多旋翼姿态控制mc_att_control源码分析
需积分: 49 132 浏览量
更新于2024-07-16
1
收藏 3.67MB PDF 举报
"mc_att_control源码简单分析.pdf,主要探讨了PX4无人机系统中多旋翼姿态控制模块mc_att_control的源码分析,包括姿态控制框架、文件函数入口、功能代码实现等关键点。"
在多旋翼无人机领域,姿态控制是飞行稳定性的核心,而mc_att_control模块是PX4固件中负责这一任务的关键组件。该源码分析主要聚焦于px4v1.5.5版本,源代码可以在GitHub上的PX4/Firmware仓库找到。
一、姿态控制框架
姿态控制采用经典的串级PID结构,分为外环和内环。外环处理角度误差,目标是使实际角度接近期望角度,通过计算期望的角速度来实现这一目标。内环则作用于角速度差,生成电机控制信号,即四个电机的力矩,以调整旋翼转速。在+字型布局的多旋翼无人机中,合力决定了基础电机转速,叠加姿态信息后确定每个电机的具体转速。
关键点在于外环中的姿态误差表示方式和内环控制量的抗饱和处理。姿态误差通常用欧拉角或四元数来表达,抗饱和处理则确保控制信号不会超出电机或控制器的物理限制。
二、文件函数的入口
mc_att_control模块的入口函数始于px4的启动过程。在接收到start、stop或status参数后,代码会检查mc_att_control实例是否已存在。如果不存在,将通过new操作符创建一个新的MulticopterAttitudeControl实例,分配内存并初始化所需变量。
