
GUO et al.: DISTRIBUTED ADAPTIVE SLIDING MODE CONTROL STRATEGY FOR VEHICLE -FOLL OWING SYSTEMS 983
Remark 1: In Assumption 1, the nonlinear uncertain term
f
i
(x
i
(t),v
i
(t),t) involves the position x
i
(t) an d the velocity
v
i
(t) simultaneously and can be used to denote vehicle ac-
celeration disturbances. This is a more general and relaxant
condition of nonlinear coupling function compared with that
studied in [30] and [31]. It should be pointed out that the
condition reduces to the one in [32] when θ
i
= 0. It is well
known that the acceleration disturbance caused by environ-
mental circumstances such as gust, friction on grounds, and
rolling resistance is often encountered in a practical system.
As the vehicle platoon is an interconnected coupled system,
disturbances acting on one vehicle may affect other vehicles
and even amplify spacing errors along the platoon [24], [25].
Therefore, it is necessary to deal with the effect of the accelera-
tion disturbances on the vehicle platoon. However, the existence
of nonlinear acceleration disturbance renders the controller
design more complex and challenging.
To facilitate the control design, the following lemma is
presented and will be used in the proof of our main results.
Lemma 1: For all >0andξ ∈ R, the following inequality
holds [33]:
0 ≤|ξ|−ξ tanh
ξ
≤ κ
where κ is a constant that satisfies κ = e
−(κ+1)
,thatis,κ= 0.2785.
B. Problem Formulation
The goal of the platoon control is to maintain desired safety
spacing between any two consecutive vehicles and reach the
velocity consensus among vehicles. Our control objectives then
are formally stated as follows.
1) Design distributed adaptive ISMC strategies to ensure
bounded stability of each vehicle system based on TCTH
and MCTH policies.
2) Provide an MCTH policy to remove the assumption of
zero initial spacing and velocity errors and increase th e
traffic density simultaneously.
3) Maintain the intervehicle distance equal to a desired
safety distance and make all the followers’ velocities
follow the leader’s velocities.
4) Ensure string stability of the vehicle platoon.
