没有合适的资源?快使用搜索试试~
我知道了~
首页
PID离散化以及C语言实现
PID离散化以及C语言实现
需积分: 50
29 下载量
196 浏览量
更新于2023-05-26
收藏
8.85MB
PDF
举报
立即下载
开通VIP(低至0.43/天)
赠618次下载
身份认证 购VIP最低享 7 折!
领优惠券(最高得80元)
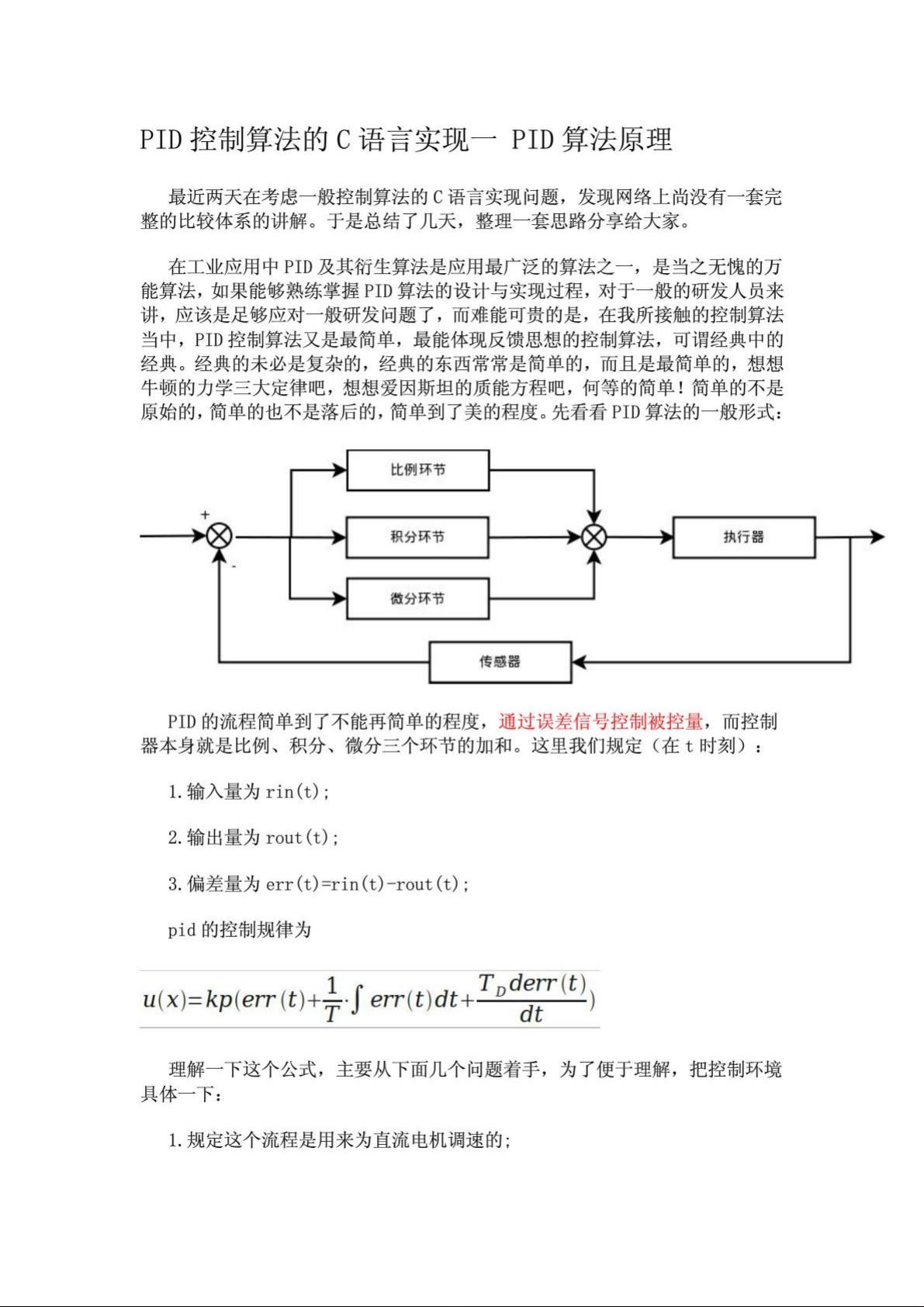
这是有关PID离散化的总结,以及C语言实现。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
资源详情
资源推荐
剩余43页未读,
继续阅读
控制系统PID加前馈反馈算法仿真
控制系统PID控制加上前馈反馈仿真代码算法,值得大家参考
最全PID控制算法的C语言实现
网上收货《最全PID控制算法的C语言实现》。很好的一份资料,希望对大家有用。
差分方程模型matlab代码
压缩包里有着关于差分方程的代码,是利用matlab进行实现。
pid控制算法的c语言实现 pdf下载
对于PID控制算法的C语言实现,可以通过网络搜索引擎或论坛等途径找到相关的资源并下载相关的PDF文件。在搜索引擎中,可以使用关键词“PID控制算法C语言实现PDF下载”进行搜索,可以得到很多相关结果。此外,也可以在...