在启动脚本rc.mc_app中详细描述了mc_att_control的启动流程。当调用start参数时,如果mc_att_control::g_control为空,意味着没有正在运行的进程,此时会创建一个新的进程实例。
三、功能代码实现
1. 系统数据流:模块需要接收来自传感器的数据,如IMU(惯性测量单元)的角速度和加速度,以及来自飞控系统的其他信息。
2. 数据订阅:mc_att_control模块订阅这些传感器数据,并根据需求进行处理。
3. 姿态控制外环处理:控制函数`control_attitude(float dt)`负责处理角度误差,计算期望的角速度。
4. 姿态控制手动外环处理:在手动飞行模式下,此部分处理飞行员的输入。
5. 姿态控制内环处理:内环PID控制器计算电机控制信号,确保角速度的精确跟踪。
总结,mc_att_control源码分析揭示了PX4无人机如何通过精确的内外环控制策略来实现多旋翼飞行器的姿态稳定。理解这一模块的工作原理对于优化飞行性能、提升飞行安全性和控制精度至关重要。
阿木社区 |Better |gen_better@163.com
7
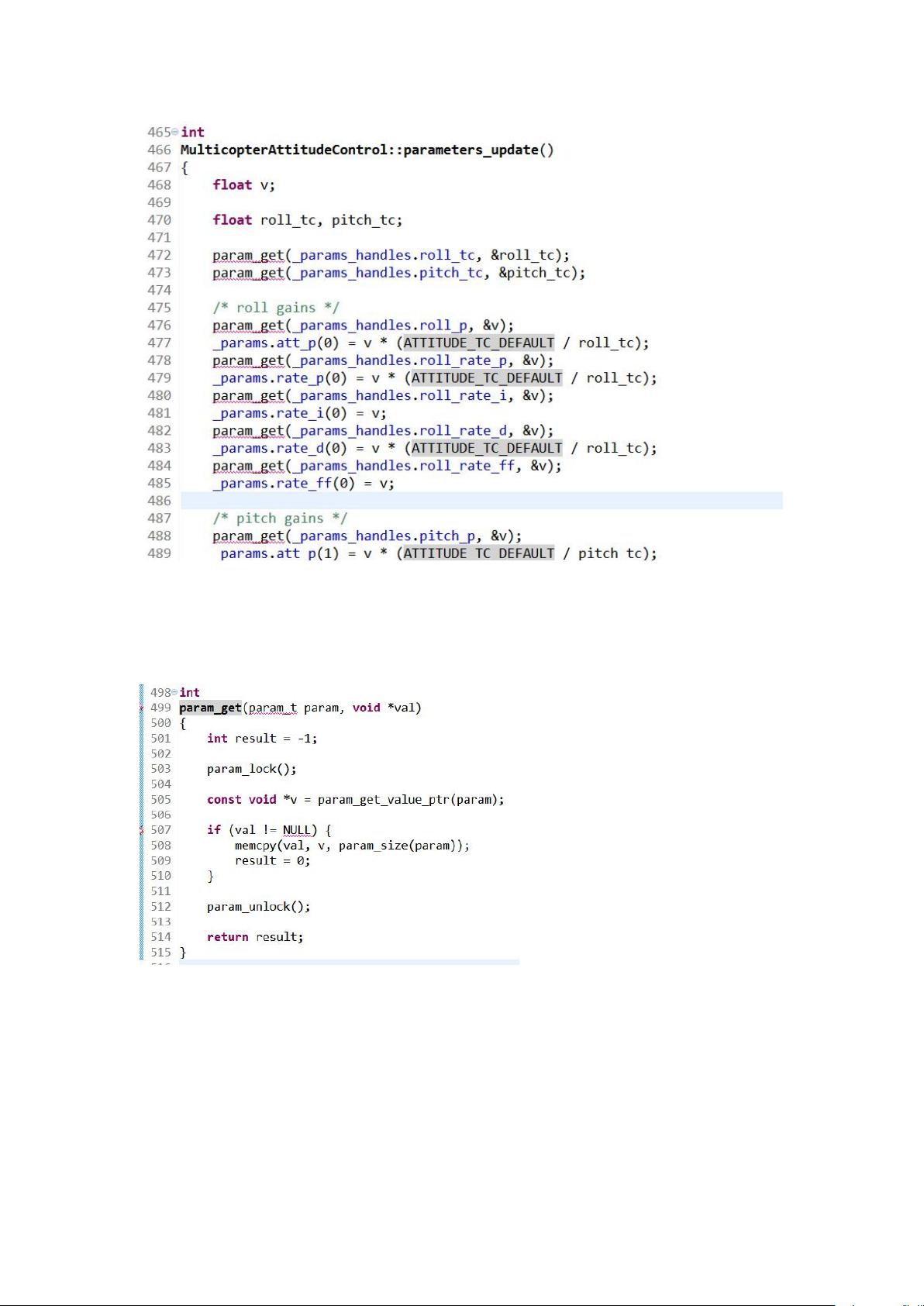
这一部分代码涉及文件 mc_att_control_params.c 默认参数获取。
其中 param_get()函数比较重要,特别是内部使用的 lock 和 unlock 的使用(主要就是通过
sem 信号量控制对某一数据的互斥访问)。
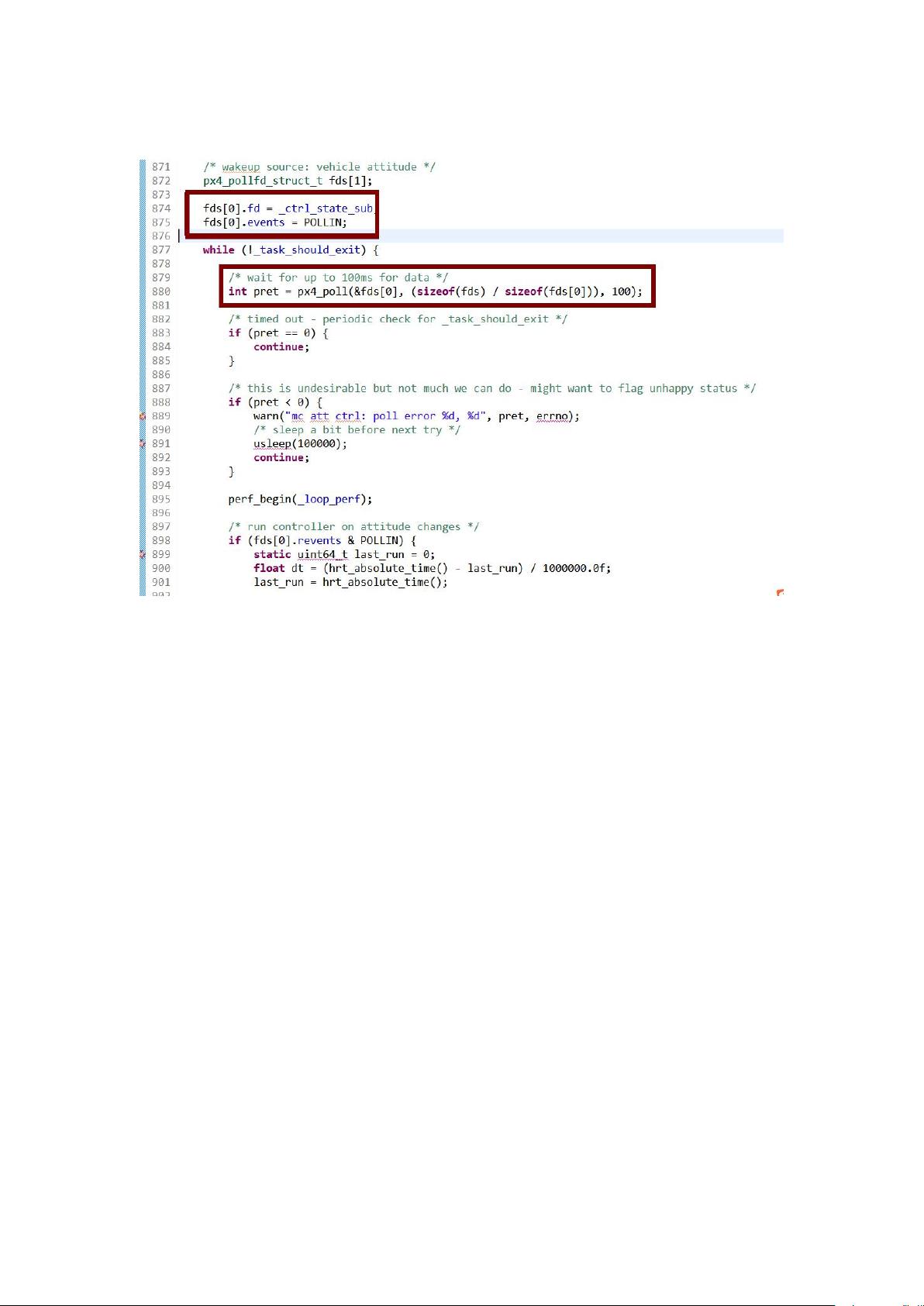
到目前为止已经拿到了很多数据,但其中对于数据
