Python小乌龟案例: Subscriber集成与调试优化
需积分: 0 174 浏览量
更新于2024-08-05
收藏 123KB PDF 举报
在本资源中,主要探讨的是在C++和Python环境下,利用ROS(Robot Operating System)进行小乌龟案例的实现,特别是涉及到subscriber(订阅者)的创建、回调函数以及界面交互的调试。首先,让我们从C++部分开始:
1. **Subscriber创建**:
在C++中,通过`rospy.Subscriber`函数创建一个订阅者,如`poseTopicName="/turtle1/pose"`,用于接收特定主题(例如 `/turtle1/pose`)发布的消息,这里的主题通常包含传感器数据或控制指令。这个订阅器会在接收到`Pose`类型的消息时调用自定义的回调函数`poseCallback`。
2. **订阅回调**:
`poseCallback`函数是用户定义的处理接收到消息的函数,这里简单地打印消息内容。对于C++,由于ROS的消息传递是同步的,这意味着当消息到达时,程序会暂停直到处理完该消息。这可能会影响UI的响应速度。
3. **调试与问题**:
C++代码在调试过程中发现,尽管能够正常接收到订阅的消息,但在窗口关闭方面存在局限性,即只能通过关闭QT界面来结束进程,而不能通过命令行控制。这是因为C++中的ROS集成方式限制了与主线程的交互。
4. **异步策略与Python**:
相比之下,Python使用SIP(Simple API for PyQt)来操作QT界面,采用异步策略,允许在消息处理和UI更新之间更流畅地切换。因此,Python能更好地处理消息循环,不会阻塞主线程,使得窗口关闭可以通过命令行操作。
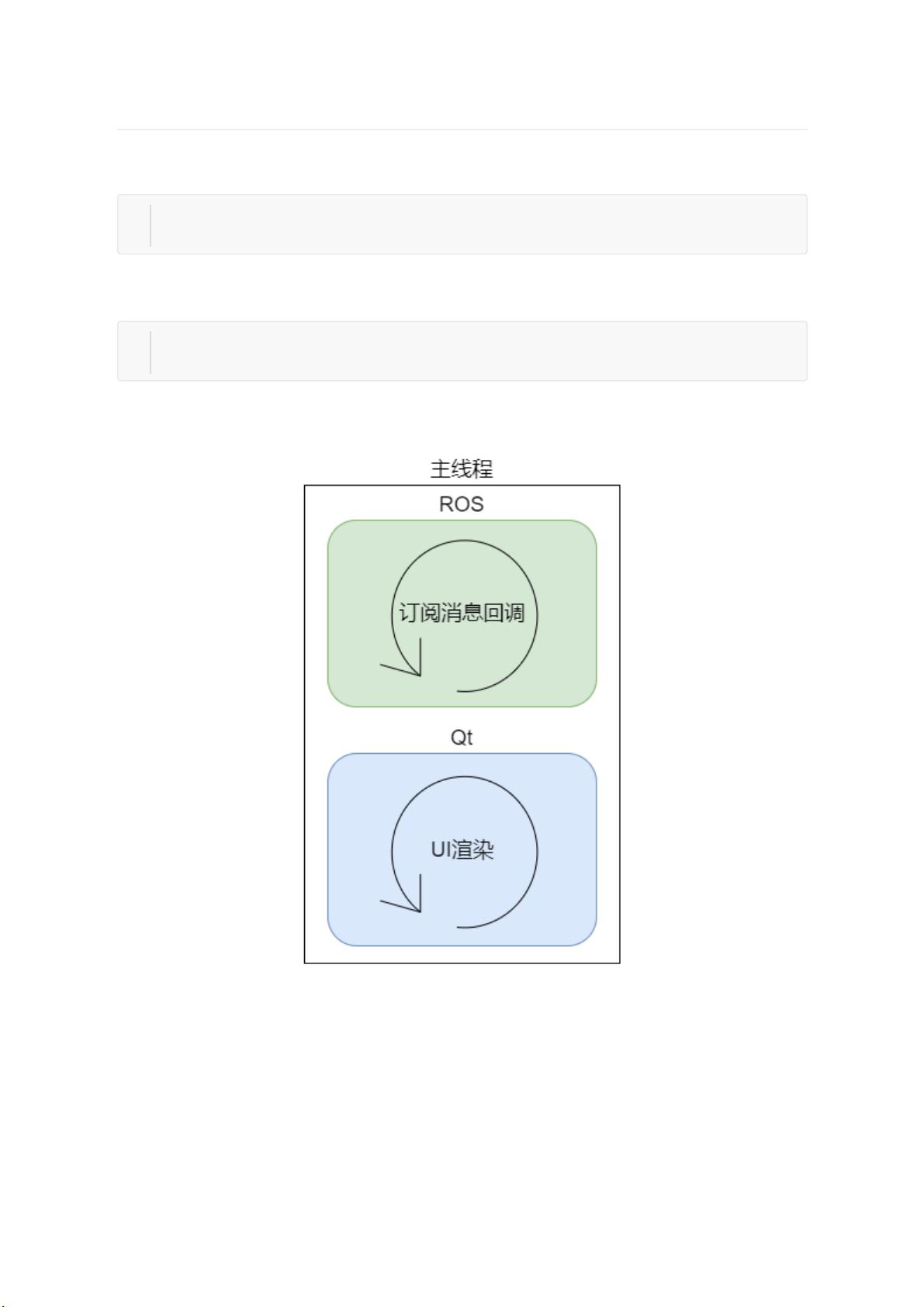
5. **接管渲染与定时更新**:
在C++代码中,`updateTimer`被用来定期触发`onUpdate`函数,以确保UI的实时更新。当`rospy.is_shutdown()`返回True时,关闭窗口。这种方式在C++中确保了UI的及时响应,并与ROS消息系统的生命周期管理相协调。
6. **完整示例代码:MainWindow**:
`MainWindow`类定义了一个Qt应用程序,设置了自定义的刷新功能,使用`QTimer`每16毫秒调用一次`onUpdate`函数,其中包含UI更新逻辑和ROS消息处理的检查。