pid控制算法的c语言实现.pdf
pid控制算法的c语言实现.pdf是一本介绍如何使用C语言来实现PID控制算法的电子书。PID控制算法是一种经典的控制算法,常用于工业控制领域。这本电子书通过简单易懂的方式,介绍了PID控制算法的基本原理和C语言实现的...
pid控制算法的c语言实现一 pid算法原理
在C语言中,可以通过如下方式实现PID控制算法: 首先,我们需要定义三个参数Kp、Ki和Kd,分别对应比例、积分和微分部分的系数。然后,定义一些变量,例如目标值、当前值、误差等。 在实际的控制过程中,首先计算...
pid各种算法的c语言实现
以下是几种常见的pid算法的C语言实现示例: 1. 标准PID算法: ```c float computePID(float error) { float kp = 0.5; // 比例系数 float ki = 0.2; // 积分系数 float kd = 0.1; // 微分系数 static float ...
神经网络pid c语言实现
神经网络PID是一种用于...总之,神经网络PID在C语言实现方面的研究和应用具有重要意义,可以为自动化控制领域的发展提供新的思路和工具。同时,这也需要深入理解控制理论和神经网络算法,并在实践中不断优化和完善。
请写一个位置型PID控制算法的C语言实现
以下是一个简单的位置型PID控制算法的C语言实现示例: ```c #include // PID参数 #define KP 1.0 // 比例增益 #define KI 0.5 // 积分增益 #define KD 0.1 // 微分增益 // PID控制器结构体 typedef struct { ...
请写一个增量型PID控制算法的C语言实现
以下是一个增量型PID控制算法的C语言实现示例: ```c #include // PID参数 #define KP 1.0 // 比例增益 #define KI 0.5 // 积分增益 #define KD 0.1 // 微分增益 // PID控制器结构体 typedef struct { double ...
pid控制算法的c语言实现(完整版)