5) Construct adaptive compensation terms to compensate for
the time-variant effects caused by nonlinear acceleration
uncertainties.
III. D
ISTRIBUTED ADAPTI VE INTEGRATED
SLIDING MODE CONT ROL STRATEGY
Here, two distributed adaptive ISMC strategies based on the
TCTH and MCTH policies, respectively, are proposed to attain
the string stability of the nonlinear vehicle control system (1)
with a leader (2).
A. Control Strategy I: TCTH Control Law
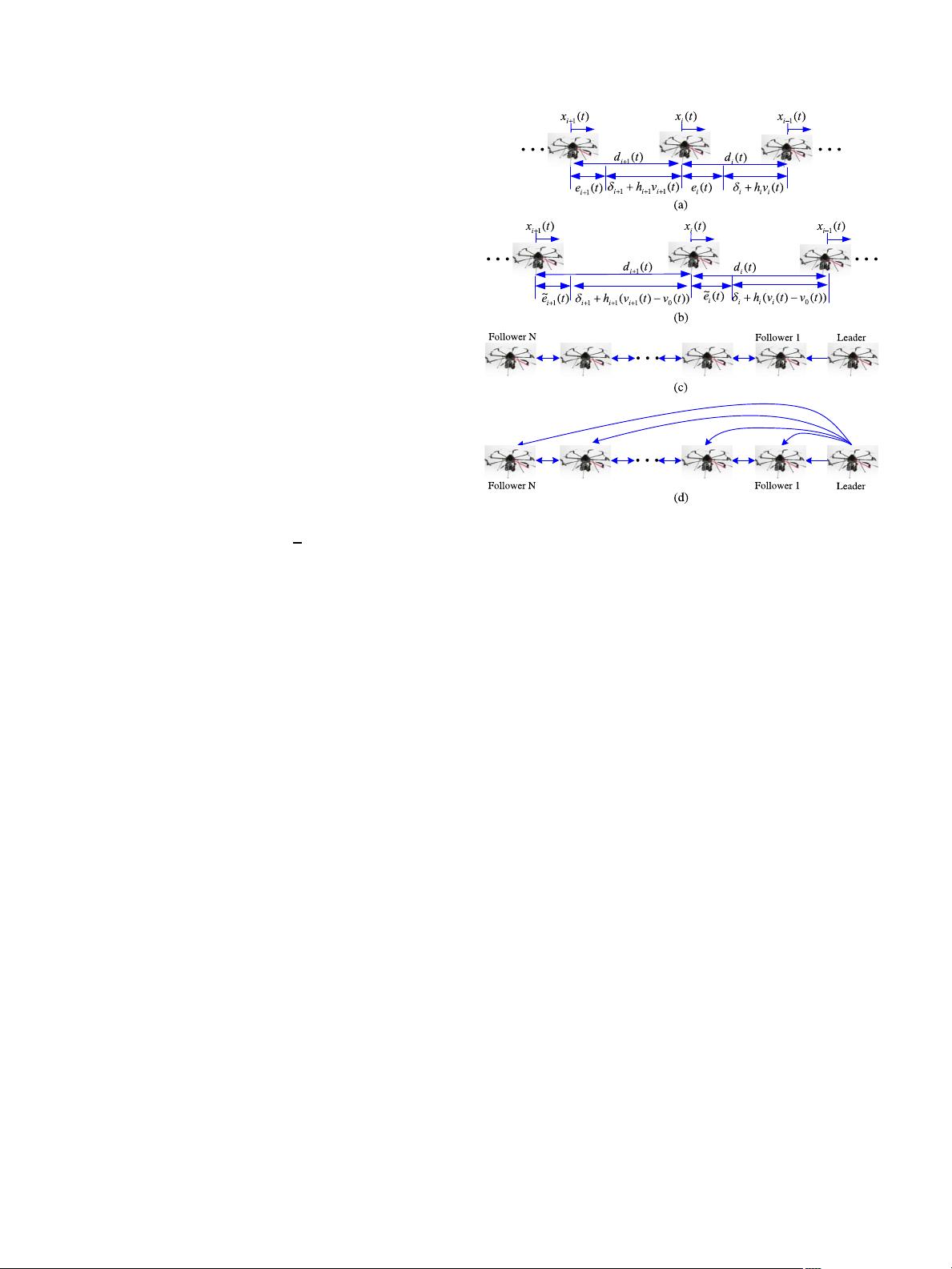
The aim of the platoon control is that of imposing on the
followers the velocity of the leader and a given spacing policy
Fig. 1. (a) TCTH policy. (b) MCTH policy. (c) TCTH policy: bidirectional
topology (BT). (d) MCTH policy: bidirectional-leader topology (BLT).
between two consecutive vehicles. Consider the TCTH policy
used in [8], [17], [18] as follows:
e
x
i
(t)=d
i
(t) − δ
i
− h
i
v
i
(t)
= d
i
(t) − δ
i
− h
i
e
v
i
(t)+h
i
v
0
(t)
e
v
i
(t)=v
i
(t) − v
0
(t)
(4)
where δ
i
> 0andh
i
> 0 are the required ith standstill distance
and CTH, respectively. d
i
(t) is the relative distance between the
preceding vehicle and the ego vehicle and is defined as follows:
d
i
(t)=x
i−1
(t) − x
i
(t). (5)
The parameters relevant to any two adjacent vehicles in a
platoon by using the TCTH policy is shown in Fig. 1(a). The
network topology of the TCTH policy is shown in Fig. 1(c).
For the nonlinear vehicle control system (1) with a leader (2),
we design an integral sliding surface as
s
i
(t)=e
x
i
(t)+
t
0
λe
x
i
(τ)dτ. (6)
where λ is a positive design parameter. However, to guarantee
string stability, similar to [21], a coupled sliding surface is
defined as follows:
S
i
(t)=qs
i
(t) − s
i+1
(t),i∈V
N
/{N} (7)
where q is a positive design parameter, which couples both slid-
ing surfaces s
i
(t) and s
i+1
(t).Lets
N+1
(t)=0sinces
N+1
(t)
does not exist in the case of the last vehicle (i.e., i = N ). Then,
we can obtain the following relationship between S
i
(t) and s
i
(t):
S(t)=Qs(t) (8)
剩余10页未读,继续阅读

假装高冷小姐姐
- 粉丝: 281
- 资源: 948
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