总结来说,这段资源重点在于比较C++和Python在ROS集成中的不同之处,特别是在处理UI更新和消息回调上的异步/同步策略。同时,它也展示了如何在C++环境中实现类似Python的用户体验优化,即通过定时器来管理UI的更新,并在适当的时候退出程序。这对于理解和优化基于ROS的跨平台软件开发至关重要。
Subscriber整合
1. 添加subscriber创建
2. 添加订阅回调
3. 调试
与C++不同,调试结果为可以正常接收到订阅的消息。但是关于窗体关闭事件方面只能通过关闭QT界面
来关闭进程,不同通过命令行来。
Python可以正常接收到订阅消息的原因,在于Python采用的SIP方式进行操作QT的界面UI的中间是一套
异步策略。
但是为了更好的优化体验,我们也是可以和C++实现的代码逻辑想通的。
接管渲染:
poseTopicName = "/turtle1/pose"
rospy.Subscriber(poseTopicName, Pose, self.poseCallback)
1
2
def poseCallback(self, msg):
print msg
1
2
下载后可阅读完整内容,剩余3页未读,立即下载
2022-08-03 上传
2022-08-03 上传
2023-11-10 上传
2023-11-20 上传
2024-07-02 上传
2023-06-07 上传
2023-10-19 上传
2023-06-01 上传
2023-07-27 上传

白羊带你成长
- 粉丝: 25
- 资源: 328
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决本地连接丢失无法上网的问题
- BIOS报警声音解析:故障原因与解决方法
- 广义均值移动跟踪算法在视频目标跟踪中的应用研究
- C++Builder快捷键大全:高效编程的秘密武器
- 网页制作入门:常用代码详解
- TX2440A开发板网络远程监控系统移植教程:易搭建与通用解决方案
- WebLogic10虚拟内存配置详解与优化技巧
- C#网络编程深度解析:Socket基础与应用
- 掌握Struts1:Java MVC轻量级框架详解
- 20个必备CSS代码段提升Web开发效率
- CSS样式大全:字体、文本、列表样式详解
- Proteus元件库大全:从基础到高级组件
- 74HC08芯片:高速CMOS四输入与门详细资料
- C#获取当前路径的多种方法详解
- 修复MySQL乱码问题:设置字符集为GB2312
- C语言的诞生与演进:从汇编到系统编程的革命