在C语言中实现PID控制器时,可以分为三个部分:输入、处理和输出。输入阶段是通过传感器获取反馈信号,并将其转化为数字信号进行处理。处理阶段主要包括比较反馈信号和设定值,计算PID控制器的各项参数,并输出控制...
pid控制算法c语言实现
要实现PID控制算法的C语言代码,可以按照以下步骤进行: 首先,定义PID控制器的参数,包括比例系数(Kp)、积分系数(Ki)和微分系数(Kd),以及其他相关变量。 ```c float Kp = 1.0; // 比例系数 float Ki = 0.5...
c语言实现pid控制
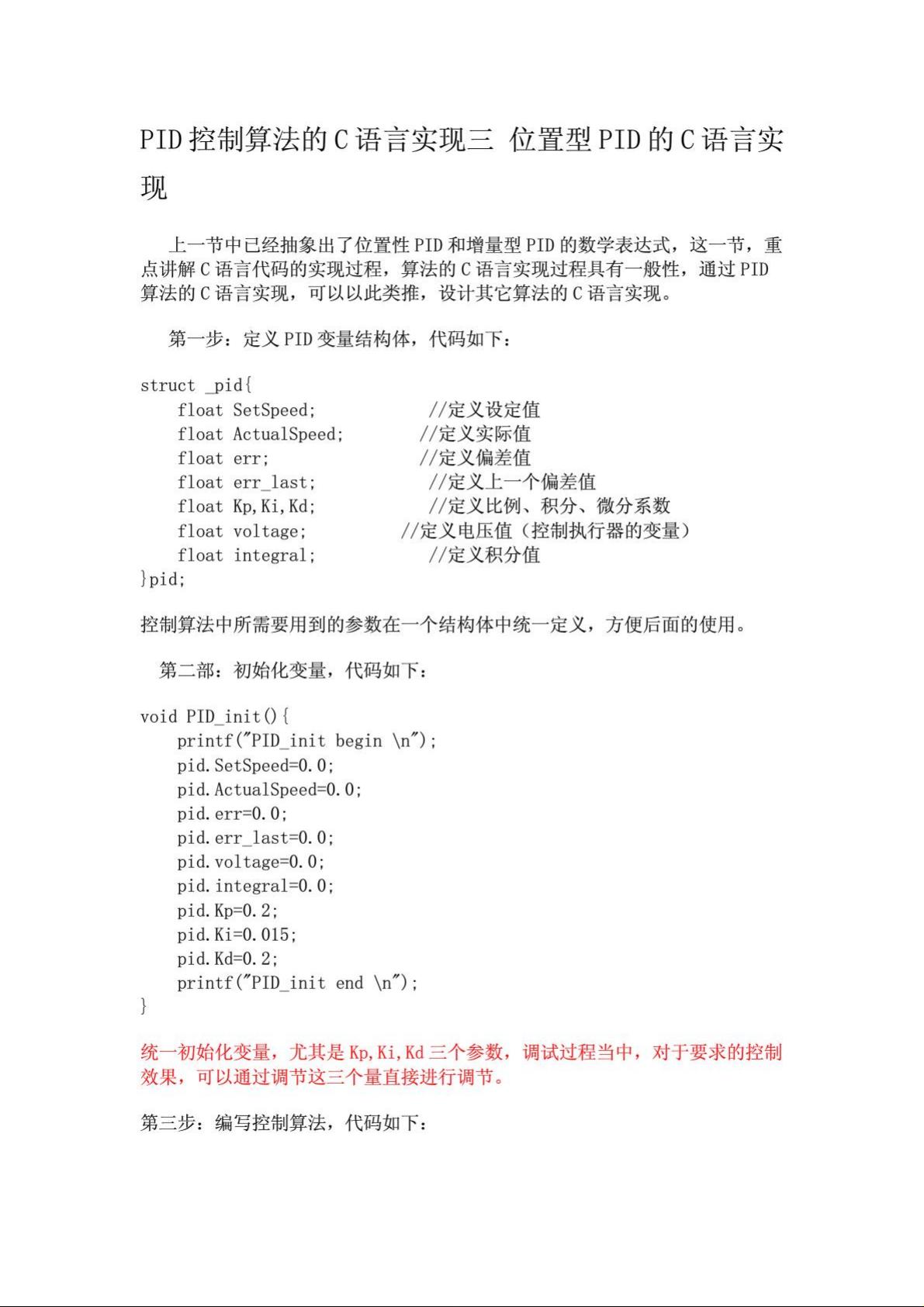
在C语言中,可以通过定义结构体来实现PID控制。具体实现过程如下: 1. 定义PID结构体,包含设定值、实际值、偏差值、上一个偏差值、比例系数、积分系数、微分系数等参数。 2. 初始化PID结构体的各个参数。 3. 在PID...
pid控制算法的c语言实现
PID算法的实现需要用到C语言,具体步骤如下: 1、定义控制器结构体,包括比例系数、积分系数、微分系数、控制误差、误差累积值、误差变化值等变量。 2、编写PID算法函数,函数的输入参数为控制器结构体指针和目标...
PID和离散化PID
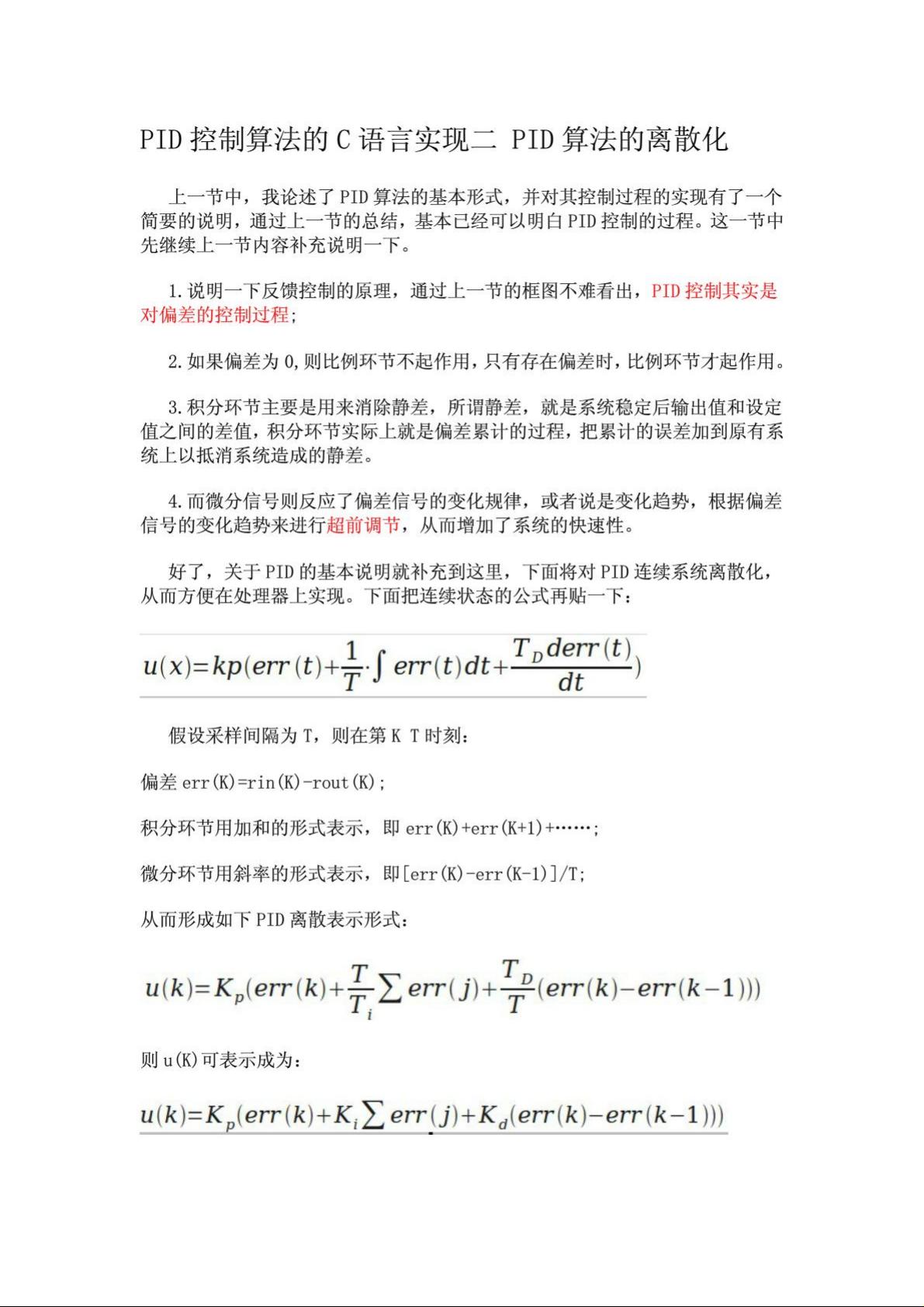
其中,Z变换法是一种常用的离散化方法,它通过对连续时间控制器传递函数进行Z变换,得到离散时间控制器的传递函数,从而实现离散化PID控制。 离散化PID在工业自动化控制中广泛应用,可以实现对离散时间系统的精确...
模糊PID算法C语言实现
### 回答1: 模糊PID算法是一种基于模糊控制原理的PID优化控制算法,它利用模糊逻辑对PID参数进行调整...而在C语言中实现模糊PID算法,则需要考虑输入输出的模糊化与解模糊化方法,以及模糊推理和PID控制的具体实现。
单片机中pid函数的c语言实现
以下是一个简单的PID控制算法的C语言实现示例: ```c #include #define Kp 1.0 // 比例系数 #define Ki 0.5 // 积分系数 #define Kd 0.2 // 微分系数 #define TARGET_VALUE 100 // 目标值 // PID控制器结构体 ...
