
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED DECEMBER, 2020 1
FUEL: Fast UAV Exploration using Incremental
Frontier Structure and Hierarchical Planning
Boyu Zhou, Yichen Zhang, Xinyi Chen and Shaojie Shen
Abstract—Autonomous exploration is a fundamental problem
for various applications of unmanned aerial vehicles(UAVs).
Existing methods, however, were demonstrated to insufficient
exploration rate, due to the lack of efficient global coverage,
conservative motion plans and low decision frequencies. In this
paper, we propose FUEL, a hierarchical framework that can sup-
port Fast UAV ExpLoration in complex unknown environments.
We maintain crucial information in the entire space required by
exploration planning by a frontier information structure (FIS),
which can be updated incrementally when the space is explored.
Supported by the FIS, a hierarchical planner plans exploration
motions in three steps, which find efficient global coverage paths,
refine a local set of viewpoints and generate minimum-time
trajectories in sequence. We present extensive benchmark and
real-world tests, in which our method completes the exploration
tasks with unprecedented efficiency (3-8 times faster) compared
to state-of-the-art approaches. Our method will be made open
source to benefit the community
1
.
Index Terms—Aerial Systems: Applications; Aerial Systems:
Perception and Autonomy; Motion and Path Planning
I. INTRODUCTION
U
NMANNED aerial vehicles, especially quadrotors have
gained widespread popularity in various applications,
such as inspection, precision agriculture, and search and
rescue. Among the tasks, autonomous exploration, in which
the vehicle explores and maps the unknown environment to
gather information, is a fundamental component.
Various exploration planning methods have been proposed
in recent years, with some real-world experiments presented
[1]–[4]. However, most of them demonstrate a low/medium
exploration rate, which is unsatisfactory for many large-scale
real-world applications. First of all, many existing planners
plan exploring motions in greedy manners, such as maximizing
the immediate information gain, or navigating to the closest
unknown region. The greedy strategies ignore global opti-
mality and therefore result in low overall efficiency. Besides,
most methods generate rather conservative motions in order
to guarantee information gain and safety simultaneously in
