随机模型预测控制与数据驱动MPC
需积分: 10 127 浏览量
更新于2024-07-15
收藏 22.18MB PDF 举报
"7-stochastic_mpc.pdf 是一份关于模型预测控制(Model Predictive Control, MPC)的专业课程讲义,由Alberto Bemporad教授提供。这份资料涵盖了MPC的基础概念,包括线性MPC、时变和非线性MPC、基于二次规划(Quadratic Programming, QP)的MPC计算、显式MPC以及混合MPC。特别地,它还深入探讨了随机模型预测控制(Stochastic Model Predictive Control, SMPC)和数据驱动的MPC方法。课程页面位于http://cse.lab.imtlucca.it/~bemporad/mpc_course.html,提供了更多相关学习资源。
在实际控制问题中,决策常常需要在不确定性环境下进行,例如可再生能源的功率输出、市场价格、需求变化以及人类交互等都存在不确定性。传统的鲁棒控制方法不考虑不确定性本身,只是假设其在一定范围内,并以最坏情况为设计依据,这可能导致过于保守的控制策略。相反,随机模型能够提供更多关于不确定性的信息,使得控制器能够在优化性能指标(如最小化预期经济成本)的同时,更好地处理不确定性。
随机模型预测控制是应对不确定性的一种策略,它在优化过程中考虑了随机变量的分布,旨在在不确定性下做出最优决策。通过这种控制策略,系统可以更加灵活地适应环境变化,同时保持良好的性能表现。SMPC不仅关注控制系统的稳定性,还追求在概率意义下的性能优化,例如最大化期望的系统性能或最小化风险。
在实际应用中,SMPC涉及到的概率模型可能包括概率约束、随机动态模型以及随机目标函数。控制器需要在每个时间步长内,对未来的不确定性进行预测,并基于这些预测结果优化控制序列。这个优化过程通常涉及复杂的数学计算,例如动态编程或者启发式算法。同时,为了降低计算复杂性,可能会采用滚动优化或者有限预测期的方法。
这份资料详细介绍了如何在不确定性环境中利用模型预测控制来制定优化决策,特别是聚焦于随机模型预测控制的原理和应用,对于理解如何在实际工程问题中有效地处理不确定性具有重要价值。"
•frozen-time:$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$(causal$prediction)$
•prescient$control:$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$(non-causal)$
•certainty$equivalence:$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$(causal)
Only$a$sequence$of$disturbances$is$considered
{w
0
,w
1
,...,w
k1
}
w
k
⌘ w(t), 8k
w
k
⌘ w(t + k)
w
k
= E[w(t + k)|t]
07 -
(C)$2018$A.$Bemporad$-$“Model$Predictive$Control”$course
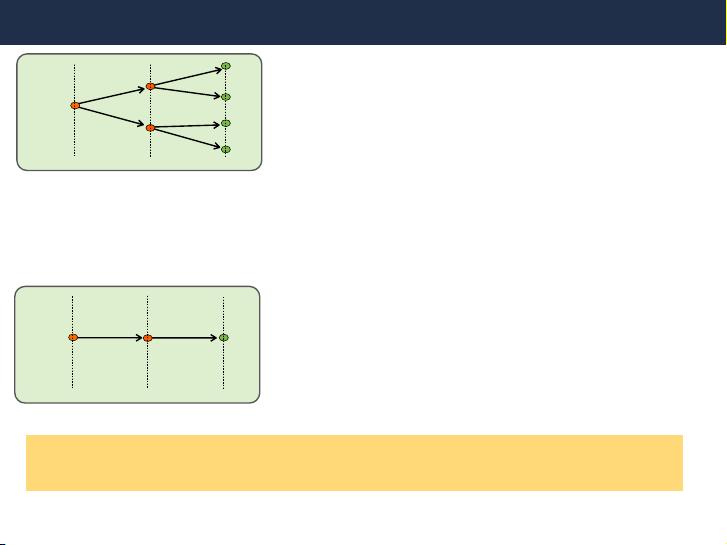
Free control variables
13
k =0
k =1
k = N
u
0
w
1
0
w
s
0
w
1
N 1
w
s
N 1
x
0
= x(t)
x
1
N
x
S
N
w
s
N 1
w
1
N 1
u
1
1
u
s
1
u
1
w
0
w
N 1
x
N
k =0
k =1
k = N
u
0
x
0
= x(t)
Stochastic0optimal0control
Deterministic0control
Decision$u
k
$only$depends$on$past$disturbance$realizations$!
We$can$trade$off$between$complexity$of$optimization$problem$!
(=number$of$nodes)$and$performance$(=accuracy$of$stochastic$modeling)
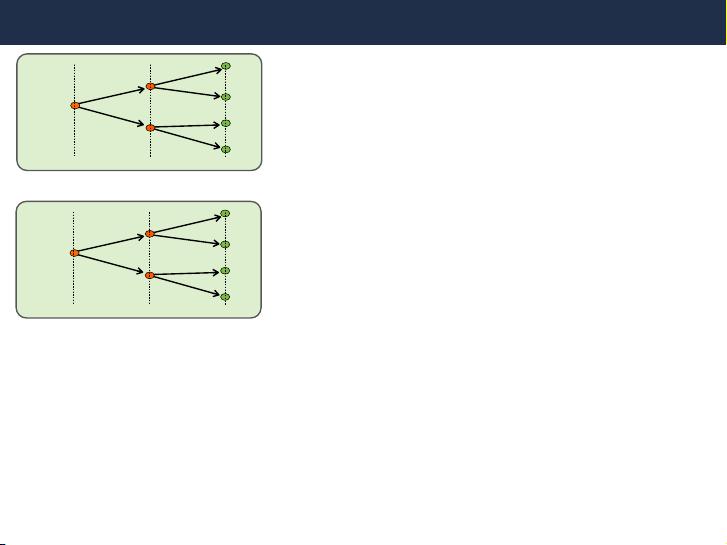
Causality0constraint:$$$$$$$$$$$$$$$$$$$$$when$scenarios$j$
and$h$share$the$same$node$at$prediction$time$k$
(for$example:$$$$$$$$$$$$$$$$$$$at$root$node$k =0)
u
j
k
= u
h
k
u
j
0
⌘ u
h
0
Free control variables
©2020 A. Bemporad - "Model Predictive Control" 14/82
剩余87页未读,继续阅读
2024-04-14 上传
2024-04-14 上传
2023-05-19 上传
2023-05-24 上传
2023-07-11 上传
2023-07-13 上传
2024-01-04 上传
2023-05-14 上传
2023-07-16 上传
2023-04-20 上传

feifanyyh
- 粉丝: 2
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
