低动态工作空间中多会话RGBD SLAM框架
需积分: 9 148 浏览量
更新于2024-08-26
收藏 3.16MB PDF 举报
"这篇论文提出了一种在低动态工作空间中进行多会话RGBD SLAM(同时定位与建图)的框架,旨在解决自主移动机器人在环境发生变化时的映射问题。"
文章主要讨论了在动态环境中,由于工作空间不可避免的变化,对自主移动机器人进行地图构建的重要性。作者提出了一个适用于低动态环境的RGBD SLAM框架,该框架能够持续更新并保持地图的最新状态。这里的低动态环境指的是环境变化相对较慢的情况。
关键知识点:
1. **RGBD SLAM**:RGBD SLAM是机器人定位和建图的一种方法,它利用来自RGBD相机的数据(包括彩色图像和深度信息)来同时估计机器人的运动轨迹和构建环境地图。
2. **多会话**:在多会话设置中,机器人多次访问同一区域,每次访问都会更新或扩展之前构建的地图。这有助于处理环境随时间变化的情况。
3. **姿态图模型**:环境的主要模型是一个多会话姿态图,它随着机器人多次访问而演变。姿态图中的节点代表机器人的位置,边则表示位置之间的相对关系。
4. **姿态图修剪**:当对应于特定姿态的3D点云扫描过期时,姿态图中的相应节点会被删除。这是为了确保地图反映的是最新的环境状态。
5. **新区域探索**:当机器人探索新区域时,其新的位置信息会被添加到姿态图中,从而不断扩展和更新地图。
6. **过期扫描识别模块**:通过分析不同时间点的扫描数据,这个模块能检测出环境的变化,识别出哪些扫描数据已经不再反映当前环境。
7. **环境变化检测**:环境变化的检测对于保持地图的准确性和实时性至关重要。通过过期扫描的识别,系统能有效地更新地图,适应环境的动态变化。
此框架对于在室内或受控环境中的服务机器人、自动驾驶车辆等应用具有实际意义,因为这些场景虽然存在一定的动态变化,但通常变化速度较慢,适合采用这样的SLAM策略。通过这种框架,机器人可以更好地适应和理解其周围环境,提高其自主导航和任务执行能力。
information for better poses configuration estimation. So in
these works, anchor n odes [9], weak links [1,6] are introduced
to solve the problem. The vision based SLAM in low dynamic
environment has also been studied. In Ref. [10], multiple poses
formed a view cluster, in which the images with the similar
view would be updated over time. This method can tell
whether a frame is out-of-dated but cannot show which part
has been changed as it was a sparse visual feature based
method.
Most existing methods dealing with SLAM in dynamic
environment is based on 2D laser SLAM. In Refs. [11,12], the
set of scans in global coordinates was updated by sampling
after each new session to build an in-dated map. In their work,
poses were estimated by SLAM at the first session. For the
later sessions, the poses were estimated by localization, not
included in the SLAM framework. In Refs. [8,13], both works
described the dynamic with each cell in grid occupancy map
having an inde pendent Markov Model. In Ref. [7], a dynamic
environment map was modeled as a pose graph. After each
session, the out-of-dated poses are identified and removed
based on 2D occupancy grid map built from the laser data. In
Ref. [14], the poses related to the low dynamics were removed
to enhance the robust of the optimizer.
In the context of RGBD SLAM, most works apply the
graph mode l, followed by a global optimization backe nd. In
Ref. [15], both visual features and depth information are
employed to form an edge in the pose graph. Besides the
formulation, an environment measurement model was pro-
posed for pose graph edge selection in Ref. [3]. In Ref. [4],a
dense visual odometry is used as frontend to formulate the
pose graph, which is more accurate than sparse featur e based
visual odometry. In Ref. [5], non-rigid deformation is com-
bined with the pose graph optimization for globally consistent
dense map, which takes the map mesh into consideration.
Extension of these RGBD SLAM systems to multi-session can
be achieved by applying the methods developed in Refs.
[1,6,9]. But the detection of dynamics by simply using the
laser based method is difficult, as the methods employed an
occupancy grid map for information fusion and de-noise.
When it comes to the case of RGBD sensor, the 3D o ccu-
pancy grid map is intractable due to the high complexity. So
methods should be developed on the raw senso r data, making
the problem more challenging.
Besides the mechanism for dealing with dynamic envi-
ronment, a framework for RGBD SLAM also needs node
pruning to keep the computational complexity noncumulative.