微分先行pid控制算法 C语言实现和例子说明
以下是一个简单的微分先行PID控制器的C语言实现和例子说明: ```c // 定义PID结构体 typedef struct { float Kp; // 比例系数 float Ki; // 积分系数 float Kd; // 微分系数 float T; // 采样时间 float e0; /...
增量式PID C语言实现
以下是一个基本的增量式PID控制算法的C语言实现示例: ```c #include // PID参数 double kp = 1.0; // 比例系数 double ki = 0.5; // 积分系数 double kd = 0.2; // 微分系数 // 增量式PID控制函数 double pid_...
用c语言实现速度环PID
C语言是一种广泛使用的编程语言,可以用于实现速度环PID控制器。 在C语言中,我们可以使用一个结构体来存储PID控制器所需的变量,包括误差、比例系数、积分系数、微分系数、输出等。通常情况下,我们可以使用定时器...
dianziwang11
粉丝: 0
资源:
1
私信
上传资源 快速赚钱
我的内容管理
收起
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
会员权益专享
图片转文字
PDF转文字
PDF转Word
PDF加水印
全年可省5,000元
立即开通
最新资源
爬壁清洗机器人设计.doc
喷涂机器人.doc
爬杆机器人1.doc
喷涂机器人设计.doc
能力风暴机器人.doc
—爬杆机器人理论方案设计说明书.doc
能力风暴个人机器人用户使用手册_1419954729.doc
能力风暴机器人实验doc.doc
爬杆机器人理论方案设计说明书.doc
能力风暴机器人无线通讯卡设计.doc
皮影机器人表演设备及其所附属衍生品商业计划书.doc
能力风暴智能机器人综合版.doc
拟人机器人运动设计及制作.doc
嵌入式大作业轮式灭火机器人系统设计.doc
枪匣表面机器人砂带抛光离线编程技术研究pdfdoc.doc
嵌入式Linux远程控制机器人.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功