
VINS-Mono: A Robust and Versatile Monocular Visual-
Inertial State Estimator
Shaozu Cao, Jie Pan, Jieqi Shi and Shaojie Shen
Hong Kong University of Science and Technology
{shaozu.cao, jpanai, jshias, eeshaojie}@connect.ust.hk
I. Original Framework
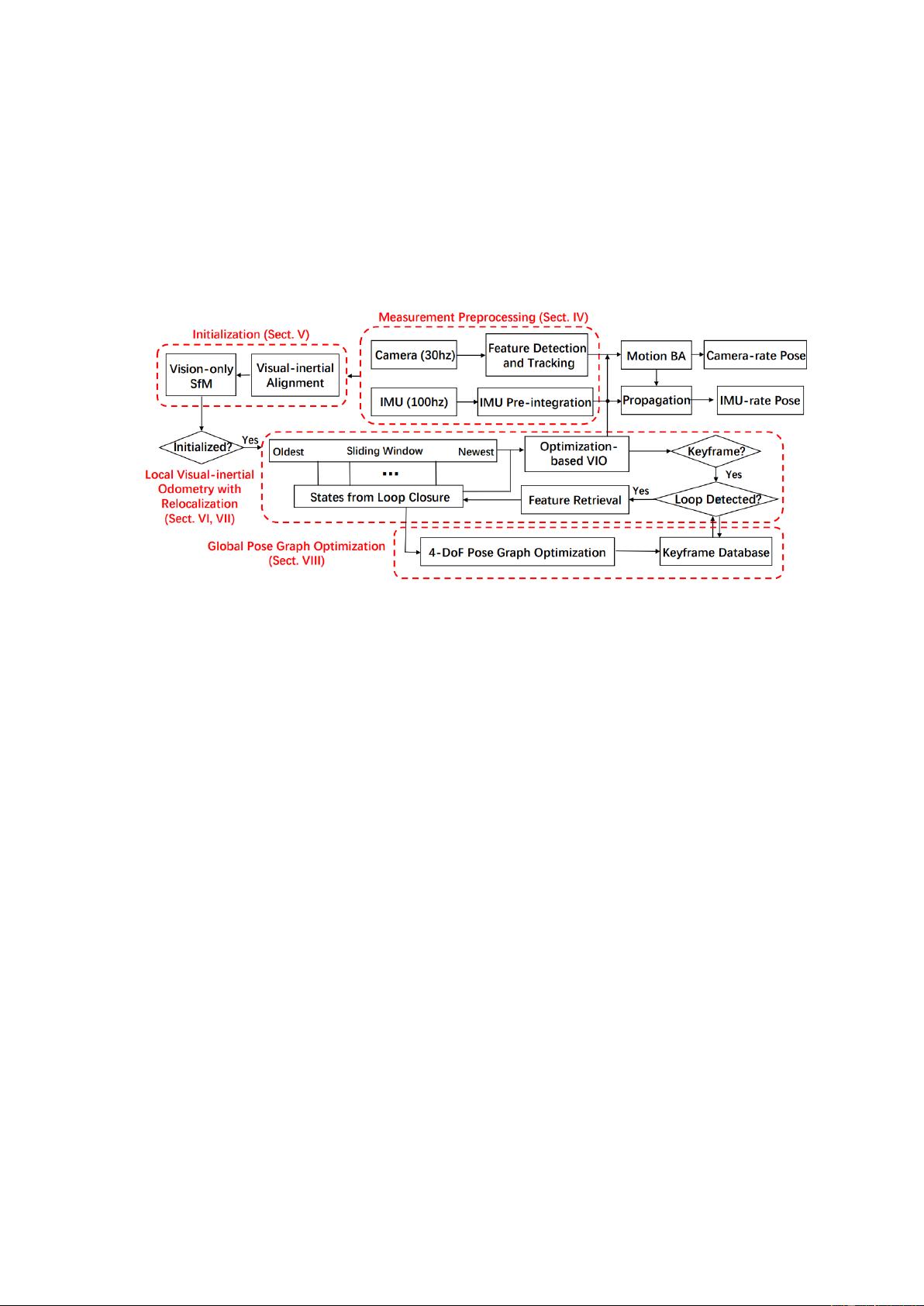
Our system is based on the VINS-MONO[1] framework illustrated in the picture.
We first extract features from images provided by a camera sensor and operate
optical flow algorithms to complete a pre-treatment. Meanwhile, we do IMU pre-
integration between two consecutive frames. After pre-processing everything we need,
we perform a robust estimator initialization.
In the initialization procedure, we make use of visual structure from motion
together with visual-inertial alignment. This loosely-coupled sensor fusion method
offers us initial values we need to build a monocular tightly-coupled visual-inertial
system.
To change from loosely to tightly coupled, we proceed with a sliding window-
based optimization system for high accuracy and robust state estimation. We also
employ marginalization to bound the computational complexity of our optimization-
based VIO. What’s more, a lightweight motion-only visual-inertial BA is carried out to
boost the estimation.

无知的猿
- 粉丝: 2
- 资源: 21
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- zigbee-cluster-library-specification
- JSBSim Reference Manual
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0