previously unknown environments. Low-speed exploration,
Manuscript received: October, 15, 2020; Accepted December, 13, 2020.
This paper was recommended for publication by Editor Pauline Pounds upon
evaluation of the Associate Editor and Reviewers’ comments. This work
was supported by Research Grants Council (RGC) project no.16213717, ITC
project no.ITT/027/19GP, HDJI lab. All authors are with the Department of
Electronic and Computer Engineering, Hong Kong University of Science and
Technology, Hong Kong, China. {bzhouai, yzhangec, xchencq,
eeshaojie}@connect.ust.hk. Digital Object Identifier (DOI): see top
of this page.
1
To be released at https://github.com/HKUST-Aerial-Robotics/FUEL
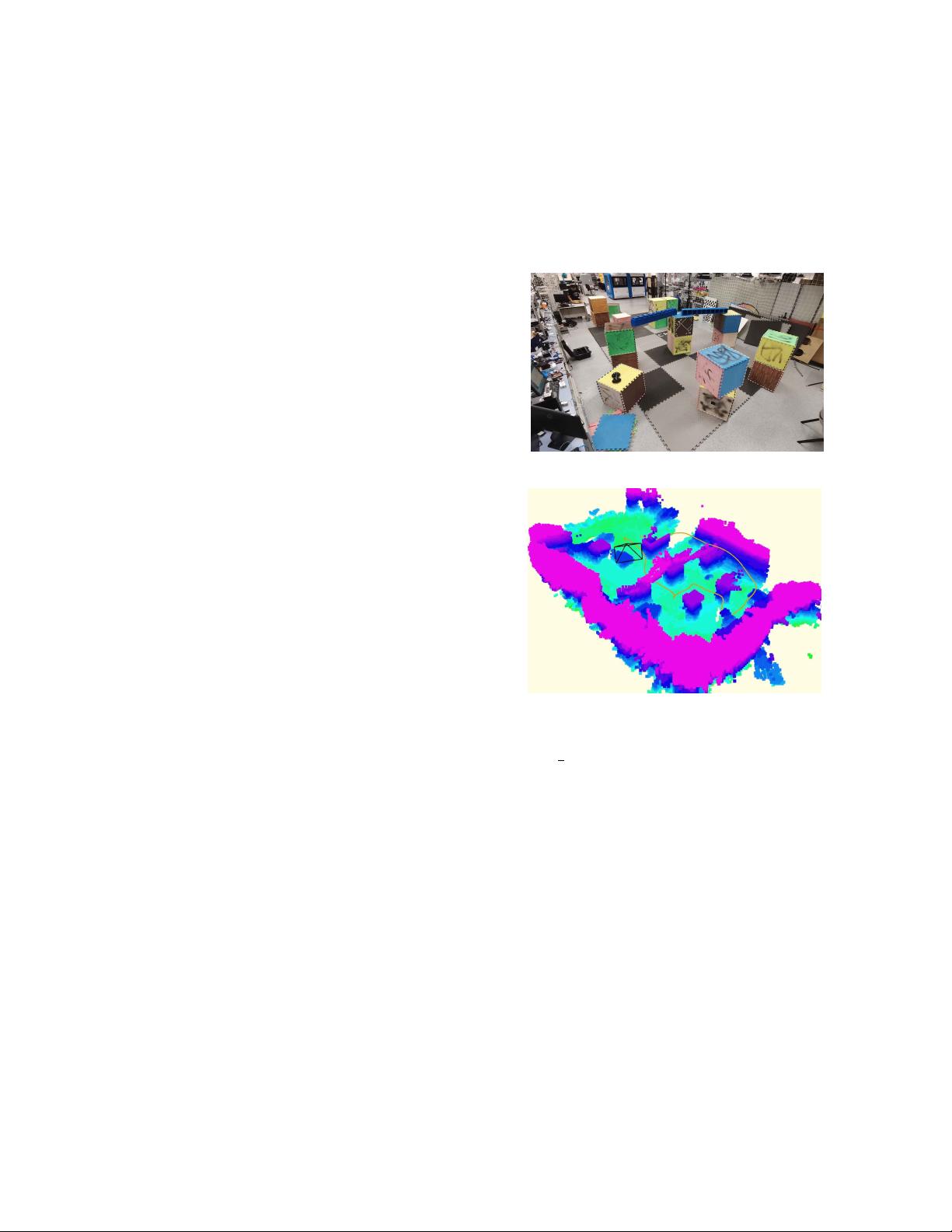
(a) A cluttered environment for the exploration tests.
(b) The online built map and executed trajectory.
Fig. 1. A quadrotor autonomous exploration test conducted in a complex
indoor scene. Video of the experiments is available at: https://www.youtube.
com/watch?v= dGgZUrWk-8.
however, disallows quadrotors to fully exploit their dynamic
capability to fulfill the missions. Last but not least, many
methods suffer from high computational overhead and can
not respond quickly and frequently to environmental changes.
However, to enable faster exploration, it is desirable to replan
new motions immediately whenever new information of the
environment is available.
Motivated by the above facts, this paper proposes FUEL,
a hierarchical framework that can support Fast UAV
ExpLoration in complex environments. We introduce a frontier
information structure (FIS), which contains essential informa-
tion in the entire space required by exploration planning. The
structure can be updated efficiently and incrementally when
new information is collected, so it is capable of supporting
high-frequency planning. Based on the FIS, a hierarchical
planner generates exploring motion in three coarse-to-fine
steps. It starts by finding a global exploration tour that is op-
timal in the context of accumulated environment information.
Then, viewpoints on a local segment of the tour are refined,
further improving the exploration rate. Finally, a safe, dynam-
©2020 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses.
arXiv:2010.11561v2 [cs.RO] 26 Dec 2020
下载后可阅读完整内容,剩余7页未读,立即下载

路易萧叁
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


