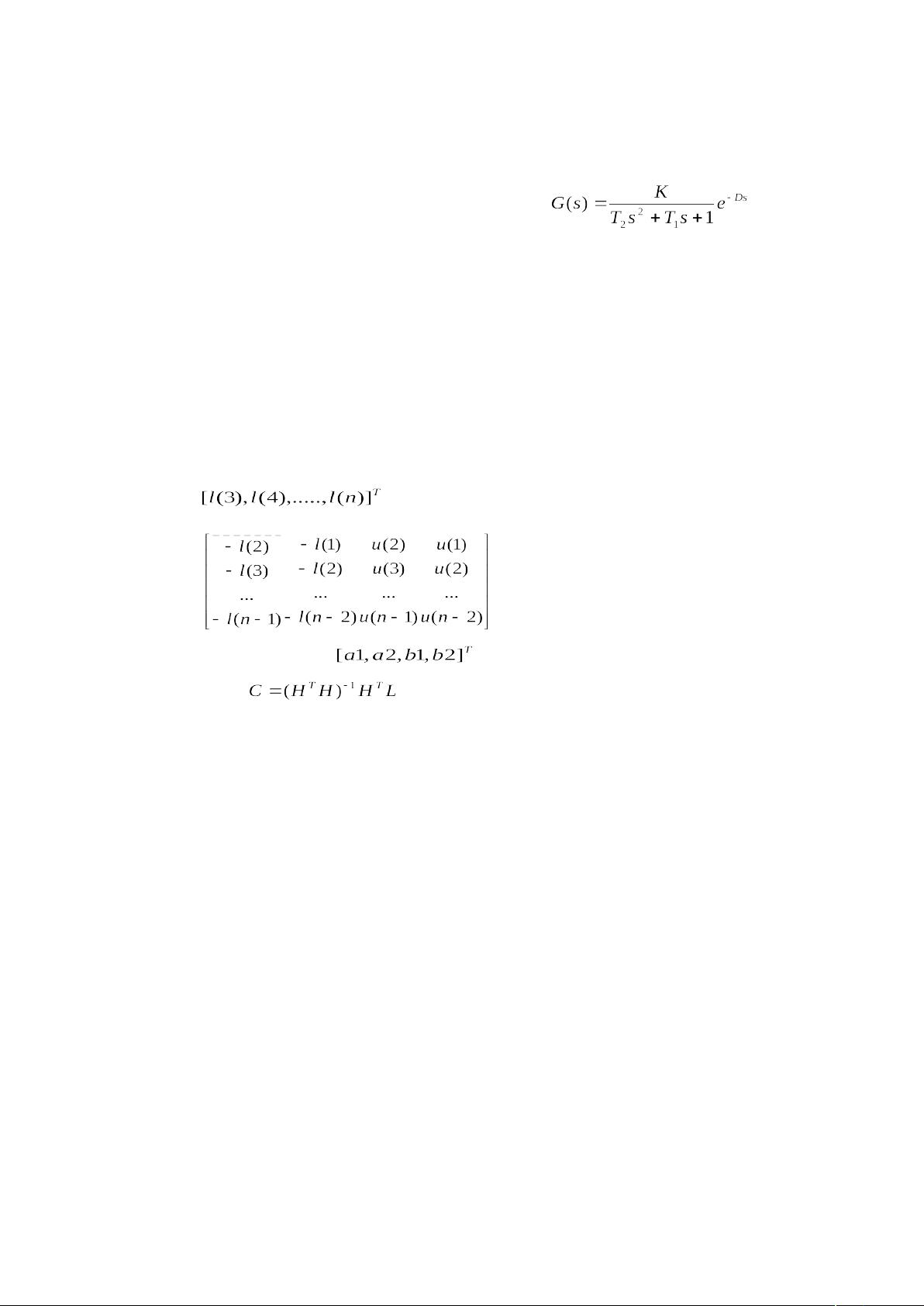
已知加热炉温度被控系统的模型可以表达为如下形式,且已知参数范围:
1<K<5,100<T2<500, 50<T1<200, 8.5<D<11.5 现从生产现场采集到的输入输出运
行数据存放在文件 u 和 yi 中(采样间隔是 5 秒)。
辨识算法分别用一次最小二乘算法和递推最小二乘算法对被控对象进行辨
识。最小二乘法是一种数学优化技术。它通过最小化误差的平方和寻找数据的
最佳函数匹配。利用最小二乘法可以简便地求得未知的数据,并使得这些求得
的数据与实际数据之间误差的平方和为最小。
3.2 辨识算法介绍
1、一次最小二乘算法
数学原理:
观测矩阵 H 和 L
L=
H=
被辨识参数矩阵 C=
公式 1:
用 MATLAB 程序编程如下:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
load y22;load u; %导入输入输出序列
u=u;y=y22; %给 u,y 赋值
D=1; %设置纯迟延为 1
N=length(u); %设置步长
for i=D+3:N
H1(i-D-1,:)=[-y(i-D),-y(i-D-1),u(i-D-1),u(i-D-2)];
end %此循环为求观测矩阵 H
H3=H1'*H1;
H4=pinv(H3); %矩阵求逆
C1=H4*H1'*y(D+2:N)'; %由公式 1 求得被辨识参数矩阵 C
a11=C1(1),a21=C1(2),b11=C1(3),b21=C1(4), %分离参数
z=tf('z',5); %设置算子
Gz1=(b11*z+b21)/(z^2+a11*z+a21) %系统的离散时间域模型
Gc1=d2c(Gz1) %系统的连续时间域模型
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
其程序的流程框图如图(2)所示:
辨识结果如下:
3
剩余12页未读,继续阅读

qq_22794285
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- VMP技术解析:Handle块优化与壳模板初始化
- C++ Primer 第四版更新:现代编程风格与标准库
- 计算机系统基础实验:缓冲区溢出攻击(Lab3)
- 中国结算网上业务平台:证券登记操作详解与常见问题
- FPGA驱动的五子棋博弈系统:加速与创新娱乐体验
- 多旋翼飞行器定点位置控制器设计实验
- 基于流量预测与潮汐效应的动态载频优化策略
- SQL练习:查询分析与高级操作
- 海底数据中心散热优化:从MATLAB到动态模拟
- 移动应用作业:MyDiaryBook - Google Material Design 日记APP
- Linux提权技术详解:从内核漏洞到Sudo配置错误
- 93分钟快速入门 LaTeX:从入门到实践
- 5G测试新挑战与罗德与施瓦茨解决方案
- EAS系统性能优化与故障诊断指南
- Java并发编程:JUC核心概念解析与应用
- 数据结构实验报告:基于不同存储结构的线性表和树实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