_ctrl_state_sub=orb_subscribe(ORB_ID(control_state));
系统采用阻塞等待的方式获取数据,对于其他数据则是用 check 的方式检查更新,为什么地
位如此不同。因为在姿态控制里面,最基本的数据是飞机当前的姿态,control_state 主题中
包含飞机当前的姿态数据,每次当前姿态数据发生变化,姿态控制都需要重新运行,如果拿
不到最新的姿态的数据,姿态控制的运行也没多大意义,所以阻塞等待“control_state”这
剩余35页未读,继续阅读
1379 浏览量
122 浏览量
139 浏览量
139 浏览量
159 浏览量
126 浏览量
107 浏览量

LEO爱排骨
- 粉丝: 14
- 资源: 118
 我的内容管理
展开
我的内容管理
展开







最新资源
- 有关GSM原理一些详细描述
- MyEclipse中文攻略
- tech ourself shell programming
- 常用算法设计方法常用算法设计方法
- 王宏文《自动化专业英语教程》PART1中文翻译
- 中文TEX教程 inotes.pdf
- 时代光华《成功的项目管理》讲义
- Bruce Eckel - Thinking In Patterns Problem-Solving Techniques Using Java
- 电视系统常用名词解释
- modelsim 使用教程
- MyEclipse 6 Java 开发中文教程
- java模式(精华篇)
- JSP基础(英文版)
- ★java及j2ee面试题集(很重要).
- JSP网页编程 JSp课件
- Linux常用命令大全整理