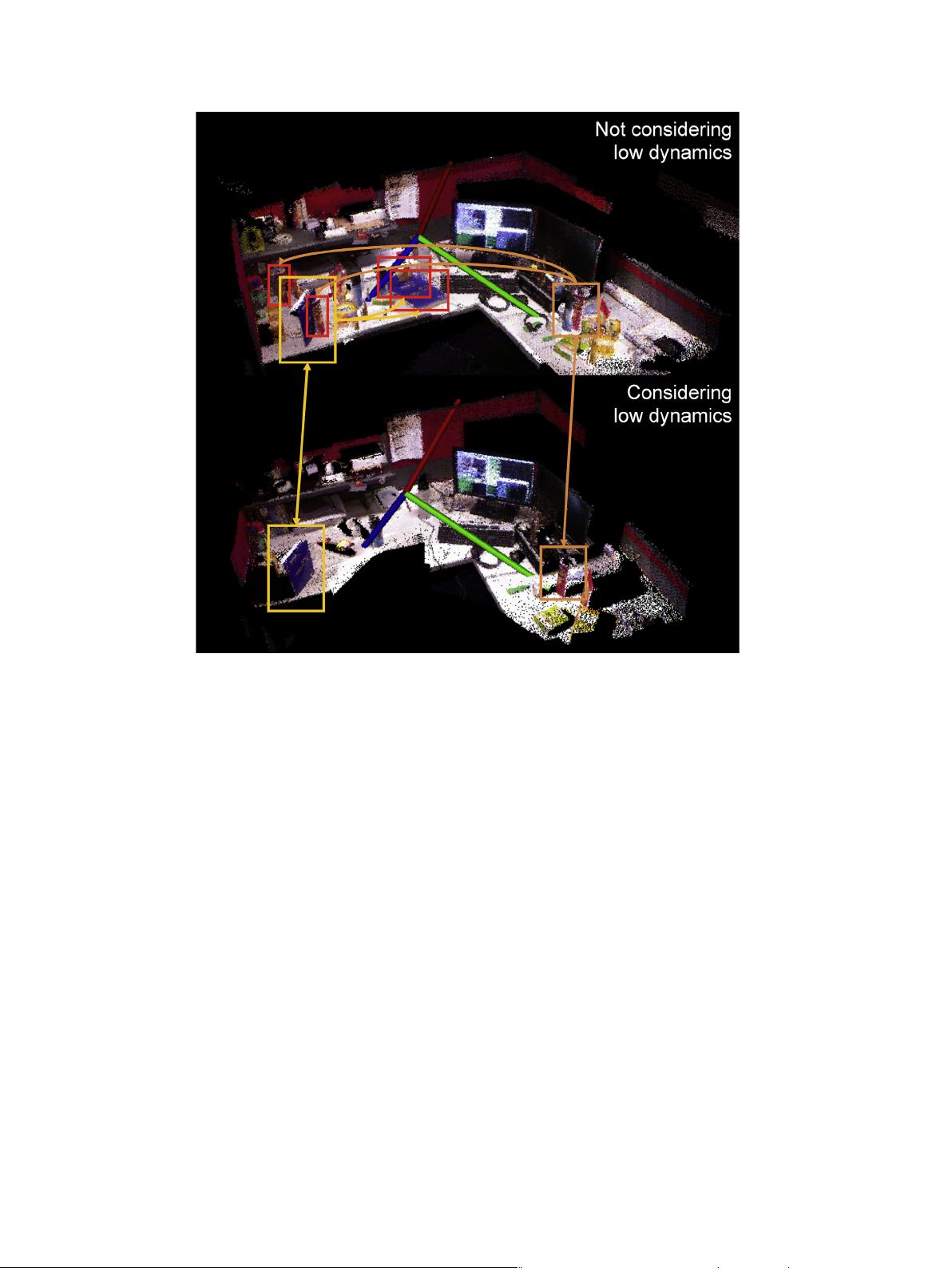
Fig. 1. A comparison of the reconstructed low dynamic environment in point cloud with 10 sessions mapping using multi-session SLAM without considering the
low dynamics (top) and proposed framework considering the low dynamics (bottom). One can see that the book, box, bottles and plastic bags are repeated, making
the scene with incorrect duplicated information. The book and the chip can are highlighted using light and dark orange rectangles. Their out-of-dated positions are
highlighted using red rectangles. The arrows demonstrate the correspondence.
92 Y. Wang et al. / CAAI Transactions on Intelligence Technology 1 (2016) 90e103
剩余13页未读,继续阅读
2023-08-10 上传
2018-05-05 上传
2023-05-21 上传
2023-05-25 上传
2023-04-06 上传
2023-06-02 上传
2023-08-25 上传
2023-03-07 上传
2023-06-08 上传


donghanruchen
- 粉丝: 0
- 资源: 37
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
